You might also like
- ACT Math Formula Cheat Sheet 2021Document14 pagesACT Math Formula Cheat Sheet 2021AbdelrahmanNo ratings yet
- Mathcounts BibleDocument7 pagesMathcounts BibleNicole Yang100% (1)
- Robotics and Control by MittalDocument186 pagesRobotics and Control by Mittalsujay nayakNo ratings yet
- IGCSE Past Year Questions on Indices and SurdsDocument26 pagesIGCSE Past Year Questions on Indices and SurdsChitrah LcNo ratings yet
- Preparation For SeamoDocument3 pagesPreparation For SeamoTue AnhNo ratings yet
- 3d ShapesDocument31 pages3d Shapesapi-301812560No ratings yet
- Art in The Mathematics Classroom: Islamic Geometry: Charlotte WebbDocument48 pagesArt in The Mathematics Classroom: Islamic Geometry: Charlotte Webbmoka100% (3)
- Sum of Interior Angles of a Convex PolygonDocument5 pagesSum of Interior Angles of a Convex PolygonSHERWIN S. CASTILLONo ratings yet
- Lets22 Ultimate Math FinalDocument30 pagesLets22 Ultimate Math FinalJudie Jane MuegaNo ratings yet
- Analytic Geometry: College of Engineering and Technology Civil Engineering ProgramDocument18 pagesAnalytic Geometry: College of Engineering and Technology Civil Engineering ProgramJoan Cristine DacuyanNo ratings yet
- Equation DiracDocument69 pagesEquation DiracPatricia Poma100% (1)
- Flexural Analysis and Stress Calculations in Beams and PlatesDocument15 pagesFlexural Analysis and Stress Calculations in Beams and Platesharu oharuNo ratings yet
- A Mathematica Package For Visualizing Objects Inmersed in R4Document15 pagesA Mathematica Package For Visualizing Objects Inmersed in R4David H. IlbertNo ratings yet
- Assignment 2 SolutionsDocument13 pagesAssignment 2 SolutionsboyarskyNo ratings yet
- Macdougall Jim HeronapgpDocument7 pagesMacdougall Jim HeronapgpPerepePereNo ratings yet
- Airy FunctionsDocument7 pagesAiry FunctionsMarlen SaavedraNo ratings yet
- Problem Set 3 SolutionsDocument7 pagesProblem Set 3 SolutionsBenjamin MullenNo ratings yet
- Laurio, Christian M. Ps 123-Mathematical Physics Iii Dr. Barretto MARCH 28, 2012 Long Exam 2Document9 pagesLaurio, Christian M. Ps 123-Mathematical Physics Iii Dr. Barretto MARCH 28, 2012 Long Exam 2John Kelly MercadoNo ratings yet
- A Simple Method To Solve Quartic Equations: June 2012Document7 pagesA Simple Method To Solve Quartic Equations: June 2012Edmil Jhon AriquezNo ratings yet
- Proton and Electron SecondsDocument54 pagesProton and Electron SecondsIan BeardsleyNo ratings yet
- Mechanics SolutionsDocument7 pagesMechanics SolutionsJoelNo ratings yet
- ME314 Freudenstein Equation Function GeneratorDocument15 pagesME314 Freudenstein Equation Function Generatorvenkatanaveen306No ratings yet
- hmwk4 Sol PDFDocument7 pageshmwk4 Sol PDFSandra CelisNo ratings yet
- Vector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Document5 pagesVector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Comical comicNo ratings yet
- Vectors BerkeleyDocument2 pagesVectors BerkeleyInfernusNo ratings yet
- Calculus Early Transcendentals, 10th Edition05Document1 pageCalculus Early Transcendentals, 10th Edition05LamiaNo ratings yet
- 2020-1-SAR-MOCT TEST Section A (45 Marks) : Answer All QuestionsDocument2 pages2020-1-SAR-MOCT TEST Section A (45 Marks) : Answer All QuestionsMelody OngNo ratings yet
- Roots of a Quartic and Elliptic IntegralsDocument4 pagesRoots of a Quartic and Elliptic IntegralsEduardo MullerNo ratings yet
- Abstract CosmologyDocument32 pagesAbstract CosmologyIan BeardsleyNo ratings yet
- Determining The Coordinates of Special Trigonometric PointsDocument2 pagesDetermining The Coordinates of Special Trigonometric PointsRyza Mae BarbasinaNo ratings yet
- A Silo - Tips - Directional-Drilling-Advanced-Trajectory-Modelling-1Document1 pageA Silo - Tips - Directional-Drilling-Advanced-Trajectory-Modelling-1Cristian SalazarNo ratings yet
- ARML Competition 2014 SolutionsDocument36 pagesARML Competition 2014 SolutionsKai Chung TamNo ratings yet
- Analytic Solution of Simplified Cardan's Shaft Model: M. Zaj I Cek, J. DupalDocument14 pagesAnalytic Solution of Simplified Cardan's Shaft Model: M. Zaj I Cek, J. DupalMuhammad FaisalNo ratings yet
- Quiz 1 (Chapter 14) - SolutionsDocument12 pagesQuiz 1 (Chapter 14) - Solutionsxperia30No ratings yet
- Control2 en SolDocument2 pagesControl2 en SolIsma HatakeNo ratings yet
- Module 2 Practice 1Document2 pagesModule 2 Practice 1kkkkllllNo ratings yet
- Module 2 Practice 1Document2 pagesModule 2 Practice 1HANSNo ratings yet
- Module2practice1 PDFDocument2 pagesModule2practice1 PDFkkkkllllNo ratings yet
- Unit 1 Module 2 TestDocument2 pagesUnit 1 Module 2 TestHANSNo ratings yet
- Fundamentals of Ultrasonic Phased Arrays - 101-110Document10 pagesFundamentals of Ultrasonic Phased Arrays - 101-110Kevin HuangNo ratings yet
- Dedicated To Professor Dr. Ioan A. Rus On His 70th BirthdayDocument17 pagesDedicated To Professor Dr. Ioan A. Rus On His 70th Birthdayfahri_amirullahNo ratings yet
- TSI-LIB-131Aslam Kassimali Matrix Analysis of Structure-Alvarez1Document25 pagesTSI-LIB-131Aslam Kassimali Matrix Analysis of Structure-Alvarez1Alexander Ivan Cornejo SanchezNo ratings yet
- 11th Maths V1 Important 2, 3 & 5 Marks - 230817 - 212127Document29 pages11th Maths V1 Important 2, 3 & 5 Marks - 230817 - 212127srimurugancomputers.sengalNo ratings yet
- Week12 Lect1 HandoutsDocument4 pagesWeek12 Lect1 HandoutsManuel Xavier RajeshNo ratings yet
- Mathematics N4: April Examination National CertificateDocument6 pagesMathematics N4: April Examination National CertificateChantel MahlanguNo ratings yet
- Ternary For ArxivDocument15 pagesTernary For ArxivPat McGrathNo ratings yet
- One Real Function Instead of The Dirac Spinor FunctionDocument6 pagesOne Real Function Instead of The Dirac Spinor FunctionSamantha Loredo RamirezNo ratings yet
- Script 1011 WaveDocument10 pagesScript 1011 Wavetanvir04104No ratings yet
- 053440491X 145 PDFDocument50 pages053440491X 145 PDFvikas bhaskarNo ratings yet
- Identitas RamanujamDocument18 pagesIdentitas RamanujamJuwandaNo ratings yet
- Joseph - Thomas - Yr 13 P34 AssignmentDocument22 pagesJoseph - Thomas - Yr 13 P34 AssignmentHana SaleemNo ratings yet
- FreudDocument15 pagesFreudKrishnanath ReghunadhanNo ratings yet
- SNU 2019 ExamsDocument43 pagesSNU 2019 ExamsSamuel MergaNo ratings yet
- Applied Calculus Teaching PlanDocument39 pagesApplied Calculus Teaching PlanbigbangmelvanNo ratings yet
- Matlab ProblemsDocument12 pagesMatlab Problemsganesh naidu dasariNo ratings yet
- HMMT November 2013: Theme RoundDocument3 pagesHMMT November 2013: Theme Roundau auNo ratings yet
- Half Yearly Test Paper - Applied MathematicsDocument4 pagesHalf Yearly Test Paper - Applied Mathematicslohiyadhrumil2007No ratings yet
- Transmission Optimization of Spatial 4-Link Mechanisms'T"Document21 pagesTransmission Optimization of Spatial 4-Link Mechanisms'T"Omer SenNo ratings yet
- Practice Questions Lectures 1-22 UpdatedDocument32 pagesPractice Questions Lectures 1-22 Updatedshaheerkhan010101No ratings yet
- Abstract CosmologyDocument47 pagesAbstract CosmologyIan BeardsleyNo ratings yet
- 2022 Functions and GraphsDocument16 pages2022 Functions and GraphsmvelonhlemsimangoNo ratings yet
- Quasi-Static Transient Thermal Stresses in A Neumann's Thin Solid Cylinder With Internal Moving Heat SourceDocument5 pagesQuasi-Static Transient Thermal Stresses in A Neumann's Thin Solid Cylinder With Internal Moving Heat SourceAJER JOURNALNo ratings yet
- Inverse Kinematics of Robotic Manipulators ExplainedDocument22 pagesInverse Kinematics of Robotic Manipulators ExplainedAchu BalachandranNo ratings yet
- Term 1 Controlled Test GR 12 MathematicsDocument9 pagesTerm 1 Controlled Test GR 12 MathematicsMichael AkintolaNo ratings yet
- Solutions 4 For Oscillations and WavesDocument5 pagesSolutions 4 For Oscillations and WavesUmarNo ratings yet
- Mce647 3p5Document13 pagesMce647 3p5Abdelaziz IderNo ratings yet
- 1 1 40 869Document6 pages1 1 40 869matic91No ratings yet
- Último DeberDocument9 pagesÚltimo DeberAndiko Villacis Navas100% (1)
- 46922.europe Jewel 14 Days Tourradar - PDFDocument16 pages46922.europe Jewel 14 Days Tourradar - PDFAndiko Villacis NavasNo ratings yet
- 1 1 40 869Document6 pages1 1 40 869matic91No ratings yet
- Lecture7. - Cinematica Robots Mobiles PDFDocument38 pagesLecture7. - Cinematica Robots Mobiles PDFAndiko Villacis NavasNo ratings yet
- Copia de Reporte de Laboratorio - Lab1 - v2Document18 pagesCopia de Reporte de Laboratorio - Lab1 - v2Andiko Villacis NavasNo ratings yet
- Petro SDocument4 pagesPetro SueberschallNo ratings yet
- Inverse Kinematics of a Robotic ManipulatorDocument8 pagesInverse Kinematics of a Robotic ManipulatorAndiko Villacis NavasNo ratings yet
- AirPort Extreme and Bluetooth Regulatory CertificationDocument1 pageAirPort Extreme and Bluetooth Regulatory CertificationSalvatore MicalizziNo ratings yet
- Solution Manual For System Dynamics For Engineering Students Nicolae Lobontiu PDFDocument15 pagesSolution Manual For System Dynamics For Engineering Students Nicolae Lobontiu PDFAndiko Villacis Navas0% (1)
- SYLLABUS COD: ENG 0100-679-201710: Pág. 1 de 15Document15 pagesSYLLABUS COD: ENG 0100-679-201710: Pág. 1 de 15Andiko Villacis NavasNo ratings yet
- Correction SymbolsDocument4 pagesCorrection SymbolsAndiko Villacis NavasNo ratings yet
- Brett Robinson Gulf Corporation Phoenix 6 - HousekeeperDocument5 pagesBrett Robinson Gulf Corporation Phoenix 6 - HousekeeperAndiko Villacis NavasNo ratings yet
- QR 3000 L/S Dbormezcla QW 150 L/S Odrmezcla Dbor 10 MG/L Drmezcla Dbow 850 MG/L Odr 8 MG/L U Odw 0 MG/L H Ods 8.5 MG/L L KD 0.2 D - 1 KR 0.8 D - 1Document21 pagesQR 3000 L/S Dbormezcla QW 150 L/S Odrmezcla Dbor 10 MG/L Drmezcla Dbow 850 MG/L Odr 8 MG/L U Odw 0 MG/L H Ods 8.5 MG/L L KD 0.2 D - 1 KR 0.8 D - 1Andiko Villacis NavasNo ratings yet
- Should Same Sex Marriage Be Legalized?Document2 pagesShould Same Sex Marriage Be Legalized?Andiko Villacis NavasNo ratings yet
- QR 3000 L/S Dbormezcla QW 150 L/S Odrmezcla Dbor 10 MG/L Drmezcla Dbow 850 MG/L Odr 8 MG/L U Odw 0 MG/L H Ods 8.5 MG/L L KD 0.2 D - 1 KR 0.8 D - 1Document21 pagesQR 3000 L/S Dbormezcla QW 150 L/S Odrmezcla Dbor 10 MG/L Drmezcla Dbow 850 MG/L Odr 8 MG/L U Odw 0 MG/L H Ods 8.5 MG/L L KD 0.2 D - 1 KR 0.8 D - 1Andiko Villacis NavasNo ratings yet
- ST PHDocument21 pagesST PHAndiko Villacis NavasNo ratings yet
- Should Same Sex Marriage Be Legalized?Document2 pagesShould Same Sex Marriage Be Legalized?Andiko Villacis NavasNo ratings yet
- QR 3000 L/S Dbormezcla QW 150 L/S Odrmezcla Dbor 10 MG/L Drmezcla Dbow 850 MG/L Odr 8 MG/L U Odw 0 MG/L H Ods 8.5 MG/L L KD 0.2 D - 1 KR 0.8 D - 1Document21 pagesQR 3000 L/S Dbormezcla QW 150 L/S Odrmezcla Dbor 10 MG/L Drmezcla Dbow 850 MG/L Odr 8 MG/L U Odw 0 MG/L H Ods 8.5 MG/L L KD 0.2 D - 1 KR 0.8 D - 1Andiko Villacis NavasNo ratings yet
- Sample Paper 10: Class - X Exam 2021-22 (TERM - II) Mathematics BasicDocument3 pagesSample Paper 10: Class - X Exam 2021-22 (TERM - II) Mathematics BasicTanushi GulatiNo ratings yet
- Math 111: Summary of Trig IdentitiesDocument1 pageMath 111: Summary of Trig IdentitiesJhan Ray Gomez BarrilNo ratings yet
- 2019 Grade 08 Maths Third Term Paper English Medium Niwithigala Education ZoneDocument9 pages2019 Grade 08 Maths Third Term Paper English Medium Niwithigala Education Zonememohamed171100% (1)
- Spheres, Cones and Cylinders: 1. (4 MarksDocument12 pagesSpheres, Cones and Cylinders: 1. (4 MarksKeri-ann MillarNo ratings yet
- Approximate Changes and Errors in CalculusDocument54 pagesApproximate Changes and Errors in CalculusRavinder yadavNo ratings yet
- Rabotna Tetratka 4 ODD PDFDocument78 pagesRabotna Tetratka 4 ODD PDFJakimovska AnaNo ratings yet
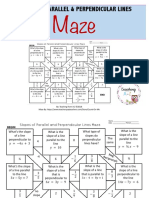
- Slopes of Parallel & Perpendicular Lines: By: Teaching From A-Z ©2018Document3 pagesSlopes of Parallel & Perpendicular Lines: By: Teaching From A-Z ©2018Carlene KigomaNo ratings yet
- Strema PDFDocument43 pagesStrema PDFAthena MontefalcoNo ratings yet
- Chapter 9: Trigonometry Ii: Cloned SPM Question (2006, Paper 1)Document3 pagesChapter 9: Trigonometry Ii: Cloned SPM Question (2006, Paper 1)namikNo ratings yet
- Labs-Engineering Drawing Lab 2Document7 pagesLabs-Engineering Drawing Lab 2rkadiraj7011No ratings yet
- Deal or NO Deal - 4th GRDocument25 pagesDeal or NO Deal - 4th GRGAD AM ITNo ratings yet
- Topics 1 and 2Document8 pagesTopics 1 and 2MiaNo ratings yet
- CIRCLESDocument2 pagesCIRCLESSabria SantosNo ratings yet
- Edexcel - As Levels MathsDocument4 pagesEdexcel - As Levels MathsAhmad AhmadNo ratings yet
- Enhanced Mathematics Q3-LAS Week 3Document9 pagesEnhanced Mathematics Q3-LAS Week 3mia laordenNo ratings yet
- Kesetimbangan PartikelDocument25 pagesKesetimbangan PartikelGalih Indra SukmanaNo ratings yet
- Problem Set Plane GeometryDocument24 pagesProblem Set Plane GeometryJelline GonzalesNo ratings yet
- Troc HoidDocument25 pagesTroc HoidksdndknNo ratings yet
- Table Primitives UsuellesDocument1 pageTable Primitives UsuellesBlake LyNo ratings yet
- Ellipse Worksheet ApplicationsDocument3 pagesEllipse Worksheet ApplicationsMc Ethan ButraNo ratings yet
- Surface Area and Volume - 2023-24Document6 pagesSurface Area and Volume - 2023-24Aaratrika DasNo ratings yet