You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- About The ProjectDocument5 pagesAbout The Projectanand kumarNo ratings yet
- Attitude Summary MFDocument8 pagesAttitude Summary MFAraz YagubluNo ratings yet
- PHY11L E201: Work, Energy, and PowerDocument16 pagesPHY11L E201: Work, Energy, and PowerMikaella TambisNo ratings yet
- PHD Thesis Report Format Guidelines: S.No. Guidelines SpecificationsDocument10 pagesPHD Thesis Report Format Guidelines: S.No. Guidelines SpecificationsAr Ayoushika AbrolNo ratings yet
- MODULE-11 Human Person As Oriented Towards Their Impending DeathDocument18 pagesMODULE-11 Human Person As Oriented Towards Their Impending DeathRoyceNo ratings yet
- Chung Hwa Middle School, BSB Science Chapter 8 Worksheet: MagnetismDocument4 pagesChung Hwa Middle School, BSB Science Chapter 8 Worksheet: MagnetismSherlly HingNo ratings yet
- EN-32m Manual For The HG32M - PDFDocument69 pagesEN-32m Manual For The HG32M - PDFJuan José Matos Ch100% (1)
- Sample Ravens SPM Online ReportDocument5 pagesSample Ravens SPM Online ReportAyaw Jud Ko LabdaNo ratings yet
- EDUC5271 Week 3 Written Assignment Unit 3Document7 pagesEDUC5271 Week 3 Written Assignment Unit 3Meleisa GordonNo ratings yet
- Demographics Data Table: Lesson 1: Step 1Document3 pagesDemographics Data Table: Lesson 1: Step 1Julia AbreuNo ratings yet
- Parts Catalog: Imagerunner Advance 6075/6065/6055 SeriesDocument201 pagesParts Catalog: Imagerunner Advance 6075/6065/6055 SeriesTally LeonNo ratings yet
- Project Risk ManagementDocument104 pagesProject Risk Managementtsrinivasan5083No ratings yet
- ENaresh BossBabu GRahul 33Document6 pagesENaresh BossBabu GRahul 33anthonyNo ratings yet
- Tanuj CVDocument2 pagesTanuj CVVikram Pratap SinghNo ratings yet
- Scheme of Answers TUTORIAL WEEK 5Document2 pagesScheme of Answers TUTORIAL WEEK 5hdyhNo ratings yet
- Interpersonal and Interapersonal Communication6Document20 pagesInterpersonal and Interapersonal Communication6abh ljknNo ratings yet
- Constructing A Project PlanDocument2 pagesConstructing A Project Planmariz angel d dagodogNo ratings yet
- TKL Pump - Data - SheetDocument1 pageTKL Pump - Data - Sheetธนาชัย เต็งจิรธนาภาNo ratings yet
- Reading 1 - Science - BIOL105 - Disease - ResponseDocument9 pagesReading 1 - Science - BIOL105 - Disease - ResponsemykrohNo ratings yet
- Brainstorming and OutliningDocument7 pagesBrainstorming and OutliningWalter Evans LasulaNo ratings yet
- Curl (Mathematics) - Wikipedia, The Free EncyclopediaDocument13 pagesCurl (Mathematics) - Wikipedia, The Free EncyclopediasoumyanitcNo ratings yet
- Experiencing Meanings in Spark S The Prime of Miss Jean BrodieDocument18 pagesExperiencing Meanings in Spark S The Prime of Miss Jean BrodieMaria AgusNo ratings yet
- Natural Science Tech Matter Materials Processing Mat Processed MaterialsDocument8 pagesNatural Science Tech Matter Materials Processing Mat Processed MaterialsRaeesa SNo ratings yet
- Window Pane Reflection ProblemDocument8 pagesWindow Pane Reflection ProblemLee GaoNo ratings yet
- Etha FoamDocument4 pagesEtha Foaml561926No ratings yet
- Elastic CollisionDocument1 pageElastic CollisionTeo Hui pingNo ratings yet
- Solutions Through Dowsing PDFDocument106 pagesSolutions Through Dowsing PDFkumar100% (6)
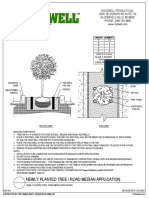
- Newly Planted Tree / Road Median ApplicationDocument1 pageNewly Planted Tree / Road Median ApplicationmooolkaNo ratings yet
- DR TahaniCV 2012Document5 pagesDR TahaniCV 2012Yousif_AbdalhalimNo ratings yet
- 34630.Seneca-Resume Writing Guide PDFDocument8 pages34630.Seneca-Resume Writing Guide PDFfiq_hugo319No ratings yet