You might also like
- PHYS 102 First Lecture August 5, 2020 PDFDocument24 pagesPHYS 102 First Lecture August 5, 2020 PDFUtsav PathakNo ratings yet
- Lecture Guide in Vector AnalysisDocument10 pagesLecture Guide in Vector AnalysisAnonymous KbUDRGqRKNo ratings yet
- Electromagnetic Fields and WavesDocument138 pagesElectromagnetic Fields and WavesSreejaNo ratings yet
- Unit 1 - Electromagnetic Field Theory - WWW - Rgpvnotes.inDocument35 pagesUnit 1 - Electromagnetic Field Theory - WWW - Rgpvnotes.inHimanshu PatelNo ratings yet
- Continuum Mechanics: Concise Theory and ProblemsFrom EverandContinuum Mechanics: Concise Theory and ProblemsRating: 3.5 out of 5 stars3.5/5 (3)
- Lecture Guide in Vector AnalysisDocument13 pagesLecture Guide in Vector AnalysiskennethNo ratings yet
- 29Document10 pages29physicsdocsNo ratings yet
- Chap IDocument56 pagesChap ICybertron BadeeNo ratings yet
- Electromagnetic Fields and Waves (Module 1)Document46 pagesElectromagnetic Fields and Waves (Module 1)Usama AuwalNo ratings yet
- Electromagnetics Week 1Document10 pagesElectromagnetics Week 1john jkillerzsNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Electromagnetic Fields and WavesDocument96 pagesElectromagnetic Fields and WavesTrevor100% (1)
- EMF Revision Notes: CompulsoryDocument17 pagesEMF Revision Notes: CompulsoryShootingStarPhotonsNo ratings yet
- Jinka University Physics Module Provides Foundation in Key ConceptsDocument125 pagesJinka University Physics Module Provides Foundation in Key ConceptsBelete Degu100% (3)
- phys lab 123 expt 6-9Document27 pagesphys lab 123 expt 6-9예지No ratings yet
- MP EM Ass 25: Radiation Energy and MomentumDocument9 pagesMP EM Ass 25: Radiation Energy and MomentumBlueAstro100% (2)
- Physics 003 Chapter 1 Vectors and Vector AdditionDocument5 pagesPhysics 003 Chapter 1 Vectors and Vector AdditionAngel Lou LiwagonNo ratings yet
- General Physics IDocument12 pagesGeneral Physics IPaul WarrenNo ratings yet
- MP EM Ass 16: Biot-Savart LawDocument14 pagesMP EM Ass 16: Biot-Savart LawBlueAstro63% (8)
- Physics 370 Final Exam Solution Hints GuideDocument13 pagesPhysics 370 Final Exam Solution Hints GuideΧρίστος ΠαπαναστασίουNo ratings yet
- 1.3 Vectors & Scalars Notes V2Document9 pages1.3 Vectors & Scalars Notes V2feeyonahNo ratings yet
- MP EM Ass 3: Electric Field Lines and DipolesDocument10 pagesMP EM Ass 3: Electric Field Lines and DipolesBlueAstroNo ratings yet
- Berg Uncertainty PrincipleDocument20 pagesBerg Uncertainty PrincipleSiddhi Nitin Mahajan0% (1)
- MP EM Ass 6: Electric PotentialDocument15 pagesMP EM Ass 6: Electric PotentialBlueAstroNo ratings yet
- Exam 3 Study Guide: 1 Best-Case Scenario: You Know Exactly What and How To StudyDocument8 pagesExam 3 Study Guide: 1 Best-Case Scenario: You Know Exactly What and How To StudyJames trippNo ratings yet
- CH - 4 - Part IIIDocument19 pagesCH - 4 - Part IIIBAHARUDIN BURAHNo ratings yet
- Solutions) Mastering Physics HW11Document7 pagesSolutions) Mastering Physics HW11jamie_heineckeNo ratings yet
- Statistical Physics Homework SolutionsDocument8 pagesStatistical Physics Homework Solutionsgomuzefoweg3100% (1)
- Electric Force and Flux Learning PackageDocument7 pagesElectric Force and Flux Learning PackageMark Cherlit AparreNo ratings yet
- Vectors: Vectors and Their ComponentsDocument22 pagesVectors: Vectors and Their ComponentsdrfefvdsfNo ratings yet
- E01 Electric Field PDFDocument11 pagesE01 Electric Field PDFJoseph Lawrence CelesteNo ratings yet
- 10 Physics t2 sp08 220516 103652Document9 pages10 Physics t2 sp08 220516 103652Kshitij RanjanNo ratings yet
- As Level Physics Revision Guide For OCRDocument44 pagesAs Level Physics Revision Guide For OCRThomas Roe100% (1)
- Lesson Plan Ohms LawDocument4 pagesLesson Plan Ohms Lawjoice samonte100% (1)
- Vectors and Vector FunctionsDocument44 pagesVectors and Vector FunctionsSafi FouadNo ratings yet
- PHYS320 Week 4 Homework AnswersDocument9 pagesPHYS320 Week 4 Homework AnswersWesNamtrow100% (1)
- 32Document11 pages32Adam BoltronNo ratings yet
- 1 emDocument54 pages1 emDr. Neha KondalNo ratings yet
- Physics 152 SI Midterm I ReviewDocument7 pagesPhysics 152 SI Midterm I ReviewMina GergesNo ratings yet
- Elements of Electromagnetics Third Edition E Book Chapter 01Document26 pagesElements of Electromagnetics Third Edition E Book Chapter 01Yepuru ChaithanyaNo ratings yet
- Learner Support Grade 11 For 2021 1Document73 pagesLearner Support Grade 11 For 2021 1Joyce ChikwaNo ratings yet
- Module 6 ElectricityDocument13 pagesModule 6 ElectricityKate EvangelistaNo ratings yet
- Lab PrepDocument5 pagesLab PrepishanNo ratings yet
- Ch01 Lecture02Document27 pagesCh01 Lecture02علي عبداللهNo ratings yet
- MP EM Ass 2: Electric FieldsDocument8 pagesMP EM Ass 2: Electric FieldsBlueAstro100% (1)
- Lab Act 3 - VectorsDocument8 pagesLab Act 3 - VectorsJudy Mae OmanioNo ratings yet
- E06 Magnetic Force v01Document4 pagesE06 Magnetic Force v01Abdulla ZaabiNo ratings yet
- PHY 109: Electromagnetic Theory: Topic 1 Introduction To Scalar and Vector FieldDocument48 pagesPHY 109: Electromagnetic Theory: Topic 1 Introduction To Scalar and Vector Fieldmiriyala nagendraNo ratings yet
- SHS Gen. Physics1 MELC 8 10 Week 2Document16 pagesSHS Gen. Physics1 MELC 8 10 Week 2Princess AlasNo ratings yet
- Leacture Notes Unit 1 1 112Document112 pagesLeacture Notes Unit 1 1 112keregiNo ratings yet
- Vector Analysis: 1.1 Scalars and VectorsDocument9 pagesVector Analysis: 1.1 Scalars and VectorsJoel DsouzaNo ratings yet
- Vector Analysis: 1.1 Scalars and VectorsDocument9 pagesVector Analysis: 1.1 Scalars and VectorsJoel DsouzaNo ratings yet
- Vector Analysis: 1.1 Scalars and VectorsDocument9 pagesVector Analysis: 1.1 Scalars and VectorsJoel DsouzaNo ratings yet
- Open ES-1-Handout 2Document61 pagesOpen ES-1-Handout 2JANINA CHRISTELLE ORMITANo ratings yet
- Geometric method determines electric field direction of charged line segmentDocument8 pagesGeometric method determines electric field direction of charged line segmentIbraheem OlugbadeNo ratings yet
- Chapter 13 Homework Solutions PhysicsDocument5 pagesChapter 13 Homework Solutions Physicsgiorcmapd100% (1)
- Modern Electromagnetic Scattering Theory with ApplicationsFrom EverandModern Electromagnetic Scattering Theory with ApplicationsRating: 4 out of 5 stars4/5 (1)
- MarquadtDocument3 pagesMarquadtPesta SigalinggingNo ratings yet
- Latihan SoalDocument49 pagesLatihan SoalPesta SigalinggingNo ratings yet
- 14 TM and TE Modes: 14.1 Rectangular WaveguidesDocument10 pages14 TM and TE Modes: 14.1 Rectangular WaveguidesPesta SigalinggingNo ratings yet
- LMSPDocument7 pagesLMSPPesta SigalinggingNo ratings yet
- Ece 3324 Notes 10Document45 pagesEce 3324 Notes 10Andre Francois ThunotNo ratings yet
- K P (Document2 pagesK P (Pesta SigalinggingNo ratings yet
- Tenses TableDocument5 pagesTenses Tableapi-314670535No ratings yet
- Algorithm for Estimating Nonlinear ParametersDocument11 pagesAlgorithm for Estimating Nonlinear ParametersPesta SigalinggingNo ratings yet
- Pemodelan Inversi Non-Linear Dengan Pendekatan Linear: Pesta Indra Sigalingging, WahyuDocument8 pagesPemodelan Inversi Non-Linear Dengan Pendekatan Linear: Pesta Indra Sigalingging, WahyuPesta SigalinggingNo ratings yet
- Taylor Series ExpansionDocument4 pagesTaylor Series ExpansionPesta SigalinggingNo ratings yet
- Snipping Tool Print JobDocument1 pageSnipping Tool Print JobPesta SigalinggingNo ratings yet
- Pengenalan Gempa BumiDocument5 pagesPengenalan Gempa BumiPesta SigalinggingNo ratings yet
- Amount of Substance 4: © WWW - CHEMSHEETS.co - Uk 08-April-2020 Chemsheets AS 1247 1Document4 pagesAmount of Substance 4: © WWW - CHEMSHEETS.co - Uk 08-April-2020 Chemsheets AS 1247 1Ahmad RazaNo ratings yet
- 6433d44f15dfdb0019eefa60 - ## - Lecture Planner - Chemistry - (Pathshala 12th JEE 2024)Document2 pages6433d44f15dfdb0019eefa60 - ## - Lecture Planner - Chemistry - (Pathshala 12th JEE 2024)Harshit MishraNo ratings yet
- Steinmueller Engineering Produktbroschuere Steam GenerationDocument7 pagesSteinmueller Engineering Produktbroschuere Steam GenerationTC Capulcu Mustafa MNo ratings yet
- Physics Investigatory Project Class 12Document20 pagesPhysics Investigatory Project Class 12vishuNo ratings yet
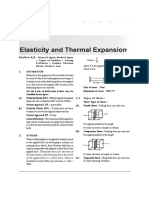
- Elasticity and Thermal ExpansionDocument24 pagesElasticity and Thermal ExpansionAyush SrivastavNo ratings yet
- The Salvation Army Chikankata College of Biomedical Sciences The Ministry of HealthDocument7 pagesThe Salvation Army Chikankata College of Biomedical Sciences The Ministry of HealthChabala Ng'anduNo ratings yet
- Franz Diffusion Cell Approach For Pre-Formulation Characterisation of Ketoprofen Semi-Solid Dosage FormsDocument8 pagesFranz Diffusion Cell Approach For Pre-Formulation Characterisation of Ketoprofen Semi-Solid Dosage FormsHEMANo ratings yet
- Combustion Engine Vs Gas Turbine - Part Load Efficiency and FlexibilityDocument4 pagesCombustion Engine Vs Gas Turbine - Part Load Efficiency and Flexibilityseif elsaieNo ratings yet
- PCHEM ISCO ISCR and Risk Reward Remediation Program Presentation PDFDocument93 pagesPCHEM ISCO ISCR and Risk Reward Remediation Program Presentation PDFMartin Daniel Palacios Quevedo100% (1)
- 1 Chemistry Module Chapter 1 Introduction To ChemistryDocument20 pages1 Chemistry Module Chapter 1 Introduction To ChemistryBj OcsenaNo ratings yet
- Physics homework solutions for chapter 23 problemsDocument12 pagesPhysics homework solutions for chapter 23 problemsSandeep BadigantiNo ratings yet
- Lab Report 5 BMBDocument6 pagesLab Report 5 BMBJennifer Driskell100% (1)
- Tabelul Periodic - Google SearchDocument1 pageTabelul Periodic - Google SearchMariaNo ratings yet
- Alexa Riley - Transpiration LabDocument7 pagesAlexa Riley - Transpiration Labapi-553676905No ratings yet
- Joining of Metal and Non-Polar Polypropylene Composite Through A SimpleDocument12 pagesJoining of Metal and Non-Polar Polypropylene Composite Through A SimpleFilipe PossamaiNo ratings yet
- One Liners Geography Final PDFDocument10 pagesOne Liners Geography Final PDFanmolsaini01No ratings yet
- Gas Separator Sizing SpreadsheetDocument19 pagesGas Separator Sizing SpreadsheetSaid FerdjallahNo ratings yet
- Calculation of Corrosion RateDocument2 pagesCalculation of Corrosion RateVũ Phi YếnNo ratings yet
- Acidity, Alkalinity, and HardnessDocument30 pagesAcidity, Alkalinity, and HardnessCharan DeepNo ratings yet
- Kantha Ocean Mixed LayerDocument8 pagesKantha Ocean Mixed LayerAdrianio LozhadaNo ratings yet
- 1.0-Introduction: Technical Proposal R.O. SystemDocument13 pages1.0-Introduction: Technical Proposal R.O. SystemZarkKhanNo ratings yet
- Automobile Catalytic ConverterDocument9 pagesAutomobile Catalytic Converterสุทิมา ศรีวิภาสถิตย์No ratings yet
- Foundations of Classical ElectrodynamicsDocument414 pagesFoundations of Classical ElectrodynamicsAnonymous UrVkcdNo ratings yet
- Fire Theory & Investigation ElementsDocument15 pagesFire Theory & Investigation ElementsAccu Xii VhenzNo ratings yet
- Geog 213Document365 pagesGeog 213Fatima TwumasiNo ratings yet
- Grade 11 Quiz Bee Questions on Rocks, Heat Transfer, Plate TectonicsDocument4 pagesGrade 11 Quiz Bee Questions on Rocks, Heat Transfer, Plate Tectonicsellton john pilarNo ratings yet
- Structural System and Codes of Tall BuildingsDocument29 pagesStructural System and Codes of Tall BuildingsRatul HasanNo ratings yet
- PDF Solutions Manual Principles Chemical Engineering Processes Material Energy Balances 2nd Edition Ghasem CompressDocument40 pagesPDF Solutions Manual Principles Chemical Engineering Processes Material Energy Balances 2nd Edition Ghasem CompressmoftajNo ratings yet
- Heat Transfer Rate and Temperature CalculationsDocument9 pagesHeat Transfer Rate and Temperature CalculationsHectorCabzNo ratings yet
- Radioactivity Measurement UnitsDocument3 pagesRadioactivity Measurement UnitsLee Kwon ZeeNo ratings yet