You might also like
- Adams 2013 Training 740 WorkbookDocument458 pagesAdams 2013 Training 740 WorkbookAnonymous ZC1ld1CLm100% (1)
- To Call A Function From BI PublisherDocument6 pagesTo Call A Function From BI PublisherbalasukNo ratings yet
- Proportional/Servo Valve Automatic Test Bench: Hangzhou Rebotech Co.,LtdDocument20 pagesProportional/Servo Valve Automatic Test Bench: Hangzhou Rebotech Co.,LtdCuneytNo ratings yet
- Build A Robot: Prime Lessons Prime LessonsDocument7 pagesBuild A Robot: Prime Lessons Prime LessonsRamaDinakaranNo ratings yet
- Description and Operation: Component Maintenance ManualDocument8 pagesDescription and Operation: Component Maintenance ManualLou Parker100% (1)
- Fork Lift PDFDocument13 pagesFork Lift PDFRamaDinakaranNo ratings yet
- HDS Storage Foundations Exam Questions and AnswersDocument42 pagesHDS Storage Foundations Exam Questions and Answersthuralwin85No ratings yet
- Digital PID For DC Motor ControlDocument7 pagesDigital PID For DC Motor ControlMohsensorNo ratings yet
- Assignment#3Document2 pagesAssignment#3Amit SinghNo ratings yet
- M475 c2 L7 EmulationDocument11 pagesM475 c2 L7 EmulationAli AlmakhmariNo ratings yet
- M475 - c2 - L3 - Digital Control SystemsDocument8 pagesM475 - c2 - L3 - Digital Control SystemsAli AlmakhmariNo ratings yet
- GM Signal&systemDocument93 pagesGM Signal&systemBhaskar SharmaNo ratings yet
- Dada La Señal No Periódica G (T)Document27 pagesDada La Señal No Periódica G (T)Marko Chambi ColqueNo ratings yet
- Assignment#2Document2 pagesAssignment#2vaishnaviNo ratings yet
- Solution of Discrete Time State Equations: EE-601: Linear System TheoryDocument42 pagesSolution of Discrete Time State Equations: EE-601: Linear System TheorysunilsahadevanNo ratings yet
- An Atlas of Engineering Dynamic Systems, Models, and Transfer FunctionsDocument37 pagesAn Atlas of Engineering Dynamic Systems, Models, and Transfer Functionshazem ab2009No ratings yet
- ENGG2310A (Fall 2018) : Problem 1-1Document11 pagesENGG2310A (Fall 2018) : Problem 1-1Tsz Wing YipNo ratings yet
- Lecture 3 ModelingDocument28 pagesLecture 3 ModelingSai AnoopNo ratings yet
- Gram Schmidt OrthogonalizationDocument12 pagesGram Schmidt OrthogonalizationSanehNo ratings yet
- Lecture 14Document15 pagesLecture 14gprem89No ratings yet
- Time-Domain Analysis of The Linear SystemsDocument32 pagesTime-Domain Analysis of The Linear SystemskamalNo ratings yet
- Pulse Transfer Function AnalysisDocument14 pagesPulse Transfer Function Analysisdilawar sumraNo ratings yet
- L3: Linear, Time-Invariant (LTI) Systems and Linear DistortionDocument25 pagesL3: Linear, Time-Invariant (LTI) Systems and Linear DistortionHunter VerneNo ratings yet
- MAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Document3 pagesMAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Gerardo Mendoza RicaudNo ratings yet
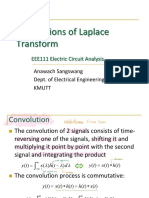
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- Zero Order HoldDocument19 pagesZero Order HoldSn ProfNo ratings yet
- Vector Valued Functions MathDocument12 pagesVector Valued Functions MathRyan Jhay YangNo ratings yet
- CONTROLLER DESIGNDocument15 pagesCONTROLLER DESIGNFlat MateNo ratings yet
- Research On Temperature Control of Heating FurnaceDocument10 pagesResearch On Temperature Control of Heating FurnaceŠarra MkNo ratings yet
- Greens Functions: Dr. Imalie Gamalath Dept. of Phys University of Colombo (Sri Lanka)Document50 pagesGreens Functions: Dr. Imalie Gamalath Dept. of Phys University of Colombo (Sri Lanka)A1973rayNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
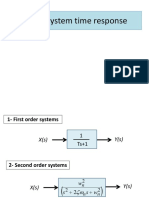
- System Time Response AnalysisDocument16 pagesSystem Time Response AnalysisAndrewAbdelmassiehNo ratings yet
- Fourier Series Expansion of Periodic Signal: (With Period of T)Document45 pagesFourier Series Expansion of Periodic Signal: (With Period of T)Khaaliq DeJanNo ratings yet
- Vector Functions and Space CurvesDocument324 pagesVector Functions and Space CurvesTrần Việt HằngNo ratings yet
- Discrete Approximation of Continuous Systems: CSE 421 Digital ControlDocument15 pagesDiscrete Approximation of Continuous Systems: CSE 421 Digital ControlAhmed YounisNo ratings yet
- MHS11 Z TransformDocument16 pagesMHS11 Z TransformHassan El-kholyNo ratings yet
- PID Controller BTechDocument27 pagesPID Controller BTechAkash RoyNo ratings yet
- Fourier Series PresentationDocument81 pagesFourier Series PresentationRajithNimali100% (1)
- CS - Formul KağidiDocument5 pagesCS - Formul KağidiponcikramizNo ratings yet
- Slides Robin CADDocument34 pagesSlides Robin CADJorge MunozNo ratings yet
- Discrete-Time Systems: Discretization, Models and Their PropertiesDocument66 pagesDiscrete-Time Systems: Discretization, Models and Their PropertiesbalkyderNo ratings yet
- EE207 Problem set 1 IIT ROPARDocument7 pagesEE207 Problem set 1 IIT ROPARsumithasreekumar5No ratings yet
- Rangkuman tabel sistem dinamik listrik dan mekanikDocument2 pagesRangkuman tabel sistem dinamik listrik dan mekanikWiliam AhmadNo ratings yet
- System TheoryDocument17 pagesSystem TheoryMichael CampbellNo ratings yet
- Formula SheetDocument4 pagesFormula Sheetgeyoxi5098No ratings yet
- Handout - 04 (CT)Document4 pagesHandout - 04 (CT)Mohian RahmanNo ratings yet
- Discrete-Time Control Systems DesignDocument12 pagesDiscrete-Time Control Systems DesignLucas SantosNo ratings yet
- 3 Fourier Series Representation of Periodic SignalsDocument31 pages3 Fourier Series Representation of Periodic SignalspatelIbrahimNo ratings yet
- Black-Scholes Formulas Sheet for Options PricingDocument3 pagesBlack-Scholes Formulas Sheet for Options PricingIvanNo ratings yet
- S&S L5Document77 pagesS&S L5Aalaa Hussein HamidNo ratings yet
- Module 1 - DC PrintDocument21 pagesModule 1 - DC Printunknown MeNo ratings yet
- Introduction To Classical Linear Control SystemsDocument7 pagesIntroduction To Classical Linear Control SystemsDj OoNo ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- Nyquist Sampling Theorem and Signal ReconstructionDocument13 pagesNyquist Sampling Theorem and Signal ReconstructionSalmaanCadeXaajiNo ratings yet
- EE419 Digital Communication Systems QuestionsDocument7 pagesEE419 Digital Communication Systems QuestionsSalai JeyaseelanNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- M475 - c2 - L8 - Discrete Time ModelingDocument8 pagesM475 - c2 - L8 - Discrete Time ModelingAli AlmakhmariNo ratings yet
- Signals Approximation, 2 NfcietDocument7 pagesSignals Approximation, 2 Nfcietapi-19788618No ratings yet
- IntroMDsimulations WGwebinar 01nov2017Document76 pagesIntroMDsimulations WGwebinar 01nov2017Rizal SinagaNo ratings yet
- Numerical Time-Stepping Methods for Dynamic ResponseDocument14 pagesNumerical Time-Stepping Methods for Dynamic ResponseAryan BhattaraiNo ratings yet
- Week04Module03 FourierTransformsDocument13 pagesWeek04Module03 FourierTransformsrra127No ratings yet
- AP CALCULUS Curriculum Module: MotionDocument32 pagesAP CALCULUS Curriculum Module: MotionteachopensourceNo ratings yet
- Signals and Systems (Practice Questions - Laplace Transform)Document26 pagesSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Chapter 1 BEEU 2033Document51 pagesChapter 1 BEEU 2033nurfazlinda123No ratings yet
- Signal & System WB SolutionsDocument226 pagesSignal & System WB SolutionsCHANDRIMA UPADHYAYNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Lego Wedo 2.0: What Are Lego Wedos?Document13 pagesLego Wedo 2.0: What Are Lego Wedos?RamaDinakaranNo ratings yet
- PIC MicrocontrollersDocument40 pagesPIC MicrocontrollersRamaDinakaranNo ratings yet
- ZUPTDocument16 pagesZUPTRamaDinakaranNo ratings yet
- Transfer Function MotorDocument14 pagesTransfer Function MotorSH WALEEDNo ratings yet
- An Introduction To Latex: O. V. Ramana MurthyDocument9 pagesAn Introduction To Latex: O. V. Ramana MurthyRamaDinakaranNo ratings yet
- Assignment 1: Compsci 1Jc3 Introduction To Computational Thinking Fall 2020Document5 pagesAssignment 1: Compsci 1Jc3 Introduction To Computational Thinking Fall 2020RamaDinakaranNo ratings yet
- Machinelearningforkids Ibmer PDFDocument4 pagesMachinelearningforkids Ibmer PDFDaniel Nuñez HernandezNo ratings yet
- Loading Effect of Instruments: D. Rama (I Year M. Tech. CI) CB. EN. P2CIN17006Document11 pagesLoading Effect of Instruments: D. Rama (I Year M. Tech. CI) CB. EN. P2CIN17006RamaDinakaranNo ratings yet
- M.Tech, Control and Instrumentation, First SemesterDocument4 pagesM.Tech, Control and Instrumentation, First SemesterRamaDinakaranNo ratings yet
- Aquickintroductiontoslidingmodecontrol PDFDocument22 pagesAquickintroductiontoslidingmodecontrol PDFKamaleshNo ratings yet
- Lab 5 ADocument14 pagesLab 5 AmohsinslatchNo ratings yet
- Design of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIDocument6 pagesDesign of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIRamaDinakaranNo ratings yet
- IEEE Paper FormatDocument3 pagesIEEE Paper FormatSanhith RaoNo ratings yet
- Design of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIDocument6 pagesDesign of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIRamaDinakaranNo ratings yet
- Design of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIDocument6 pagesDesign of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIRamaDinakaranNo ratings yet
- VHDL SS09 Teil06Document38 pagesVHDL SS09 Teil06Krishnakumar SomanpillaiNo ratings yet
- L&T Construction: Practice Aptitude Questions With Answer KeyDocument6 pagesL&T Construction: Practice Aptitude Questions With Answer KeyRamaDinakaranNo ratings yet
- Adc FpgaDocument12 pagesAdc FpgaVishal MehtaNo ratings yet
- A 32 BIT MAC Unit Design Using Vedic MulDocument10 pagesA 32 BIT MAC Unit Design Using Vedic MulRamaDinakaranNo ratings yet
- Z.zarkovfullpaper ELMA2015 v.5Document7 pagesZ.zarkovfullpaper ELMA2015 v.5RamaDinakaranNo ratings yet
- Find Position Using 3-Axis Accelerometer and Kalman Filter: Rama Dinakaran, Amrita Vishwa Vidyapeetham, CoimbatoreDocument3 pagesFind Position Using 3-Axis Accelerometer and Kalman Filter: Rama Dinakaran, Amrita Vishwa Vidyapeetham, CoimbatoreRamaDinakaranNo ratings yet
- Experiment 1Document15 pagesExperiment 1RamaDinakaran100% (1)
- Sensors 15 16448Document18 pagesSensors 15 16448RamaDinakaranNo ratings yet
- FPGA Implementation of Digital Controller For DC-DC Buck ConverterDocument6 pagesFPGA Implementation of Digital Controller For DC-DC Buck ConverterRamaDinakaranNo ratings yet
- A 32 BIT MAC Unit Design Using Vedic Multiplier and Reversible Logic GateDocument6 pagesA 32 BIT MAC Unit Design Using Vedic Multiplier and Reversible Logic GateRamaDinakaranNo ratings yet
- Post Graduate Course Software Systems Iiit HyderabadDocument20 pagesPost Graduate Course Software Systems Iiit HyderabadLipun SwainNo ratings yet
- Transport Layer: Unit - IVDocument19 pagesTransport Layer: Unit - IVHarishmaNo ratings yet
- Submit Report As JobDocument2 pagesSubmit Report As JobFrederico MorgadoNo ratings yet
- BN20 e PreDocument59 pagesBN20 e PreTuan DinhNo ratings yet
- GSM Technique Applied To Pre-Paid Energy MeterDocument9 pagesGSM Technique Applied To Pre-Paid Energy MeterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 3 Process Fundamentals Chapter 2 and 3Document74 pages3 Process Fundamentals Chapter 2 and 3Terry Conrad KingNo ratings yet
- CSS 10-Summative TEST 1Document4 pagesCSS 10-Summative TEST 1herbert reblora100% (1)
- WP SOX ComplianceDocument13 pagesWP SOX ComplianceanandsivNo ratings yet
- Database Assignment OverviewDocument5 pagesDatabase Assignment Overviewitzaz yousafNo ratings yet
- Pinouts ICRDocument38 pagesPinouts ICRAdal Vera100% (1)
- Ipv4 Address Classes PDFDocument2 pagesIpv4 Address Classes PDFAmol IngleNo ratings yet
- End of Chapter 8 (p.606) Questions 1,2,4,8,14.: Short AnswerDocument4 pagesEnd of Chapter 8 (p.606) Questions 1,2,4,8,14.: Short AnswerTung VanNo ratings yet
- Gravity WorkoutDocument4 pagesGravity WorkoutMIIBNo ratings yet
- Recruitment and Selection Centre: RSC Vacancy Bulletin No. 1/2013 Public Service Staff PostsDocument48 pagesRecruitment and Selection Centre: RSC Vacancy Bulletin No. 1/2013 Public Service Staff PostsRich bitchNo ratings yet
- FoxMeyer's ERP Implementation Failure Case StudyDocument30 pagesFoxMeyer's ERP Implementation Failure Case StudyNeo LiveNo ratings yet
- Nina Harris - Popper Lab Report 1Document3 pagesNina Harris - Popper Lab Report 1api-647760982No ratings yet
- Section 1.1: Configure The ACME Headquarters Network (AS 12345) As Per The Following RequirementsDocument59 pagesSection 1.1: Configure The ACME Headquarters Network (AS 12345) As Per The Following Requirementsdimkatsar30No ratings yet
- Islamabad Model College For Girls Shalimar F-74Document1 pageIslamabad Model College For Girls Shalimar F-74ADIL DURRANINo ratings yet
- Winfiol CommandDocument18 pagesWinfiol Commandhjk6500No ratings yet
- Life Elementary A2 Teachers Book Resources For TeaDocument1 pageLife Elementary A2 Teachers Book Resources For TeaNguyenhuuhoiNo ratings yet
- VFACE TOUCH AND BASIC QUICK INSTALLATION GUIDEDocument2 pagesVFACE TOUCH AND BASIC QUICK INSTALLATION GUIDEPunith RajNo ratings yet
- Peran Bumdes Dalam Pengelolaan Limbah Kelapa Sawit Di Desa Talang Jerinjing Kecamatan Rengat Barat Kabupaten Indragiri Hulu Provinsi RiauDocument11 pagesPeran Bumdes Dalam Pengelolaan Limbah Kelapa Sawit Di Desa Talang Jerinjing Kecamatan Rengat Barat Kabupaten Indragiri Hulu Provinsi RiauInnaka LestariNo ratings yet
- Edward Malek's MBA Engineering ResumeDocument1 pageEdward Malek's MBA Engineering ResumeEdward Nicklaus MalekNo ratings yet
- Vicon: Integrated Pump Vibration Monitoring SystemDocument2 pagesVicon: Integrated Pump Vibration Monitoring SystemMahmoud Al-SherbinyNo ratings yet
- DVD615 PDFDocument228 pagesDVD615 PDFFreddy FerrerNo ratings yet