You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- MT-LXX Parallel Manual PDFDocument120 pagesMT-LXX Parallel Manual PDFJunior Alexander Rodriguez Rodriguez0% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shape of Water in Rotating Bucket - Physics Stack ExchangeDocument3 pagesShape of Water in Rotating Bucket - Physics Stack ExchangeHector TrianaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Image Processing Math Prob1Document13 pagesImage Processing Math Prob1MunmunNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- College Level Math Practice TestDocument17 pagesCollege Level Math Practice TestHarsha Kasaragod100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Building Utilities 3: Room AcousticsDocument11 pagesBuilding Utilities 3: Room AcousticsIzzah LNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Visit Braindump2go and Download Full Version 350-801 Exam DumpsDocument4 pagesVisit Braindump2go and Download Full Version 350-801 Exam DumpsArsic AleksandarNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- WSU Presentation 20220407Document63 pagesWSU Presentation 20220407debapriyoNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Visvesvaraya Technological University: "Dijkstra'S Algorithm"Document34 pagesVisvesvaraya Technological University: "Dijkstra'S Algorithm"RASHMINo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Translating Mathematical PhrasesDocument16 pagesTranslating Mathematical PhrasesApple Jean Yecyec AlagNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- MMM - Unit 1Document133 pagesMMM - Unit 1Ahmed Raza MokashiNo ratings yet
- User Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsDocument64 pagesUser Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsRVNLPKG6B VBL-GTLMNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 1.bitwise OperatorsDocument2 pages1.bitwise OperatorsPaul kollamNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- m1100 s12 v1.1f en - Fender - DesignDocument48 pagesm1100 s12 v1.1f en - Fender - Designdzul fiqarNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Installation Manual: DPS 232 Differential Positioning SystemDocument154 pagesInstallation Manual: DPS 232 Differential Positioning SystemVladimirs Arzeninovs100% (3)
- Bafbana Module 5Document12 pagesBafbana Module 5VILLANUEVA, RAQUEL NONANo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- L071ME4182DFADocument81 pagesL071ME4182DFAmegamech23No ratings yet
- Craig Pirrong-Commodity Price Dynamics - A Structural Approach-Cambridge University Press (2011) PDFDocument239 pagesCraig Pirrong-Commodity Price Dynamics - A Structural Approach-Cambridge University Press (2011) PDFchengadNo ratings yet
- TUC5+ Modbus ID Details PDFDocument10 pagesTUC5+ Modbus ID Details PDFvijikeshNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Winter Intership SyllabusDocument14 pagesWinter Intership SyllabusAjayNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- PHP Question AnswerDocument20 pagesPHP Question AnswerManish SharmaNo ratings yet
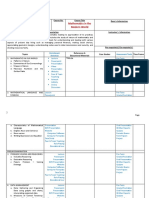
- Mathematics in The Modern World: Course No. Course Title Dean's InformationDocument5 pagesMathematics in The Modern World: Course No. Course Title Dean's InformationJayson SantelicesNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Owners Manual 2018Document49 pagesOwners Manual 2018Marv-Vic SantosNo ratings yet
- UML Class Diagram Examples of Common Scenarios - EdrawMaxDocument12 pagesUML Class Diagram Examples of Common Scenarios - EdrawMaxelizabeth enggNo ratings yet
- Cswip Appendix 01Document23 pagesCswip Appendix 01Nsidibe Michael EtimNo ratings yet
- HCL McQs SET-3Document8 pagesHCL McQs SET-3ThorNo ratings yet
- Palette For Colorfastness PilotDocument25 pagesPalette For Colorfastness Pilotjenal aripinNo ratings yet
- SSC CGL Tier-Ii Grand Test - 9Document5 pagesSSC CGL Tier-Ii Grand Test - 9A SAI PAVANNo ratings yet
- S32K14X RM Rev 4Document1,929 pagesS32K14X RM Rev 4Nguyễn Duy HùngNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Contoh SRSDocument46 pagesContoh SRSFatur RachmanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)