You might also like
- 2011SouzaArencibiaCostaPiratelli_Acontributiontothemeasurement_COBEM2011 (1)Document11 pages2011SouzaArencibiaCostaPiratelli_Acontributiontothemeasurement_COBEM2011 (1)Srimanthula SrikanthNo ratings yet
- 2011SouzaArencibiaCostaPiratelli_Acontributiontothemeasurement_COBEM2011 (1)Document11 pages2011SouzaArencibiaCostaPiratelli_Acontributiontothemeasurement_COBEM2011 (1)Srimanthula SrikanthNo ratings yet
- Zerilli–Armstrong constitutive 1-s2.0-S0167663615002550-mainDocument8 pagesZerilli–Armstrong constitutive 1-s2.0-S0167663615002550-mainSrimanthula SrikanthNo ratings yet
- Locking Arrangements For Nuts: Set ScrewsDocument6 pagesLocking Arrangements For Nuts: Set ScrewsSrimanthula SrikanthNo ratings yet
- BS Sample (R) QPDocument6 pagesBS Sample (R) QPSrimanthula SrikanthNo ratings yet
- A-combined-experimental-and-numerical-approach-that-eliminatesDocument12 pagesA-combined-experimental-and-numerical-approach-that-eliminatesSrimanthula SrikanthNo ratings yet
- LAMPA_MM_2020_MAREAUDocument33 pagesLAMPA_MM_2020_MAREAUSrimanthula SrikanthNo ratings yet
- Other Forms of Bolts and Nuts: Diameter D 30mm Square Headed Bolt With Square NeckDocument5 pagesOther Forms of Bolts and Nuts: Diameter D 30mm Square Headed Bolt With Square NeckSrimanthula SrikanthNo ratings yet
- metals-12-01787-v2Document15 pagesmetals-12-01787-v2Srimanthula SrikanthNo ratings yet
- III B.Tech I & II Semester Academic Calendar 2022-2023Document1 pageIII B.Tech I & II Semester Academic Calendar 2022-2023Srimanthula SrikanthNo ratings yet
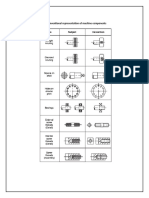
- Sheet No:02 Roll No: Title of The Drawing Sheet:: Conventional Representation of Machine ComponentsDocument3 pagesSheet No:02 Roll No: Title of The Drawing Sheet:: Conventional Representation of Machine ComponentsSrimanthula SrikanthNo ratings yet
- "Soft Skills: A Prerequisite For Phenomenal Growth": Pragati Engineering CollegeDocument1 page"Soft Skills: A Prerequisite For Phenomenal Growth": Pragati Engineering CollegeSrimanthula SrikanthNo ratings yet
- II I (R19) Regular Examinations March 2021Document1 pageII I (R19) Regular Examinations March 2021Srimanthula SrikanthNo ratings yet
- Iii-I Mid-Ii Time Table Feb-2021Document1 pageIii-I Mid-Ii Time Table Feb-2021Srimanthula SrikanthNo ratings yet
- LAB Master SetDocument7 pagesLAB Master SetSrimanthula SrikanthNo ratings yet
- Combined Geo-Scientist Examination, 2020Document35 pagesCombined Geo-Scientist Examination, 2020Srimanthula SrikanthNo ratings yet
- Iii-I Mid-Ii Time Table Feb-2021Document1 pageIii-I Mid-Ii Time Table Feb-2021Srimanthula SrikanthNo ratings yet
- FCI Recruitment 2021 for 89 VacanciesDocument33 pagesFCI Recruitment 2021 for 89 VacanciesvijaythealmightyNo ratings yet
- Guide LinesDocument6 pagesGuide LinesDevaraju ThangellamudiNo ratings yet
- IV-i Regular Supple Examinations March 2021Document2 pagesIV-i Regular Supple Examinations March 2021Srimanthula SrikanthNo ratings yet
- III-I (R16) Regular Supple Examinations March 2021Document1 pageIII-I (R16) Regular Supple Examinations March 2021Srimanthula SrikanthNo ratings yet
- II-I (R16) Supple Examinations March-2021Document1 pageII-I (R16) Supple Examinations March-2021Srimanthula SrikanthNo ratings yet
- Name Change Correction Form PDFDocument1 pageName Change Correction Form PDFSrimanthula SrikanthNo ratings yet
- Mechanical Engineering Conference Abstracts and EventsDocument10 pagesMechanical Engineering Conference Abstracts and EventsSrimanthula SrikanthNo ratings yet
- Learn Python Programming Basics in 12 StepsDocument3 pagesLearn Python Programming Basics in 12 StepsSrimanthula SrikanthNo ratings yet
- GRAMA/WARD SACHIVALAYAM RECRUITMENT MERITLISTDocument109 pagesGRAMA/WARD SACHIVALAYAM RECRUITMENT MERITLISTSrimanthula SrikanthNo ratings yet
- Learn Python Programming Basics in 12 StepsDocument3 pagesLearn Python Programming Basics in 12 StepsSrimanthula SrikanthNo ratings yet
- FEA Questions & Answers: Everything about Finite Element AnalysisDocument20 pagesFEA Questions & Answers: Everything about Finite Element AnalysisJoseph BurnettNo ratings yet
- Combined Geo-Scientist Examination, 2020Document35 pagesCombined Geo-Scientist Examination, 2020Srimanthula SrikanthNo ratings yet
- M.tech I Sem Time Table Jan - 2019Document2 pagesM.tech I Sem Time Table Jan - 2019Srimanthula SrikanthNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Properties of Matter Test Pre Assessment Standard 6Document4 pagesProperties of Matter Test Pre Assessment Standard 6api-261868573No ratings yet
- 2022 DecDocument15 pages2022 DecKT ChanNo ratings yet
- Physics Form 4 Chapter 2.9Document15 pagesPhysics Form 4 Chapter 2.9Farain RashdiNo ratings yet
- Newton's Laws LessonDocument24 pagesNewton's Laws LessonArgel Panganiban DalwampoNo ratings yet
- UNIT 12-PHY 131-Chapter 17-Electric PotentialDocument32 pagesUNIT 12-PHY 131-Chapter 17-Electric PotentialcharlieNo ratings yet
- Engineering Mechanics - Midterm - AnswersheetDocument8 pagesEngineering Mechanics - Midterm - AnswersheetfebwinNo ratings yet
- Introductory Chemistry An Active Learning Approach 6th Edition Cracolice Test BankDocument17 pagesIntroductory Chemistry An Active Learning Approach 6th Edition Cracolice Test Banka5563409580% (1)
- Answer: ADocument6 pagesAnswer: AAduchelab AdamsonuniversityNo ratings yet
- Science and Health VDocument59 pagesScience and Health VMichael Joseph SantosNo ratings yet
- PH2100 Final Exam InstructionsDocument13 pagesPH2100 Final Exam InstructionsAnonymous L21MIUqANo ratings yet
- Double Flexing Coupling and Floating Shaft Coupling: E4 E5 EB E6Document3 pagesDouble Flexing Coupling and Floating Shaft Coupling: E4 E5 EB E6Agustinus WaluyoNo ratings yet
- Work, Energy and Power ExplainedDocument29 pagesWork, Energy and Power ExplainedAnju MohtaNo ratings yet
- CH 12 Study GuideDocument2 pagesCH 12 Study Guidetownsenr94No ratings yet
- Projectile Motion LectureDocument30 pagesProjectile Motion LectureherawatiNo ratings yet
- Science6 Q3 Mod2 CalagoDocument12 pagesScience6 Q3 Mod2 CalagoMark Joseph TimpleNo ratings yet
- Revision Notes Grade 11Document3 pagesRevision Notes Grade 11anuelisajoseNo ratings yet
- Motion in One Dimension TestDocument2 pagesMotion in One Dimension Testabdullah naseerNo ratings yet
- Schmidt Rebound Hammer TestDocument3 pagesSchmidt Rebound Hammer Testh4m0n4ng4nNo ratings yet
- Midterm Exam - HydraulicsDocument1 pageMidterm Exam - HydraulicsGhiovani DayananNo ratings yet
- FIITJEE PUNE PRACTICE SET ON UNITS & DIMENSIONSDocument1 pageFIITJEE PUNE PRACTICE SET ON UNITS & DIMENSIONSAmeya KanunjeNo ratings yet
- Archimides' PrincipleDocument2 pagesArchimides' PrincipleAna Gabriel Lopez NevarezNo ratings yet
- XII Physics Chapter 6 - Electrictromagnetic Induction Saju HssliveDocument7 pagesXII Physics Chapter 6 - Electrictromagnetic Induction Saju HssliveAnonymous UvfhjQE7ZfNo ratings yet
- DNV-RP-H102 Marine Operations During Removal of Offshore Installations April 2004Document22 pagesDNV-RP-H102 Marine Operations During Removal of Offshore Installations April 2004TroyNo ratings yet
- The Moon Has No GravityDocument2 pagesThe Moon Has No GravityDovydas AlejūnasNo ratings yet
- On Unifying The Concepts of Scale, Instrumentation, and Stochastics in The Development of Multiphase Transport TheoryDocument9 pagesOn Unifying The Concepts of Scale, Instrumentation, and Stochastics in The Development of Multiphase Transport TheoryBruno Jose VicenteNo ratings yet
- Cap1B. IGCSE Practice Exam QuestionsDocument5 pagesCap1B. IGCSE Practice Exam QuestionsJavier R. TrigosoNo ratings yet
- DPP#5 Circular Motion SolutionDocument10 pagesDPP#5 Circular Motion SolutionADARSH KUMAR BEHERANo ratings yet
- What is the Rebound Hammer TestDocument8 pagesWhat is the Rebound Hammer TestEvello MercanoNo ratings yet
- APhO2001 Theory Prob 1Document3 pagesAPhO2001 Theory Prob 1Hermawan MulyonoNo ratings yet