You might also like
- CG Pulsera Con Nombre Letras-DiagramaDocument1 pageCG Pulsera Con Nombre Letras-DiagramaJaime Gaska Fumanchemo Lsa63% (8)
- Gregory Philippa - Tudor 03 - La Trampa DoradaDocument458 pagesGregory Philippa - Tudor 03 - La Trampa Doradagraceandre55100% (1)
- Gregory Philippa - Tudor 03 - La Trampa DoradaDocument458 pagesGregory Philippa - Tudor 03 - La Trampa Doradagraceandre55100% (1)
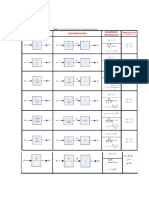
- Funciones de TransferenciaDocument7 pagesFunciones de Transferenciagraceandre55No ratings yet
- Modulo1 - Sector Electrico 2Document29 pagesModulo1 - Sector Electrico 2graceandre55No ratings yet
- Funciones de TransferenciaDocument7 pagesFunciones de Transferenciagraceandre55No ratings yet
- Practica No. 07Document6 pagesPractica No. 07Paul GuacanNo ratings yet
- Viento RadiaciónDocument66 pagesViento Radiacióngraceandre55No ratings yet
- Dinamica Inf3Document4 pagesDinamica Inf3graceandre55No ratings yet
- Estudiando La Oscuridad - Sergio HovelDocument87 pagesEstudiando La Oscuridad - Sergio Hovelgraceandre5567% (3)
- 46b. - Estrategias de Posicionamiento de Mercado para Un Estudio FotográficoDocument24 pages46b. - Estrategias de Posicionamiento de Mercado para Un Estudio FotográficoAided Lopmart100% (1)
- Estudiando La Oscuridad - Sergio HovelDocument87 pagesEstudiando La Oscuridad - Sergio Hovelgraceandre5567% (3)
- CapacitoresDocument5 pagesCapacitorescrossXIIINo ratings yet
- Estrategias y Tacticas de MarketingDocument79 pagesEstrategias y Tacticas de MarketingManuel Fuertes100% (2)
- Spencer Johnson - El PresenteDocument61 pagesSpencer Johnson - El PresenteOivalf Nocip50% (4)
- Spencer Johnson - El PresenteDocument61 pagesSpencer Johnson - El PresenteOivalf Nocip50% (4)
- Endurecimiento Por DeformaciónDocument4 pagesEndurecimiento Por DeformaciónJuanPerezNo ratings yet
- Ficha N°1 Eda2Document1 pageFicha N°1 Eda2Ronald Salinas soriaNo ratings yet
- Tecnicas Monitoreo Calidad Aire PDFDocument20 pagesTecnicas Monitoreo Calidad Aire PDFJJONEVERNo ratings yet
- Rotación Alrededor de Un Eje FijoDocument4 pagesRotación Alrededor de Un Eje FijoAnder ZeballosNo ratings yet
- Completo Fisicoquimica IIDocument3 pagesCompleto Fisicoquimica IIKATHERINE LUCIA REVOLLAR CASASNo ratings yet
- Ondas y Vibraciones Trabajop GrupalDocument10 pagesOndas y Vibraciones Trabajop GrupalTänîä ĆäńdöNo ratings yet
- Historia de Los Principales Físicos: Contenid ODocument27 pagesHistoria de Los Principales Físicos: Contenid OLUPE HUANCA CHALCONo ratings yet
- U2 ÓpticaDocument65 pagesU2 ÓpticaGIOVANNI EVERARDO GARCIA GARCIANo ratings yet
- Práctica 8-2da. Ley de Newton (Asignación)Document4 pagesPráctica 8-2da. Ley de Newton (Asignación)Lis MorantesNo ratings yet
- El PlanímetroDocument10 pagesEl PlanímetroJose Omar Mena PomaNo ratings yet
- Empuje y Estabilidad 1S2021Document11 pagesEmpuje y Estabilidad 1S2021pabloNo ratings yet
- Normas Siget ViviendaDocument39 pagesNormas Siget ViviendaGabby BenitezNo ratings yet
- Zoo CósmicoDocument15 pagesZoo CósmicoMuseo Elder de la Ciencia y la TecnologíaNo ratings yet
- Prevencion de Riesgos LaboralesDocument66 pagesPrevencion de Riesgos LaboralesMarlon AlarconNo ratings yet
- Adiccion de VectoresDocument12 pagesAdiccion de Vectoresangelica villaloboNo ratings yet
- Aproximación LinealDocument6 pagesAproximación Linealgracielaandreani1580100% (3)
- Informe 1 ElectrostáticaDocument9 pagesInforme 1 ElectrostáticaTheDroidDrummerNo ratings yet
- Medición de La Calidad de La Energía EléctricaDocument22 pagesMedición de La Calidad de La Energía EléctricaMaria de GpeNo ratings yet
- Plan de Mejoramiento FISICA GRADO 10 - 1er PeriodoDocument3 pagesPlan de Mejoramiento FISICA GRADO 10 - 1er PeriodoMauricio Javier Acosta SolerNo ratings yet
- Investigar El Método de Paralelogramo en VectoresDocument4 pagesInvestigar El Método de Paralelogramo en VectoresGonzález camacho Julio cesarNo ratings yet
- Acumulador de Orgón - ManualDocument6 pagesAcumulador de Orgón - Manualelnarigazo100% (2)
- OPCION2 Actividad FinalDocument2 pagesOPCION2 Actividad FinalhppaulalexNo ratings yet
- Ideas PrincipalesDocument26 pagesIdeas PrincipalesHilary MaNo ratings yet
- Ejercicios Resueltos HidrostaticaDocument27 pagesEjercicios Resueltos HidrostaticaMarilyn Alva75% (4)
- Guia Nº1 Repaso (Conversion, Vectores, Circunferencia)Document4 pagesGuia Nº1 Repaso (Conversion, Vectores, Circunferencia)Castillo AnaNo ratings yet
- Mecánica de Las Estructuras - G Pirard - TeoricoDocument286 pagesMecánica de Las Estructuras - G Pirard - TeoricoTheFrander8No ratings yet
- Hoja Guia1 DAV2021Document7 pagesHoja Guia1 DAV2021Nikol Damito Fruticas100% (1)
- LabsresumenDocument5 pagesLabsresumenFabian Mauriciano Farfan BertinNo ratings yet
- Informe-Traccion .........Document48 pagesInforme-Traccion .........Fernanda MorenoNo ratings yet
- Informe Gases FisicoquimicaDocument25 pagesInforme Gases FisicoquimicaMaricielo Flores MarquesNo ratings yet