You might also like
- Seminar III Report FinalDocument39 pagesSeminar III Report Finalganesh gundNo ratings yet
- 1 s2.0 S1877705814033979 MainDocument12 pages1 s2.0 S1877705814033979 Main20bme094No ratings yet
- Frequencydomainaveragingbasedexperimentalevaluationof Gear Fault Without Tachometer For Fluctuating Speed ConditionsDocument18 pagesFrequencydomainaveragingbasedexperimentalevaluationof Gear Fault Without Tachometer For Fluctuating Speed ConditionsPradeep KunduNo ratings yet
- Bearing Condition Monitoring Using Vibration SignatureDocument7 pagesBearing Condition Monitoring Using Vibration SignaturemarnalaNo ratings yet
- Condition monitoring techniques for detecting early-stage faults in power plant systemsDocument13 pagesCondition monitoring techniques for detecting early-stage faults in power plant systemsjerome okoyeNo ratings yet
- Statistical Condition Monitoring Based On Vibration SignalDocument10 pagesStatistical Condition Monitoring Based On Vibration Signalbrettharvey555No ratings yet
- ML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDocument19 pagesML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDEE MEMUNo ratings yet
- Cyclostationarity Approach For Monitoring Chatter and ToolDocument23 pagesCyclostationarity Approach For Monitoring Chatter and ToolAbdelkader RabahNo ratings yet
- ВибрацияDocument11 pagesВибрацияmaratova.m98No ratings yet
- Vibration Rotating EquipmentDocument17 pagesVibration Rotating EquipmentNiwrad EtagramNo ratings yet
- Motor Current Signature Analysis To Detect The Fault in Induction MotorDocument4 pagesMotor Current Signature Analysis To Detect The Fault in Induction MotorDalibor Markovic100% (1)
- Statistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsDocument9 pagesStatistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsJOEL EZEQUIEL PACHECO MENANo ratings yet
- Detecting Wind Turbine Gear Defects Using Sideband Energy Ratios (SERDocument11 pagesDetecting Wind Turbine Gear Defects Using Sideband Energy Ratios (SERtheerapat patkaewNo ratings yet
- Journal-Bearing Fault Detection Based On Vibration Analysis Using Feature Selection and Classification TechniquesDocument4 pagesJournal-Bearing Fault Detection Based On Vibration Analysis Using Feature Selection and Classification TechniquesNaveen ChodagiriNo ratings yet
- 1 s2.0 S0957417410009991 MainDocument8 pages1 s2.0 S0957417410009991 MainmatiasnNo ratings yet
- Fault Diagnosis in Gear Using Wavelet Envelope Power SpectrumDocument12 pagesFault Diagnosis in Gear Using Wavelet Envelope Power SpectrumKhalid F AbdulraheemNo ratings yet
- Materials Today: ProceedingsDocument6 pagesMaterials Today: ProceedingsVinod ThakurNo ratings yet
- Vibrational Diagnostics of Rotating Machinery Malfunctions AGNES MUSZYNSKADocument31 pagesVibrational Diagnostics of Rotating Machinery Malfunctions AGNES MUSZYNSKAtylerdurdane100% (1)
- Signal Fusion Based Deep Fast Random Forest Method - 2018 - Journal of ManufactuDocument8 pagesSignal Fusion Based Deep Fast Random Forest Method - 2018 - Journal of ManufactuSUNIL KUMARNo ratings yet
- Classification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionDocument9 pagesClassification of Ball Bearing Faults Using Vibro Acoustic Sensor Data FusionHanifNo ratings yet
- 1 PB OkDocument11 pages1 PB OkSuzanaPetrovicNo ratings yet
- Fault Detection in Induction Motor Using WPT and Multiple SVMDocument12 pagesFault Detection in Induction Motor Using WPT and Multiple SVMaerculanofNo ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Access 2017 2773460Document16 pagesAccess 2017 2773460captain americaNo ratings yet
- Sensors 20 03105 v2Document25 pagesSensors 20 03105 v2MarthandeNo ratings yet
- Frequency Phase Space Empirical Wavelet Transform For Rolling Bearings Fault DiagnosisDocument13 pagesFrequency Phase Space Empirical Wavelet Transform For Rolling Bearings Fault DiagnosisPraveen kumarNo ratings yet
- QUT Digital RepositoryDocument11 pagesQUT Digital RepositoryJose Luis RattiaNo ratings yet
- Main Bearing Fault Prognosis FFTDocument6 pagesMain Bearing Fault Prognosis FFTNamanNo ratings yet
- Expert: Rotating MachineryDocument13 pagesExpert: Rotating MachineryJolito RamosNo ratings yet
- Gear Systems 2Document11 pagesGear Systems 2IAEME PublicationNo ratings yet
- Tacholess Speed Estimation in Order Tracking A Review With Application To Rotating Machine Fault DiagnosisDocument18 pagesTacholess Speed Estimation in Order Tracking A Review With Application To Rotating Machine Fault DiagnosisDanielle GontijoNo ratings yet
- Measurement: T. Praveenkumar, B. Sabhrish, M. Saimurugan, K.I. RamachandranDocument10 pagesMeasurement: T. Praveenkumar, B. Sabhrish, M. Saimurugan, K.I. RamachandranAnthonyRivasNo ratings yet
- Eren Et Al-2018-Journal of Signal Processing SystemsDocument12 pagesEren Et Al-2018-Journal of Signal Processing SystemsIvana MilašNo ratings yet
- Edoc-Vibration Study and AnalysisDocument9 pagesEdoc-Vibration Study and AnalysisEl Comedor BenedictNo ratings yet
- A Review Paper On Vibration Monitoring of Lathe Ijariie12185Document5 pagesA Review Paper On Vibration Monitoring of Lathe Ijariie12185ASHWIN JAWAHARNo ratings yet
- Design and Implementation of An Extended Kalman Filter For The State Estimation of A Permanent Magnet Synchronous MotorDocument7 pagesDesign and Implementation of An Extended Kalman Filter For The State Estimation of A Permanent Magnet Synchronous Motor22dr0302No ratings yet
- Theoretical and Experimental Study of Rotor Bearing SystemsDocument9 pagesTheoretical and Experimental Study of Rotor Bearing SystemsIAEME PublicationNo ratings yet
- Vibration Analysis Techniques For Gearbox Diagnostic Are ViewDocument10 pagesVibration Analysis Techniques For Gearbox Diagnostic Are ViewVaibhav JainNo ratings yet
- Adli 2020Document6 pagesAdli 2020SurangaGNo ratings yet
- Compressor Health Monitoring Using IotDocument8 pagesCompressor Health Monitoring Using IotTJPRC PublicationsNo ratings yet
- Soualhi 23769 2Document16 pagesSoualhi 23769 2Max PainNo ratings yet
- 2018 TIE PreviewDocument3 pages2018 TIE PreviewrathanNo ratings yet
- Condition monitoring of SAI using statistical features and decision treesDocument6 pagesCondition monitoring of SAI using statistical features and decision treesjhon ortizNo ratings yet
- Roller Bearing Fault Diagnosis using Wavelet Transform SignaturesDocument14 pagesRoller Bearing Fault Diagnosis using Wavelet Transform SignaturesAbdelkader RabahNo ratings yet
- Vibration Analysis Techniques For Gearbox Diagnostic: A ReviewDocument10 pagesVibration Analysis Techniques For Gearbox Diagnostic: A ReviewBao-Phuc NguyenNo ratings yet
- Vibration response-based condition monitoring and fault diagnosis of rotary machineryDocument5 pagesVibration response-based condition monitoring and fault diagnosis of rotary machinerypeter.phamNo ratings yet
- Beraing Fault Detection Using CWT AVMDocument9 pagesBeraing Fault Detection Using CWT AVMLaiba GulNo ratings yet
- IEEE_ICPHM2023_V6Document7 pagesIEEE_ICPHM2023_V6ParvathyNo ratings yet
- 158 Ijmperdjun2019158Document14 pages158 Ijmperdjun2019158TJPRC PublicationsNo ratings yet
- Condition monitoring of rotating machinery through vibration analysisDocument5 pagesCondition monitoring of rotating machinery through vibration analysisEl Mehdi MakaveliNo ratings yet
- 83 - Detection of Bearing Fault Using Vibration Analysis and Controlling The VibrationsDocument12 pages83 - Detection of Bearing Fault Using Vibration Analysis and Controlling The VibrationsmaulikgadaraNo ratings yet
- ELK Asia Pacific Journals - Special Issue ISBN: 978-81-930411-4-7Document6 pagesELK Asia Pacific Journals - Special Issue ISBN: 978-81-930411-4-7ritesh_necNo ratings yet
- Ali SaadDocument6 pagesAli SaadEri SukocoNo ratings yet
- Deep Learning For The Detection of Machining Vibration ChatterDocument28 pagesDeep Learning For The Detection of Machining Vibration Chatterxh yanNo ratings yet
- Mechanical Systems and Signal Processing: Lingmi Zhang, Tong Wang, Yukio TamuraDocument13 pagesMechanical Systems and Signal Processing: Lingmi Zhang, Tong Wang, Yukio TamuraGiacomo EspositoNo ratings yet
- Vibration Analysis of Production Unit by Using Mechanical StethoscopeDocument67 pagesVibration Analysis of Production Unit by Using Mechanical Stethoscopek eswariNo ratings yet
- An Investigation On Gearbox Fault Detection Using Vibration Analysis Techniques: A ReviewDocument17 pagesAn Investigation On Gearbox Fault Detection Using Vibration Analysis Techniques: A ReviewMarthandeNo ratings yet
- Comparison of Machine Learning Algorithms For Induction MotorRotor SingleFault Diagnosis Using Stator Current SignalDocument6 pagesComparison of Machine Learning Algorithms For Induction MotorRotor SingleFault Diagnosis Using Stator Current SignalVelumani sNo ratings yet
- Spectral Analysis For Identifying Faults in Induction Motors by Means of SoundDocument5 pagesSpectral Analysis For Identifying Faults in Induction Motors by Means of SoundJuan Camilo Gomez SotoNo ratings yet
- Quiz - Exercise - Mini-Case Instructions InstructionsDocument1 pageQuiz - Exercise - Mini-Case Instructions InstructionskhabiranNo ratings yet
- CapmDocument3 pagesCapmkhabiranNo ratings yet
- Dio 22b. Sprečavanje Onečišćenja - Izmjene Jan 2021Document5 pagesDio 22b. Sprečavanje Onečišćenja - Izmjene Jan 2021Samo SpontanostNo ratings yet
- No. F-14-AAA-0000Document9 pagesNo. F-14-AAA-0000khabiranNo ratings yet
- 20120710ATT48612EN OriginalDocument16 pages20120710ATT48612EN OriginalkhabiranNo ratings yet
- Customer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustryDocument4 pagesCustomer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustrykhabiranNo ratings yet
- Review of Charterer and Owner Relationship PDFDocument15 pagesReview of Charterer and Owner Relationship PDFShanti Prakhar AwasthiNo ratings yet
- Landmark Facility Solutions - QuestionsDocument1 pageLandmark Facility Solutions - QuestionsFaig0% (1)
- DavorinDujmovic PaperDavorinDujmovicDocument10 pagesDavorinDujmovic PaperDavorinDujmovickhabiranNo ratings yet
- Ocean Internet-of-Things // Networked Blue Economy: C-Accel Track RecommendationDocument12 pagesOcean Internet-of-Things // Networked Blue Economy: C-Accel Track RecommendationkhabiranNo ratings yet
- ICS Rules & Regulations and GuidanceDocument2 pagesICS Rules & Regulations and GuidancekhabiranNo ratings yet
- Overview of Health, Safety and Environmental Regulation Relating To The Offshore Oil and Gas IndustryDocument16 pagesOverview of Health, Safety and Environmental Regulation Relating To The Offshore Oil and Gas IndustrykhabiranNo ratings yet
- HjlinjftsaiDocument13 pagesHjlinjftsaikhabiranNo ratings yet
- United Nations Industrial Development Organization: Single Workstation - Comfar Iii ExpertDocument1 pageUnited Nations Industrial Development Organization: Single Workstation - Comfar Iii ExpertkhabiranNo ratings yet
- Customer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustryDocument4 pagesCustomer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustrykhabiranNo ratings yet
- Project Management & Engineering Services To The Submarine Power Cable MarketDocument2 pagesProject Management & Engineering Services To The Submarine Power Cable MarketkhabiranNo ratings yet
- A Brief Review On Ndt&E Methods For Structural Aircraft ComponentsDocument9 pagesA Brief Review On Ndt&E Methods For Structural Aircraft ComponentskhabiranNo ratings yet
- Marine Safety Management Plan SummaryDocument37 pagesMarine Safety Management Plan Summarykhabiran100% (1)
- Numerical Simulation of Fluid Added Mass Effect On A Kaplan Turbine Runner With Experimental ValidationDocument9 pagesNumerical Simulation of Fluid Added Mass Effect On A Kaplan Turbine Runner With Experimental ValidationkhabiranNo ratings yet
- Nonlinear Analysis of Offshore Structures: Bjo RN Skallerud Jo Rgen AmdahlDocument1 pageNonlinear Analysis of Offshore Structures: Bjo RN Skallerud Jo Rgen AmdahlkhabiranNo ratings yet
- Shell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.EngDocument8 pagesShell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.Engkhabiran100% (1)
- A Brief Review On Ndt&E Methods For Structural Aircraft ComponentsDocument9 pagesA Brief Review On Ndt&E Methods For Structural Aircraft ComponentskhabiranNo ratings yet
- DNV GL Adv DP Verfication BC 3 2017Document1 pageDNV GL Adv DP Verfication BC 3 2017khabiranNo ratings yet
- Shell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.EngDocument8 pagesShell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.Engkhabiran100% (1)
- Innovatum Tone GeneratorDocument8 pagesInnovatum Tone GeneratorGleison PrateadoNo ratings yet
- On Design, Modelling, and Analysis of A 10-MW Medium-Speed Drivetrain For Offshore Wind TurbinesDocument1 pageOn Design, Modelling, and Analysis of A 10-MW Medium-Speed Drivetrain For Offshore Wind TurbineskhabiranNo ratings yet
- Orcaflex Standard Training Course Syllabus: Line TypesDocument3 pagesOrcaflex Standard Training Course Syllabus: Line TypeskhabiranNo ratings yet
- Service Note: ABB Solar Inverter Life Cycle ManagementDocument2 pagesService Note: ABB Solar Inverter Life Cycle ManagementkhabiranNo ratings yet
- Fuel consumption rates for generator sets by KVA capacityDocument1 pageFuel consumption rates for generator sets by KVA capacitykhabiranNo ratings yet
- Smallseotools 1617464053Document1 pageSmallseotools 1617464053khabiranNo ratings yet
- Army Public School RK Puram Secunderabad (202 - 21)Document1 pageArmy Public School RK Puram Secunderabad (202 - 21)Review ZodiacNo ratings yet
- Assignment 1 Sequence Series MathongoDocument4 pagesAssignment 1 Sequence Series MathongoNagireddy KalluriNo ratings yet
- Direct Proportionality - Basics - 2Document3 pagesDirect Proportionality - Basics - 2Sidra ShaikhNo ratings yet
- Domain and RangeDocument27 pagesDomain and RangeSowjanya GudimetlaNo ratings yet
- Discrete DistributionsDocument25 pagesDiscrete DistributionsMuhammad Asad SheikhNo ratings yet
- UG - Mathematics (Calculus and Linear Algebra) For Non-Computer Science Engineering Branches - EnglishDocument23 pagesUG - Mathematics (Calculus and Linear Algebra) For Non-Computer Science Engineering Branches - EnglishAMV SenpaiNo ratings yet
- Understand Percentages PowerpointDocument18 pagesUnderstand Percentages Powerpointjessamaevergara4456No ratings yet
- Similarity TransofmationDocument15 pagesSimilarity Transofmationsubbu205No ratings yet
- Republic of the Philippines 1st Quarterly Examination in Mathematics 7 S.Y. 2022-2023Document4 pagesRepublic of the Philippines 1st Quarterly Examination in Mathematics 7 S.Y. 2022-2023Lorelyn de la TorreNo ratings yet
- Cheat Sheet FOR Mathematics: RawatDocument12 pagesCheat Sheet FOR Mathematics: Rawatmadhav bhallaNo ratings yet
- 4024 s13 QP 12Document20 pages4024 s13 QP 12Ahmed JavedNo ratings yet
- Complex Numbers and Quadratic EquationsDocument25 pagesComplex Numbers and Quadratic EquationsRohith ChakkingalNo ratings yet
- CH 04Document43 pagesCH 04Shashwat JhaNo ratings yet
- Vtuupdates - Numerical Solution of PDEDocument39 pagesVtuupdates - Numerical Solution of PDEShanthi.VNo ratings yet
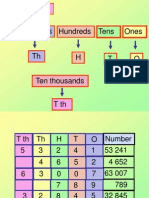
- 1.1 Place ValueDocument21 pages1.1 Place ValueRahayu KasmuNo ratings yet
- 0580 s12 QP 22Document12 pages0580 s12 QP 22Aryan RajputNo ratings yet
- F.Y.B.Sc-CS Stas-1 & 2 SyllabusDocument10 pagesF.Y.B.Sc-CS Stas-1 & 2 SyllabusRahul BhanushaliNo ratings yet
- 6-Properties of Trapezoids PDFDocument4 pages6-Properties of Trapezoids PDFKim Patrick VictoriaNo ratings yet
- UPT Cours GTV2Document37 pagesUPT Cours GTV2orjetaNo ratings yet
- CPSC 542f NotesDocument10 pagesCPSC 542f NotesSofia VegaNo ratings yet
- IEP Examples: Sample Present Levels, Progress Monitoring, GoalsDocument7 pagesIEP Examples: Sample Present Levels, Progress Monitoring, GoalsVan TotNo ratings yet
- Hypotenuse Opposite: 4th Grading Period AssessmentDocument2 pagesHypotenuse Opposite: 4th Grading Period AssessmentKate MassonNo ratings yet
- Trignometric Equations Maths NotesDocument29 pagesTrignometric Equations Maths NotesParthiv TrivediNo ratings yet
- Winkler's Single-Parameter Subgrade ModelDocument12 pagesWinkler's Single-Parameter Subgrade Modelsaman2580No ratings yet
- The Definite IntegralDocument7 pagesThe Definite IntegralPRIMONo ratings yet
- Linear ProgrammingDocument3 pagesLinear ProgrammingMuhammad Aftab AhmedNo ratings yet
- IB DP Math Portfolio Circles IB Math SL Portfolio +91 9868218719 Maths Type 2 IA Task Solution HelpDocument4 pagesIB DP Math Portfolio Circles IB Math SL Portfolio +91 9868218719 Maths Type 2 IA Task Solution HelpIb IaNo ratings yet
- GCo - Coursera Gamification Class - Week 1 ReviewDocument8 pagesGCo - Coursera Gamification Class - Week 1 ReviewIvan KuoNo ratings yet
- Sliding Mode Methods For Fault Detection and Fault Tolerant ControlDocument12 pagesSliding Mode Methods For Fault Detection and Fault Tolerant ControljopiterNo ratings yet
- Lecture9 - ES301 Engineering EconomicsDocument19 pagesLecture9 - ES301 Engineering EconomicsLory Liza Bulay-ogNo ratings yet