You might also like
- Electrical Transformers and Rotating Machines 4th Edition Herman Solutions ManualDocument2 pagesElectrical Transformers and Rotating Machines 4th Edition Herman Solutions Manuala2264888170% (1)
- BS EN15194-2017 Cycles Electricallypowerassistedcycles EPACBicycleDocument135 pagesBS EN15194-2017 Cycles Electricallypowerassistedcycles EPACBicycleAnass Treyaoui100% (1)
- A Genetic Algorithm Approach For Solving Ac-Dc Optimal Power Flow ProblemDocument14 pagesA Genetic Algorithm Approach For Solving Ac-Dc Optimal Power Flow ProblemJoe RanteNo ratings yet
- Optimal network reconfiguration reduces power lossesDocument16 pagesOptimal network reconfiguration reduces power lossesMarulasiddappa H BNo ratings yet
- Reduce Losses of Conditional 11KV Distribution Network by Controlling Power of Distributed GenerationDocument20 pagesReduce Losses of Conditional 11KV Distribution Network by Controlling Power of Distributed GenerationJames XgunNo ratings yet
- Sine Cosine Algorithm For Optimal Placement and Sizing of Distributed Generation in Radial Distribution NetworkDocument11 pagesSine Cosine Algorithm For Optimal Placement and Sizing of Distributed Generation in Radial Distribution NetworkKeerati ChayakulkheereeNo ratings yet
- User-Friendly Tool For Power Flow Analysis and Distributed Generation Optimisation in Radial Distribution NetworksDocument11 pagesUser-Friendly Tool For Power Flow Analysis and Distributed Generation Optimisation in Radial Distribution NetworksArdhito PrimatamaNo ratings yet
- Optimal Placement of Pso Based Photovoltaic (PV) Distributed Generation (DG) in A Distribution SystemDocument16 pagesOptimal Placement of Pso Based Photovoltaic (PV) Distributed Generation (DG) in A Distribution SystemSeid EndrisNo ratings yet
- Samala-Kotapuri2020 Article OptimalAllocationOfDistributedDocument14 pagesSamala-Kotapuri2020 Article OptimalAllocationOfDistributedZainab SattarNo ratings yet
- Fuzzy Based DG Allocation For Loss Minimization in A Radial Distribution SystemDocument9 pagesFuzzy Based DG Allocation For Loss Minimization in A Radial Distribution Systemabera alemayehuNo ratings yet
- Improved Sequential Quadratic Programming Approach For Optimal Distribution Generation Sizing in Distribution NetworksDocument7 pagesImproved Sequential Quadratic Programming Approach For Optimal Distribution Generation Sizing in Distribution NetworksBibhudatta PatnaikNo ratings yet
- Utilizarea Tehnicilor de Clustering in Determinarea Locului Optim de Amplasare A Surselor de Generare DistrbuitaDocument6 pagesUtilizarea Tehnicilor de Clustering in Determinarea Locului Optim de Amplasare A Surselor de Generare DistrbuitaFlorina ScarlatacheNo ratings yet
- Distributed Optimal Power Flow For Smart MicrogridsDocument12 pagesDistributed Optimal Power Flow For Smart MicrogridsUdayKumarNo ratings yet
- Assessment of The Influence of Distributed Generation and Demand Side Management On Transmission System PerformanceDocument10 pagesAssessment of The Influence of Distributed Generation and Demand Side Management On Transmission System PerformanceArunchunai KarthiNo ratings yet
- Optimal Placement of Multi-Distributed Generation Units Including Different Load Models Using Particle Swarm OptimisationDocument12 pagesOptimal Placement of Multi-Distributed Generation Units Including Different Load Models Using Particle Swarm OptimisationAhmed WestministerNo ratings yet
- Multiple Distributed Generator Placement in Primary Distribution Networks For Loss ReductionDocument9 pagesMultiple Distributed Generator Placement in Primary Distribution Networks For Loss Reductioniraj214No ratings yet
- Use of Energy Storage To Reduce Transmission Losses in Meshed Power Distribution NetworksDocument20 pagesUse of Energy Storage To Reduce Transmission Losses in Meshed Power Distribution NetworksxuanthamdhqnNo ratings yet
- Optimization and Intelligent Techniques For Electrical VehicleDocument15 pagesOptimization and Intelligent Techniques For Electrical VehicleViswanathanBalajiNo ratings yet
- Reconfiguration With Simultaneous DG Installation To Improve The Voltage Profile in Distribution Network Using Harmony Search AlgorithmDocument12 pagesReconfiguration With Simultaneous DG Installation To Improve The Voltage Profile in Distribution Network Using Harmony Search AlgorithmLava KumarNo ratings yet
- GA-PSO Best RefrencesDocument10 pagesGA-PSO Best RefrencesSeid EndrisNo ratings yet
- A Fully Distributed Hierarchical Control Framework For Coordinated Operation of DERs in Active Distribution Power NetworksDocument14 pagesA Fully Distributed Hierarchical Control Framework For Coordinated Operation of DERs in Active Distribution Power NetworksVemalaiah KasiNo ratings yet
- Electric Power Systems ResearchDocument13 pagesElectric Power Systems ResearchsureshNo ratings yet
- DGAEJDocument28 pagesDGAEJNasir RehmanNo ratings yet
- Statistical Machine Learning Model For Capacitor Planning Considering Uncertainties in Photovoltaic PowerDocument13 pagesStatistical Machine Learning Model For Capacitor Planning Considering Uncertainties in Photovoltaic PowerbhaveshNo ratings yet
- CIRED2009 0518 PaperDocument4 pagesCIRED2009 0518 PapersrivaishnaviNo ratings yet
- Data-Light Physics-Informed Modeling for the Modulation Optimization of a Dual-Active-Bridge ConverterDocument15 pagesData-Light Physics-Informed Modeling for the Modulation Optimization of a Dual-Active-Bridge ConverterzzhbpainNo ratings yet
- Grid Connected PV System ThesisDocument5 pagesGrid Connected PV System Thesisafktlrreerdihj100% (2)
- Optimal Unit Commitment of Distributed Generation Resources Using Cuckoo Optimization AlgorithmDocument8 pagesOptimal Unit Commitment of Distributed Generation Resources Using Cuckoo Optimization Algorithmبشرى جودةNo ratings yet
- Optimal Unit Commitment of Distributed Generation Resources Using Cuckoo Optimization AlgorithmDocument8 pagesOptimal Unit Commitment of Distributed Generation Resources Using Cuckoo Optimization AlgorithmAli AlSowaidiNo ratings yet
- Index-Based Transmission For Distributed Generation in Voltage Stability and Loss Control Incorporating Optimization TechniqueDocument8 pagesIndex-Based Transmission For Distributed Generation in Voltage Stability and Loss Control Incorporating Optimization TechniqueIAES IJAINo ratings yet
- TSP_ENERGY_27821Document15 pagesTSP_ENERGY_27821Paran JothiNo ratings yet
- Complex PUDocument8 pagesComplex PUVinicius MunizNo ratings yet
- Modeling, Analysis, and Design of Multifunction Grid-Interfaced Inverters With Output LCL FilterDocument10 pagesModeling, Analysis, and Design of Multifunction Grid-Interfaced Inverters With Output LCL FilterEdsonNo ratings yet
- Using AC Optimal Power Flow For DG Planning and OptimisationDocument7 pagesUsing AC Optimal Power Flow For DG Planning and OptimisationAhmed WestministerNo ratings yet
- DG Placement and Sizing in Radial Distribution Network Using PSO&HBMO AlgorithmsDocument6 pagesDG Placement and Sizing in Radial Distribution Network Using PSO&HBMO AlgorithmsDrVikas Singh BhadoriaNo ratings yet
- Optimal Sizing and Sitting of Distributed Generations in Power Distribution Networks Using Firefly AlgorithmDocument14 pagesOptimal Sizing and Sitting of Distributed Generations in Power Distribution Networks Using Firefly AlgorithmAkansha SnehaNo ratings yet
- 1 s2.0 S0142061523002600 MainDocument10 pages1 s2.0 S0142061523002600 Maintonmoy hossainNo ratings yet
- B2 2 PDFDocument4 pagesB2 2 PDFKiranNo ratings yet
- EV Aug 2020Document15 pagesEV Aug 2020Akansha SnehaNo ratings yet
- Optimal Placement of Distributed Generation in Electric Distribution NetworksDocument5 pagesOptimal Placement of Distributed Generation in Electric Distribution NetworksIsaac OrtegaNo ratings yet
- Función Real Base PS Feb 07Document9 pagesFunción Real Base PS Feb 07freddyriveraNo ratings yet
- A Power Distribution Network Restoration Via Feeder Reconfiguration by Using Epso For Losses ReductionDocument5 pagesA Power Distribution Network Restoration Via Feeder Reconfiguration by Using Epso For Losses ReductionMohammed ShifulNo ratings yet
- Energy-Efficient Resource Allocation For OFDM-Based Cognitive Radio NetworksDocument11 pagesEnergy-Efficient Resource Allocation For OFDM-Based Cognitive Radio NetworkshabibNo ratings yet
- MS-993 Sara Ashfaq - Proof OK - 5-3-15Document7 pagesMS-993 Sara Ashfaq - Proof OK - 5-3-15SaraMuzaffarNo ratings yet
- Distributed Optimal Energy Management in MicrogridsDocument10 pagesDistributed Optimal Energy Management in MicrogridsFlorin NastasaNo ratings yet
- Distributed Power Loss Minimization in Micro GridsDocument11 pagesDistributed Power Loss Minimization in Micro GridsrajapandiyaNo ratings yet
- Energies 14 01084Document20 pagesEnergies 14 01084kanika ankitNo ratings yet
- Towards 5G: Context Aware Resource Allocation For Energy SavingDocument13 pagesTowards 5G: Context Aware Resource Allocation For Energy SavingOPTICALMIMOOFDMNo ratings yet
- SDN Based Optimal User Cooperation and Energy Efficient Resource Allocation in Cloud Assisted Heterogeneous NetworksDocument13 pagesSDN Based Optimal User Cooperation and Energy Efficient Resource Allocation in Cloud Assisted Heterogeneous NetworksElham AbbasiNo ratings yet
- Optimal Distributed Generation Placement Using Ant Colony OptimizationDocument6 pagesOptimal Distributed Generation Placement Using Ant Colony OptimizationPervez AhmadNo ratings yet
- Futureinternet 11 00012 With CoverDocument16 pagesFutureinternet 11 00012 With Coverزكريا الاهدلNo ratings yet
- Doi 10.1016 J.enconman.2006.04.022Document9 pagesDoi 10.1016 J.enconman.2006.04.022fong jeffNo ratings yet
- Fast Newton-Raphson Power Flow Analysis Based On Sparse Techniques and Parallel ProcessingDocument11 pagesFast Newton-Raphson Power Flow Analysis Based On Sparse Techniques and Parallel ProcessingMuhammad Kamran MustafaNo ratings yet
- Microgrid IntelligentDocument12 pagesMicrogrid IntelligentAymen1981No ratings yet
- Distribution System ReliabilityDocument8 pagesDistribution System Reliabilityabera alemayehuNo ratings yet
- Voltage/VAR Control in Distribution Networks Via Reactive Power Injection Through Distributed GeneratorsDocument9 pagesVoltage/VAR Control in Distribution Networks Via Reactive Power Injection Through Distributed Generatorsalessio8No ratings yet
- Sensors 22 05035Document21 pagesSensors 22 05035KavyaNo ratings yet
- Revised - Sizing - and - Siting - of - DSTATCOM - and PVsDocument15 pagesRevised - Sizing - and - Siting - of - DSTATCOM - and PVsGary ReyNo ratings yet
- Power Quality Improvement in Grid-Connected Photovoltaic-Fuel Cell Based Hybrid System Using Robust Maximum Power Point Tracking ControllerDocument17 pagesPower Quality Improvement in Grid-Connected Photovoltaic-Fuel Cell Based Hybrid System Using Robust Maximum Power Point Tracking ControllervishnuNo ratings yet
- Optimization of Distributed Generation Capacity For Line Loss Reduction and VoltageDocument9 pagesOptimization of Distributed Generation Capacity For Line Loss Reduction and VoltageCandra SaigustiaNo ratings yet
- Future Generation Computer Systems: Shilaja C. Arunprasath TDocument8 pagesFuture Generation Computer Systems: Shilaja C. Arunprasath TsistaLOAUREM SABAHNo ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Singapore - Tech Spec For SRD - Short Range DevicesDocument13 pagesSingapore - Tech Spec For SRD - Short Range DevicesneversubmittalNo ratings yet
- User Manual Readwell Touch Elisa Plate Analyser Ve - 5ac1cece1723dd45806d81faDocument84 pagesUser Manual Readwell Touch Elisa Plate Analyser Ve - 5ac1cece1723dd45806d81faCarlos ReisNo ratings yet
- Reply Daly BattrixxDocument40 pagesReply Daly Battrixxyogesh kumar jaiswalNo ratings yet
- TLP 434 LaipacTechnologyDocument1 pageTLP 434 LaipacTechnologychrisNo ratings yet
- BGR PSRRDocument3 pagesBGR PSRRsachin saxenaNo ratings yet
- MotoTRBO Programming Guide PDFDocument14 pagesMotoTRBO Programming Guide PDFSmartPTT89% (9)
- Microsoft Word - E003 Main QuizDocument6 pagesMicrosoft Word - E003 Main QuizwarrenronaldNo ratings yet
- 5G Network Technical Department Agenda: Key Features and TrendsDocument17 pages5G Network Technical Department Agenda: Key Features and TrendsMr LazyNo ratings yet
- Principles of Lighting in A BuildingDocument21 pagesPrinciples of Lighting in A BuildingGaffur BoliyaNo ratings yet
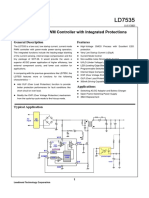
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDocument18 pagesGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNo ratings yet
- Vec 1180 KDocument35 pagesVec 1180 Kyu3zaNo ratings yet
- Satellite Communication Question PaperDocument2 pagesSatellite Communication Question PaperallanjwilsonNo ratings yet
- Laporan 1 Single PulseDocument17 pagesLaporan 1 Single Pulsecrisma juliantariNo ratings yet
- 32w300p Service Manual2 PDFDocument70 pages32w300p Service Manual2 PDFFakhri AliNo ratings yet
- Connector: 2.0mm Pitch/crimp Style Wire-To-Wire ConnectorsDocument2 pagesConnector: 2.0mm Pitch/crimp Style Wire-To-Wire ConnectorsMr. TNo ratings yet
- E740163 KX3 Owner's Man Rev C5Document58 pagesE740163 KX3 Owner's Man Rev C5Stephen FergusonNo ratings yet
- f2 Paper 2 Physics Term 3 PractiseDocument35 pagesf2 Paper 2 Physics Term 3 PractiseShepherd W NgwenyaNo ratings yet
- High Frequency Transistor for Amplifier ApplicationsDocument7 pagesHigh Frequency Transistor for Amplifier ApplicationsJose VelasquezNo ratings yet
- WEG Regulador de Tensao Grt7 Th4 10040217 Manual Portugues BRDocument50 pagesWEG Regulador de Tensao Grt7 Th4 10040217 Manual Portugues BRJuan I. Meza Lozano100% (1)
- Monopole & Dipole Antennas LabDocument8 pagesMonopole & Dipole Antennas LabSharjeel AsifNo ratings yet
- Chapter 10 - MLSDocument8 pagesChapter 10 - MLSEl Shazly SaidNo ratings yet
- Electrical ProductsDocument120 pagesElectrical Productswww.otomasyonegitimi.comNo ratings yet
- Trane Condensing UnitDocument16 pagesTrane Condensing Unitahmed abdelghanyNo ratings yet
- SRP-6MA (-HV) : Key FeaturesDocument2 pagesSRP-6MA (-HV) : Key FeaturesNanangDatadikJatimNo ratings yet
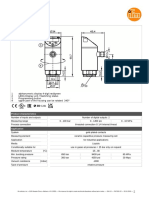
- PN7092 Pressure Sensor DisplayDocument5 pagesPN7092 Pressure Sensor DisplayEslam YehiaNo ratings yet
- Catalog Datacom Products Telebite 2006Document21 pagesCatalog Datacom Products Telebite 2006doddyNo ratings yet
- Electrical O&M ManualDocument28 pagesElectrical O&M ManualSopsky SalatNo ratings yet