You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Semiconductor Device CalculationsDocument37 pagesSemiconductor Device Calculationsbhasin_hemantNo ratings yet
- Top Malls in Chennai CityDocument8 pagesTop Malls in Chennai CityNavin ChandarNo ratings yet
- L14 2 f09Document34 pagesL14 2 f09Hari BabuNo ratings yet
- Midterm 2011Document3 pagesMidterm 2011bhasin_hemantNo ratings yet
- RNMCDocument4 pagesRNMCbhasin_hemantNo ratings yet
- High Resolution 12 Bit Segmented Capacitor DAC in Successive Approximation ADCDocument4 pagesHigh Resolution 12 Bit Segmented Capacitor DAC in Successive Approximation ADCbhasin_hemantNo ratings yet
- Analysis of Charge-Pump Phase-Locked LoopsDocument10 pagesAnalysis of Charge-Pump Phase-Locked Loopsbhasin_hemantNo ratings yet
- Midterm 2013Document3 pagesMidterm 2013bhasin_hemantNo ratings yet
- Iscas06 LCDocument4 pagesIscas06 LCbhasin_hemantNo ratings yet
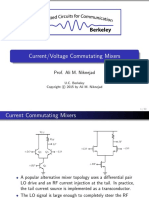
- Lect22 IV MixersDocument50 pagesLect22 IV Mixersbhasin_hemantNo ratings yet
- Capless LDO DESIGNDocument6 pagesCapless LDO DESIGNbhasin_hemantNo ratings yet
- Midterm 2005Document3 pagesMidterm 2005bhasin_hemantNo ratings yet
- Time Interleaved AdcDocument11 pagesTime Interleaved Adcbhasin_hemantNo ratings yet
- Midterm 2009Document4 pagesMidterm 2009bhasin_hemantNo ratings yet
- Thermal Noise in SC CircuitsDocument22 pagesThermal Noise in SC Circuitsbhasin_hemantNo ratings yet
- Simulink Behavioral Modeling of A 10-Bit Pipelined ADCDocument9 pagesSimulink Behavioral Modeling of A 10-Bit Pipelined ADCbhasin_hemantNo ratings yet
- Good DocumentDocument3 pagesGood Documentbhasin_hemantNo ratings yet
- Pipeline Adc ThesisDocument177 pagesPipeline Adc Thesisbhasin_hemant100% (1)
- 2012 Zhang MascDocument77 pages2012 Zhang Mascbhasin_hemantNo ratings yet
- Good DocumentDocument3 pagesGood Documentbhasin_hemantNo ratings yet
- ThesisDocument157 pagesThesisbhasin_hemantNo ratings yet
- PHDDocument184 pagesPHDbhasin_hemantNo ratings yet
- Jitter RingDocument15 pagesJitter RingJiaxiang LiuNo ratings yet
- ThesisDocument157 pagesThesisbhasin_hemantNo ratings yet
- Circuits and Algorithms for Pipelined ADCs in Scaled CMOS TechnologiesDocument184 pagesCircuits and Algorithms for Pipelined ADCs in Scaled CMOS Technologiesbhasin_hemantNo ratings yet
- Jitter RingDocument15 pagesJitter RingJiaxiang LiuNo ratings yet
- HW03 Solutions BoserDocument20 pagesHW03 Solutions Boserbhasin_hemantNo ratings yet
- Maneatis 93 BDocument10 pagesManeatis 93 Bbhasin_hemantNo ratings yet
- Accuracy Limitations of Pipelined Adcs: Clk2, C V V DV V V V V V V C CDocument4 pagesAccuracy Limitations of Pipelined Adcs: Clk2, C V V DV V V V V V V C Cbhasin_hemantNo ratings yet
- 3 - Performance Measurement of Mining Equipments by Utilizing OEEDocument8 pages3 - Performance Measurement of Mining Equipments by Utilizing OEEGonzalo GarciaNo ratings yet
- 8dd8 P2 Program Food MFG Final PublicDocument19 pages8dd8 P2 Program Food MFG Final PublicNemanja RadonjicNo ratings yet
- Software Requirements Specification: Chaitanya Bharathi Institute of TechnologyDocument20 pagesSoftware Requirements Specification: Chaitanya Bharathi Institute of TechnologyHima Bindhu BusireddyNo ratings yet
- PLC Networking with Profibus and TCP/IP for Industrial ControlDocument12 pagesPLC Networking with Profibus and TCP/IP for Industrial Controltolasa lamessaNo ratings yet
- SQL Guide AdvancedDocument26 pagesSQL Guide AdvancedRustik2020No ratings yet
- Log File Records Startup Sequence and Rendering CallsDocument334 pagesLog File Records Startup Sequence and Rendering CallsKossay BelkhammarNo ratings yet
- Guidelines On Occupational Safety and Health in Construction, Operation and Maintenance of Biogas Plant 2016Document76 pagesGuidelines On Occupational Safety and Health in Construction, Operation and Maintenance of Biogas Plant 2016kofafa100% (1)
- IoT BASED HEALTH MONITORING SYSTEMDocument18 pagesIoT BASED HEALTH MONITORING SYSTEMArunkumar Kuti100% (2)
- Evolution of Bluetooth PDFDocument2 pagesEvolution of Bluetooth PDFJuzerNo ratings yet
- 3ccc PDFDocument20 pages3ccc PDFKaka KunNo ratings yet
- Decision Maths 1 AlgorithmsDocument7 pagesDecision Maths 1 AlgorithmsNurul HafiqahNo ratings yet
- PointerDocument26 pagesPointerpravin2mNo ratings yet
- Account Statement From 30 Jul 2018 To 30 Jan 2019Document8 pagesAccount Statement From 30 Jul 2018 To 30 Jan 2019Bojpuri OfficialNo ratings yet
- ABP - IO Implementing - Domain - Driven - DesignDocument109 pagesABP - IO Implementing - Domain - Driven - DesignddoruNo ratings yet
- Leaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeDocument6 pagesLeaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeAnonymous iTNFz0a0No ratings yet
- KSEB Liable to Pay Compensation for Son's Electrocution: Kerala HC CaseDocument18 pagesKSEB Liable to Pay Compensation for Son's Electrocution: Kerala HC CaseAkhila.ENo ratings yet
- En dx300lc 5 Brochure PDFDocument24 pagesEn dx300lc 5 Brochure PDFsaroniNo ratings yet
- New Education Policy 2019Document55 pagesNew Education Policy 2019Aakarshanam VenturesNo ratings yet
- HCW22 PDFDocument4 pagesHCW22 PDFJerryPNo ratings yet
- Last Clean ExceptionDocument24 pagesLast Clean Exceptionbeom choiNo ratings yet
- GlastonburyDocument4 pagesGlastonburyfatimazahrarahmani02No ratings yet
- Evaluating Sources IB Style: Social 20ib Opvl NotesDocument7 pagesEvaluating Sources IB Style: Social 20ib Opvl NotesRobert ZhangNo ratings yet
- GROSS DOMESTIC PRODUCT STATISTICS (Report) - Powerpoint PresentationDocument37 pagesGROSS DOMESTIC PRODUCT STATISTICS (Report) - Powerpoint PresentationCyryhl GutlayNo ratings yet
- Books of AccountsDocument18 pagesBooks of AccountsFrances Marie TemporalNo ratings yet
- The Ultimate Advanced Family PDFDocument39 pagesThe Ultimate Advanced Family PDFWandersonNo ratings yet
- Thin Film Deposition TechniquesDocument20 pagesThin Film Deposition TechniquesShayan Ahmad Khattak, BS Physics Student, UoPNo ratings yet
- DIN Flange Dimensions PDFDocument1 pageDIN Flange Dimensions PDFrasel.sheikh5000158No ratings yet
- Lifespan Development Canadian 6th Edition Boyd Test BankDocument57 pagesLifespan Development Canadian 6th Edition Boyd Test Bankshamekascoles2528zNo ratings yet
- How Psychology Has Changed Over TimeDocument2 pagesHow Psychology Has Changed Over TimeMaedot HaddisNo ratings yet