Professional Documents
Culture Documents
AMSY-6 OpMan
Uploaded by
Fernando Piñal MoctezumaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
AMSY-6 OpMan
Uploaded by
Fernando Piñal MoctezumaCopyright:
Available Formats
AMSY-6 Operation Manual
Document version 04-2017
Contact Address
Vallen Systeme GmbH email: info@vallen.de Tel: +49 8178 9674-400
Schaeftlarner Weg 26a http://www.vallen.de Fax: +49 8178 9674-444
D-82057 Icking
Germany
Comments and recommendations are appreciated and may be mailed to: sales@Vallen.de
Copyright © 2017, Vallen Systeme GmbH
All rights reserved.
Electronic versions of this document may be read online, downloaded for personal use, or
referenced in another document as a URL to a Vallen website. No part of this specification may
be published commercially in print or electronic form, edited, translated, or otherwise altered
without the permission of Vallen.
Trademarks and Licenses
The hardware and/or software described herein are furnished under a license and may be used
or copied only in accordance with the terms of such license.
AMSY-5, AMSY-6, ASIP-2, VisualAE, VisualClass and VisualTR are trademarks of Vallen
Systeme GmbH
Disclaimer
The material contained in this document is provided “as is” and is subject to being changed,
without notice, in future editions. Further, to the maximum extent permitted by applicable law,
Vallen Systeme disclaims all warranties, either expressed or implied with regard to this
specification and any information contained herein, including but not limited to the implied
warranties of merchantability and fitness for a particular purpose. Vallen Systeme shall not be
liable for errors or for incidental or consequential damages in connection with the furnishing,
use, or performance of this document or any information contained herein.
Vallen Systeme shall not be liable for any direct, indirect, consequential or incidental damage
arising out of the use or inability to use of the AMSY-6 and the equipment delivered with it.
Vallen Systeme reserves the right to charge for any efforts taken to remedy any problems for
which we are not responsible.
Revision Record
Date Changes
04-2017 Updated info, added global coordinate info, changes related to USB3.1
04-2017 file: amsy-6_opman.docm 2 of 149
AMSY-6 Operation Manual
Purpose of this Document
This document:
• Describes the operation of the AMSY-6 system
• Provides hints on how to perform AE-measurements with AMSY-6
• Outlines the most important tools and procedures required for system maintenance and test
This document is one out of four documents describing the AMSY-6 system. Additional
information can be found in:
• AMSY-6 System Specification
• AMSY-6 System Description
• Vallen AE-Suite Software Manual
Contents
1 Introduction ....................................................................................................................... 8
2 Installing Vallen AE-Suite software................................................................................. 9
2.1 Installation requirements................................................................................................. 9
2.2 User Account Control settings for Windows 7 and Windows VISTA .............................. 9
2.3 Obtaining the software .................................................................................................. 10
2.4 Pre installation .............................................................................................................. 10
2.5 Software installation ...................................................................................................... 11
2.6 Installation Troubleshooting .......................................................................................... 15
2.6.1 Installation process does not continue after internet activation ........................... 15
2.6.2 AMSY-6 hardware detection failed ...................................................................... 15
2.6.3 Hardware initialization reports a firmware mismatch ........................................... 15
2.7 Updating software ......................................................................................................... 15
2.8 Upgrading software ....................................................................................................... 16
3 Setting up measurement hardware ............................................................................... 17
3.1 Position of mains switch ............................................................................................... 17
3.2 Chassis setup ............................................................................................................... 17
3.3 Multi chassis setup ....................................................................................................... 17
3.4 Elements of the chassis ................................................................................................ 18
3.4.1 Control panel elements ........................................................................................ 19
3.4.2 ASIP-2 front panel elements ................................................................................ 23
3.4.3 Back panel elements ............................................................................................ 25
4 Extending hardware........................................................................................................ 28
4.1 Adding ASIP-2 .............................................................................................................. 28
4.2 Adding external parameter inputs ................................................................................. 28
5 Mounting AE-Sensors .................................................................................................... 29
5.1 Basic information about AE-sensors ............................................................................ 29
04-2017 file: amsy-6_opman.docm 3 of 149
AMSY-6 Operation Manual
5.2 Sensor mounting ........................................................................................................... 30
5.3 Mounting verification ..................................................................................................... 30
6 Setting up preamplifiers ................................................................................................. 31
6.1 AEP3 Preamplifier ........................................................................................................ 31
6.2 AEP4 Preamplifier ........................................................................................................ 32
6.3 AEP5 Preamplifier ........................................................................................................ 32
7 How to perform data acquisition ................................................................................... 33
7.1 Data Stored in Primary Data Files ................................................................................ 33
7.2 Signal Measurement ..................................................................................................... 33
7.3 Getting started with Acquisition .................................................................................... 34
7.4 Hardware detection ....................................................................................................... 34
7.4.1 Very first connection of PC to chassis ................................................................. 35
7.4.2 No change in system configuration detected ....................................................... 35
7.4.3 System configuration change detected ................................................................ 36
7.4.4 Changing channel configuration .......................................................................... 37
7.5 Defining ASIP-2 input devices ...................................................................................... 39
7.5.1 Channel configuration for individual chassis ........................................................ 40
7.5.2 Finishing hardware detection ............................................................................... 41
7.6 Acquisition Setup .......................................................................................................... 41
7.7 Acquisition File .............................................................................................................. 42
7.8 Acquisition Settings ...................................................................................................... 42
7.8.1 General Settings .................................................................................................. 43
7.8.2 AE-Channels ........................................................................................................ 44
7.8.3 Parametric Input Settings ..................................................................................... 47
7.9 Transient Data recording modes .................................................................................. 48
7.9.1 Fixed page length recording ................................................................................ 48
7.9.2 Duration adapted transient recording................................................................... 49
7.9.3 Trigger groups and Trigger modes ...................................................................... 50
7.10 Continuous Mode data acquisition ............................................................................... 50
7.11 Data Recording ............................................................................................................. 52
8 Introduction to data analysis ......................................................................................... 53
8.1 VisualAE Overview ....................................................................................................... 53
8.1.1 Relation of VisualAE to Acquisition ...................................................................... 55
8.1.2 Analysis using VisualAE ...................................................................................... 55
8.1.3 Data Processing ................................................................................................... 55
8.2 Event Builder ................................................................................................................ 56
8.2.1 Assembling individual hits into an event data set (FHCDT condition) ................. 57
8.2.2 Additional conditions for terminating an event data set assembling process
(DT1X-Max and DTNX-Max) ................................................................................ 59
8.2.3 Some practical remarks about FHCDT, DT1X-Max and DTNX-Max ................... 59
8.2.4 Channel functions ................................................................................................ 60
8.3 Location Processor ....................................................................................................... 60
8.4 Cluster Processor ......................................................................................................... 61
04-2017 file: amsy-6_opman.docm 4 of 149
AMSY-6 Operation Manual
8.5 Filter Processor ............................................................................................................. 61
8.6 User Processor ............................................................................................................. 61
8.7 Polygon Processor ........................................................................................................ 62
8.8 Grading Processor ........................................................................................................ 62
8.9 ECP Embedded Code Processor ................................................................................. 62
8.10 Alarm Processor ........................................................................................................... 62
8.11 Visuals in VisualAE ....................................................................................................... 62
9 How to setup visuals in VisualAE ................................................................................. 64
9.1 Formatting Conventions ................................................................................................ 64
9.2 Diagram Example 1: Superposition of AE and Load ....................................................64
9.3 Diagram Example 2: Superposition of Transient and Background Activity ..................70
9.4 Diagram Example 3: Planar Location Diagrams with Clustering ..................................73
9.5 Diagram Example 4: Correlation Diagrams .................................................................. 78
9.6 Diagram Example 5: cumulative amplitude diagrams ..................................................80
9.7 Diagram Example 6: 3D location plots ......................................................................... 82
10 Examples of visuals in VisualAE Library ..................................................................... 87
10.1 Examples of diagrams in Library .................................................................................. 87
10.2 Applied AE-diagram examples from VisualAE ............................................................. 91
11 Page Analysis and Page Layouts in VisualAE ............................................................. 95
12 Example of location diagrams in case of a pressure vessel .................................... 101
12.1 Using spherical location algorithm to located AE-sources on end caps .....................101
12.1.1 Displaying results of location processor............................................................. 102
12.2 Approximating end caps with planes for planar location algorithm ............................104
12.2.1 Orthographic projection of end cap onto a plane ............................................... 104
12.2.2 Lambert projection of end cap onto a plane ...................................................... 106
12.3 Comparison of end cap location results ..................................................................... 107
12.4 About the diagrams used in this example................................................................... 108
12.4.1 Advanced application of background image ...................................................... 109
13 Results in VisualAE ...................................................................................................... 111
13.1 Hit Data ....................................................................................................................... 111
13.2 Hit Data Flags ............................................................................................................. 113
13.3 Status Data ................................................................................................................. 115
13.4 Parametric Data .......................................................................................................... 115
13.5 Location Results ......................................................................................................... 116
13.6 Grading Processor Results ......................................................................................... 118
13.7 Administrative Results ................................................................................................ 118
13.8 TR-Feature Extractor Results ..................................................................................... 119
13.9 Classifier Results ........................................................................................................ 120
14 Accessing and exporting measurement data ............................................................ 121
15 Reporting analysis results ........................................................................................... 123
15.1 Exporting Diagrams .................................................................................................... 123
15.2 Printing ........................................................................................................................ 123
04-2017 file: amsy-6_opman.docm 5 of 149
AMSY-6 Operation Manual
16 Alarm Manager .............................................................................................................. 124
16.1 Evaluators ................................................................................................................... 124
16.2 Actions ........................................................................................................................ 125
16.3 Signals ........................................................................................................................ 125
16.4 Interaction of Alarm system components ................................................................... 126
16.4.1 Interaction between Evaluators, Signals, Actions and user interaction ............. 126
16.4.2 Log file ................................................................................................................ 127
17 Introduction to VisualTR .............................................................................................. 128
17.1 Example: a closer look at thresholds .......................................................................... 130
17.2 Tools of VisualTR ....................................................................................................... 130
17.2.1 Filtering of Transient Recorder Data .................................................................. 130
17.2.2 FFT Averager ..................................................................................................... 130
17.3 Reporting in VisualTR ................................................................................................. 131
18 Introduction to Vallen TR-Feature Extractor .............................................................. 132
18.1 FFT Feature Extractor ................................................................................................ 133
19 Introduction to VisualClass ......................................................................................... 135
19.1 Inside VisualClass ...................................................................................................... 136
20 Guide to good AE-measurement practice .................................................................. 138
20.1 Step 1: Equipment verification .................................................................................... 138
20.1.1 ASIP-2 channel - and chassis verification.......................................................... 138
20.1.2 Verification of sensitivity of sensors ................................................................... 138
20.1.3 Common Mode test for AE-sensors ................................................................... 138
20.2 Step 2: Mounting sensors and mounting verification ..................................................138
20.3 Step 3: Conducting a noise test .................................................................................. 138
20.3.1 Noise – a definition............................................................................................. 138
20.3.2 Goals of noise reduction .................................................................................... 139
20.3.3 Noise effecting signals ....................................................................................... 139
20.3.4 AE-signal and event interference ....................................................................... 139
20.3.5 Measuring noise ................................................................................................. 140
20.3.6 Strategy to reduce noise .................................................................................... 140
20.3.7 Specific measures against noise ....................................................................... 141
st
20.4 Step 4: 1 reference measurement for stability of sensor coupling quality ................144
20.5 Step 5: measuring speed of sound ............................................................................. 145
20.6 Step 6: measuring attenuation .................................................................................... 146
20.7 Step 7: conducting AE-test ......................................................................................... 146
20.8 Step 8: Post-test pulsing table for judging stability of sensor coupling quality ...........146
20.9 Step 9: verifying location results ................................................................................. 146
21 Maintaining AMSY-6 hardware .................................................................................... 147
21.1 System Verification ..................................................................................................... 147
21.1.1 Requirements ..................................................................................................... 147
21.2 Sensor Tester ............................................................................................................. 148
22 AE-Accessories............................................................................................................. 149
04-2017 file: amsy-6_opman.docm 6 of 149
AMSY-6 Operation Manual
04-2017 file: amsy-6_opman.docm 7 of 149
AMSY-6 Operation Manual
1 Introduction
This operation manual is part of the AMSY-6 product. Please read it carefully before putting an
AMSY-6 into operation. Make sure that an operation manual is always accessible to operators
throughout lifetime of the product.
Following symbols are used throughout the operation manual:
Note:
Indicates a note or comment
Literature:
Indicates additional literature references for further reading
Special Feature:
Indicates a unique feature of Vallen hard- or software
Following symbols can be found on the equipment
IEC 60417-5017 Protective ground
IEC 60415-5007 “ON” (power)
IEC 60415-5008 “OFF” (power)
General notice of danger. Please refer to operation
ISO 7000-0434
manual
04-2017 file: amsy-6_opman.docm 8 of 149
AMSY-6 Operation Manual
2 Installing Vallen AE-Suite software
This section describes the Vallen AE-Suite software installation. It starts with the installation
requirements and how to obtain the Vallen AE-Suite software. Please read these parts carefully
and compare the requirements with your PC system.
Section 2.5 describes step by step how to get the Vallen AE-Suite software up and running. The
installation process is fully automated. In the unexpected case that you run into any problems
follow the step-by-step instructions in this document.
2.1 Installation requirements
The Vallen AE-Suite software installation requires
• AE-Suite software
• a standard Windows PC. For detailed system requirements see the AMSY-6 System
Specification
• a valid KeyFile (please contact sales@vallen.de, if you need one)
• administrative rights to your PC (if you do not have administrative rights you cannot install
AE-suite software. Please contact your administrator if you do not have appropriate rights
on your PC)
• about 100 MB of free disk space for AE-Suite installation. We strongly recommend using
NTFS file format for best data acquisition performance.
2.2 User Account Control settings for Windows 7 and Windows
VISTA
User Account Control (UAC) does not have to be disabled anymore when software version
R2011.1115 or later is used.
Windows XP does not require these settings as UAC was not implemented in Windows XP.
UAC (user account control) has to be disabled for installation purposes and running the AE-
suite software. In order to do so, follow these steps.
Windows VISTA
1. Launch MSCONFIG: StartRun MSCONFIG
2. Click on the Tools tab. Scroll down till you find "Disable UAC/User account control". Click
on that line.
3. Press the Launch/Start button or Tools tab.
4. A CMD window will open. When the command has been executed, you can close the
window.
5. Close MSCONFIG. You need to reboot the computer for changes to apply.
You can re-enable UAC by selecting the "Enable UAC" line and then clicking on the Launch
button. However, enabled UAC will prevent execution of any AE-Suite software programs.
04-2017 file: amsy-6_opman.docm 9 of 149
AMSY-6 Operation Manual
Windows 7
1. Launch MSCONFIG: StartRun MSCONFIG
2. Click on the Tools tab. Scroll down till you find “UAC/User account control settings". Click
on that line.
3. Press the Launch/Start button.
4. A pop up menu opens where the UAC setting can be changed by use of a slide control.
Disable UAC by setting it to the lowest value and confirm it with “OK”
5. Close MSCONFIG. You need to reboot the computer for changes to apply.
You can re-enable UAC by choosing a higher security setting. However, enabled UAC will
prevent execution of any AE-Suite software program.
2.3 Obtaining the software
The AE-Suite software is shipped on CD-ROM with every AMSY-6. Latest updates can be
downloaded from the Vallen Website at www.vallen.de/downloads . Authentication is requested
before you can access the download area. Please ask Vallen support for valid authentication
data.
To install the AE-Suite you will need a KeyFile. A KeyFile is shipped on a KeyCD with every
instrument or can be requested from Vallen Systeme (sales@vallen.de).
Please request an evaluation KeyFile by email from sales@vallen.de for a time limited demo
installation in order to test software modules.
2.4 Pre installation
1. Copy your KeyFile to HDD. We recommend copying it to your desktop. Further we
recommend making a backup copy of KeyFile.
2. Remove older versions of the AE-Suite software. We strongly recommend a backup of files
that you would like to keep (e.g. library files and vac files). Data files (primary, transient and
transient feature data files) will not be deleted during uninstall process.
Internet download
If the AE-Suite software is obtained by downloading it from the internet:
1. Store and unzip the AESuiteYYYY.MMDD.zip (e.g. to your Windows desktop). Open the
folder to which AE-Suite was unzipped and read the ReadMe.rtf first, please.
2. Start the installation by executing AESuite.msi.
04-2017 file: amsy-6_opman.docm 10 of 149
AMSY-6 Operation Manual
2.5 Software installation
1. Insert Vallen AE-Suite CD in
your CD/DVD drive. A welcome
dialog should start automatically.
If AutoRun is disabled on your
PC, use your mouse or keyboard
and select: Start Run and type
or select D:\CDStart.exe,
presuming your CD/DVD is drive
D.
Click “Install software” to
proceed with the installation
2. Click “Next” on the welcome
screen
3. Please read the License
Agreement carefully.
Check “I accept the license
agreement”
Click “Next >”.
04-2017 file: amsy-6_opman.docm 11 of 149
AMSY-6 Operation Manual
4. The “Readme Information”
provides latest information.
Please read carefully and
continue with “Next >”.
5. A short description of the product
activation process follows.
Continue with “Next >”.
6. Browse to the location of your
KeyFile. Select the KeyFile and
open it.
In the subsequent pop up menu
you can choose the activation
process.
Activating the software requires
a KeyCode, which has to be
requested. If the PC is
connected to the internet, you
can use “Internet Activation” to
get your KeyCode on the spot.
Alternatively, choose “KeyCode Request Form” and fill out the required fields.
Send the document by email or fax. We will respond with a KeyCode which you should
paste into the lower field.
04-2017 file: amsy-6_opman.docm 12 of 149
AMSY-6 Operation Manual
7. When using “Internet Activation”,
the KeyCode will be pasted
automatically into the appropriate
field. Once your KeyCode is
entered the activation is
completed. Click “OK” to
continue.
The RequestCode -KeyCode
combination is unique for every
PC and installation and can be
kept for future references.
If internet activation fails, use the
KeyCode Request Form to get
your KeyCode
8. Choose “Analysis only, no
acquisition”, if the PC is used for
analysis only, otherwise leave
the default setting and click “Next
>”.
9. Click “Next>” to start copying the
selected files to HDD.
04-2017 file: amsy-6_opman.docm 13 of 149
AMSY-6 Operation Manual
10. If you want to install the AE-Suite
for all users who work with this
PC, check “Anyone who uses
this computer” (all user profiles,
recommended) otherwise check
“Only for me” (current user
profile).
Continue with “Next >”.
11. After the installation of the
software you will be prompted to
finish the installation.
Continue with “Finish”
12. Finally hardware detection can
be carried out. If you have not
connected your AMSY-6 to the
PC before, do so now and power
it up.
The operating system will
recognize a new USB hardware
and prompt you to install the
driver. Follow the instructions for
automatic installation of the
AMSY-6 driver. If the driver has
been successfully installed, the
operating system will recognize
the USB device as AMSY-6.
After successful installation of the driver you can carry out the hardware detection by
clicking “Next >”.
04-2017 file: amsy-6_opman.docm 14 of 149
AMSY-6 Operation Manual
13. After successful hardware
detection the installation process
is finished. The AMSY-6 hard-
and software can be used.
2.6 Installation Troubleshooting
2.6.1 Installation process does not continue after internet activation
In some occasions the installation process will not continue after the internet activation step
(step number 7). Instead you are asked to activate the software by requesting the KeyCode
again.
In such a case the UAC has not been properly disabled. UAC will prevent the installation routine
from continuing. Please follow the instructions in chapter 2.2 to disable UAC.
2.6.2 AMSY-6 hardware detection failed
The installation cannot be finished successfully since hardware detection cannot be carried out.
Most likely the USB driver for the AMSY-6 was not properly installed.
Go to Windows Control Panel and execute the Device Manager. If the Device Manager reports
an Unknown Device, the driver installation of AMSY-6 has failed. Right click on the unknown
device to open the context sensitive menu and select to install the driver software from the local
PC (not from CD or Internet).
After successful installation the AMSY-6 device is recognized by the operating system.
2.6.3 Hardware initialization reports a firmware mismatch
A firmware mismatch may be reported during hardware initialization, when a chassis or ASIP-2
firmware does not match the requirements of Acquisition program (e.g. a new software version
is installed).
Two FPGAs require dedicated firmware versions: chassis FPGA and ASIP-2 FPGA. Please
start the “Firmware Updater” utility from Utilities tab of Vallen Control Panel and proceed
accordingly to update either ASIP-2 firmware or chassis firmware.
2.7 Updating software
In regular intervals new versions of the Vallen AE-Suite software are released. New versions
contain fixes, performance improvements and new features.
It is recommended to always use the newest software version.
The newest software version can be obtained from the Vallen website. Please refer to chapter
2.3 for obtaining the software.
04-2017 file: amsy-6_opman.docm 15 of 149
AMSY-6 Operation Manual
The installation process will be identical to the one described in chapter 2.4 and 2.5.
2.8 Upgrading software
Since the Vallen AE-Suite software is completely modular, new modules can be added and
activated any time. To add new modules you will need a new KeyFile which enables their
usage. Please contact Vallen sales staff (sales@vallen.de) if you want to extend the
functionality of your software.
In most cases you can activate the new modules
by just installing the new KeyFile.
A new KeyFile can be installed by use of the “Key
Setup” utility in the Utilities tab of the Vallen
Control Panel.
Execute the Key Setup program and follow the
instructions (steps 6 and 7 of chapter 2.5).
If you are adding VisualTR or VisualClass to your
KeyFile you will need to reinstall the AE-Suite
software (as described in chapter 2.5).
04-2017 file: amsy-6_opman.docm 16 of 149
AMSY-6 Operation Manual
3 Setting up measurement hardware
Parts of an AMSY-6 system are (i) up to eight chassis holding (ii) ASIP-2 boards and (iii) AE-
sensors, (iv) preamplifiers, (v) a PC and (vi) cables for connecting sensors and preamplifiers to
the measurement system.
3.1 Position of mains switch
Mains switch of MB2-V1 chassis is
located at the rear panel. It is part of
power inlet module which also contains
fuses and power connector.
Mains switch of MB6-V1 chassis is
located at rear panel. Similar to MB2-
V1 chassis it is part of power inlet.
Mains switch of MB19-V1 and EB21-V1
chassis is located at rear panel on extra
module-panel called “SM” (Supply
monitor).
3.2 Chassis setup
With MB2-V1, MB6-V1, MB19-V1 and EB21-V1 cool air is drawn in through slits in the bottom
plate and blown out through openings in the rear panel.
Care must be taken that the chassis is placed on a flat support and that no table cloth or loose
pieces of paper hinders the flow of cool air into the bottom of the enclosure. The rear of the
AMSY-6 should be clear of any obstacles.
The front feet shall be expanded for a better cooling performance.
3.3 Multi chassis setup
In a multi chassis setup, more than one chassis is used to form a larger AMSY-6 system.
Reasons for using a multi chassis setup are:
• Realizing a channel number, larger than which can be achieved with one chassis
• Increase transient data transfer rate by using different USB Root Hubs of an acquisition PC
or laptop. This strategy may be important also for small channel number AMSY-6 system in
case of a streaming application.
An AMSY-6 multi chassis setup can contain up to eight chassis. The maximum AE-channel
number that can be achieved is 254.
In a multi chassis setup each chassis must have a unique address (see section 3.4.3, Address
Selector for more information).
04-2017 file: amsy-6_opman.docm 17 of 149
AMSY-6 Operation Manual
Each chassis has to be connected via USB to the same PC or laptop running the data
acquisition program. A USB hub can be used if not enough connectors are available on the PC
or laptop.
The chassis have to be daisy chained by the use of special sync-cables using connectors
labeled “Prev. Port”, “Next Port” (see section 3.4.3 for more information). This is necessary to
get time synchronization across all channels in a multi chassis setup. Make sure that the
chassis with lowest address is the first in chain, followed by the other chassis in ascending order
of their address.
The first chassis in the chain must be the one with the lowest address. It acts as “Master”, while
all following chassis are considered to be “Slaves”. Externals connector and Alarm connector
(see section 3.4.3 for more information on both connectors) will work in the “Master” chassis,
only. Furthermore LEDs like “Run”, “Alarm”, “Warning”, “SP0” and “SP1” (see section 3.4.1) are
functional only in a “Master” chassis.
Up to 16 parametric inputs can be used. Up to 8 inputs can be mounted in a “Master” or a
“Slave” chassis.
3.4 Elements of the chassis
Chassis of an AMSY-6 system are available in different sizes: MB2-V1, MB6-V1 and MB19-V1
for a maximum of 4-, 12- and 38 AE channels. The capital letters MB indicate that it is a Master
Box, a chassis which can be operated stand alone. Additionally there is an EB21-V1 chassis
available for a maximum of 42 AE-channels. The EB indicates that it is an extension box, a
chassis that can only be operated together with an MBx-V1.
Figure 1: MB2-V1-, MB6-V1- and MB19-V1 chassis.
Every MBx-V1 comes with a Control Panel that holds parametric inputs and control elements.
The EB21-V1 does not have a Control Panel. Instead it can house two additional ASIP-2 boards
at the same size as an MB19-V1.
A chassis offers a defined environment for the ASIP-2 cards providing the appropriate power
and busses for data transfer. The number in the chassis designation indicates the maximum
number of ASIP-2 cards a chassis can house.
A MBx-V1 chassis has a control panel which holds the parametric input channels, record enable
switches and various LEDs indicating the runtime status.
04-2017 file: amsy-6_opman.docm 18 of 149
AMSY-6 Operation Manual
A chassis has to be connected to a PC on which the system front-end software runs. The
system front-end software controls every aspect of data acquisition.
Figure 2: front of a MB6-V1 chassis and front panel elements.
Figure 2 shows the front panel elements of an MB6-V1 chassis. On the left hand side of the
chassis resides the Control Panel (CP), containing 4 parametric input channels, record enable
switches and LEDs. Next to Control Panel are ASIP-2 slots which can hold ASIP-2 signal
processor boards. An ASIP-2 has two BNC connectors, one for each AE-channel, a switch for
selecting one or both channels for audio output and 8 LEDs indicating the status of the ASIP-2.
A speaker is either mounted at the front panel (MB6-V1) or at the rear panel (MB19-V1, EB21-
V1).
3.4.1 Control panel elements
Figure 3: Control Panel elements
04-2017 file: amsy-6_opman.docm 19 of 149
AMSY-6 Operation Manual
On LED (green)
In on state indicates that power is applied to the chassis and it is switched on.
Alarm LED (red)
The Alarm LED of a master chassis can be set by the Alarm Manager via the acquisition
program. It can be used to indicate potentially dangerous situations. If the Alarm LED is set to
on, the according pin at the alarm connector is set to active.
The state of the Alarm LED can also be set by asserting ground to the ALARM signal at the
Alarm Connector.
In a slave chassis this LED is always off, except the local ALARM signal is asserted.
Warning LED (yellow)
The Warning LED of a master chassis can be set by the Alarm Manager via the acquisition
program. It can be used to indicate situations that require special attention. If the Warning LED
is set to on, the according pin at the alarm connector is set to active.
The state of the Warning LED can also be set by asserting ground to the WARNING signal at
the Alarm Connector.
In a slave chassis this LED is always off, except the local WARNING signal is asserted.
SP0, SP1 (yellow)
The SP0 and SP1 LED of a master chassis can be set by the Alarm Manager via acquisition
program or by asserting ground to the SP0 signal at the Alarm Connector.
In a slave chassis this LED is always off, except the local SP0 signal is asserted.
SP1L, SP2L
These two LEDs are reserved for future usage.
Master (green)
The Master LED indicates the master chassis in a multiple chassis setup. The LED is off in all
slave chassis during hardware detection.
Full (red)
This LED is always off unless PC resources are running low or a process such as an updating
or scanning anti-virus software locks down CPU. A blinking Full LED indicates that the chassis
output buffer runs about 80% full (in this case the chassis enters long duration mode). This
situation is indicated by the “E” hit flag. Once the buffer is emptied the Full LED will cease
blinking.
Full LED is constantly on, if the output buffer gets an overflow (fatal, non-recoverable error).
This LED is controlled for each chassis individually.
Please “Pause” Acquisition to reset a “Full” LED that was permanently on.
USB (green)
When Acquisition is running, this LED is switched on whenever data is transferred over USB. If
USB LED is off no USB data transfer happened for over 1s.
04-2017 file: amsy-6_opman.docm 20 of 149
AMSY-6 Operation Manual
This LED is controlled for each chassis individually.
No Pol (red)
This LED is always off. It will be on in similar cases as documented for Full LED. No Poll LED is
switched on, if the chassis was not polled for data by the acquisition program for at least 5
seconds. Power down AMSY-6 and switch it on again to reset No Poll LED.
It is required to check and repair PC configuration, if this LED gets on.
This LED is controlled for each chassis individually.
Please “Pause” Acquisition or disable recording by use of AE enable/disable switch to reset “No
Poll” LED if it was on.
If No Poll LED cannot be reset power down AMSY-6.
Long (yellow)
The LED is usually off. If on, the Long LED indicates that at least one channel in the chassis
entered long duration mode.
An AE-channel enters long duration mode, if a channel’s buffer runs half full. With AMSY-6 this
can only happen if hit rate exceeds 100 000 hits/s per chassis. When in the Long Duration
Mode, the Duration Discrimination Time of the AE-channel is (temporarily) set to 98ms. This
causes the hits currently processed in the channel to last until termination by the timeout feature
(approx. 100ms after the start of the hit). This effectively reduces the maximum feature data set
rate to 10 hits per second.
A low hit rate ensures that buffers can be emptied preventing loss of data.
During the Long Duration Mode, the “D-Flag” is set in the hit data sets, identifying data
generated during Long Duration Mode. (Find in help text under “Hit Flags” more details about
flags in hit data sets). Such data does not retain individual hit information; therefore it is
unsuitable for calculation of location, for counting hits, and for processing distributions and
correlations of the AE feature set (amplitude, risetime, duration, energy, counts). On the other
hand, cumulative information about number of cascaded hits (CHIT, see section 0), counts
(CCNT, see section 0) and energy (CENY, see section 0) is completely maintained during Long
Mode. The Long LED goes off when the buffers in all channels have been emptied.
This LED is controlled for each chassis individually.
Pulsing (green)
The Pulsing LED indicates that a chassis is generating pulses. This LED is only active in the
master chassis of a multiple chassis setup and indicates also pulsing slave chassis. A “C” hit-
flag indicates a pulsing channel while a “c” hit-flag indicates a receiving channel.
In a slave chassis this LED is always off.
Run (green)
In a master chassis this LED is on, if the acquisition program is in recording mode.
If recording is disabled by hardware (AE Switch disabled or /DISABLE signal active) when
recording mode is started, this LED remains off, until recording is enabled by hardware. Then it
stays on until acquisition is suspended.
While this LED is off, the time counter is not running, the parametric counter PCTA is frozen,
and the parametric counter PCTD is cleared. No data sets are being generated when the Run
LED is off.
04-2017 file: amsy-6_opman.docm 21 of 149
AMSY-6 Operation Manual
In a slave chassis this LED is always off.
AE-Disable Switch
This switch is located to the left of the “AE disable” LED. Pushed to the right (towards the LED),
the switch disables data acquisition (AE and TR).
It can be used to disable acquisition of data when, for example, work on the test object has to
be carried out or when it is clear that by an external incident false data would be generated.
Data acquisition is disabled as long as “AE disable” LED is blinking. Blinking shall draw
operator’s attention not to forget the disable state of measurement hardware.
TR-Disable Switch
This switch is located left of the “TR disable” LED. Pushed to the right, it disables TR-data
(waveform) acquisition only, but AE-data will still be recorded.
This can be used to reduce the amount of data stored to disk: e.g. enable TR recording only
from time to time may provide useful information but reduces the data volume considerably.
AE Disabled LED (yellow)
The AE Disabled LED indicates that the generation and recording of new data (AE as well as
TR) is disabled. Data recording is disabled and LED is on:
• If acquisition is not started
• If primary data file is full (acquisition terminated)
• If AE-disable switch is in disable position (right position)
• If an out-of-limit condition occurs at a parametric input channel selected to control
recording.
• If an external /Disable is applied to the Externals connector (AMSY-6 rear side)
It is blinking when the acquisition program is in recording mode and recording is disabled by AE
switch (blinking has priority).
When the AE-disabled LED is on, the TR-disable LED is on too. TR-data cannot be recorded
without AE-data.
External Disabled LED
The External Disabled LED indicates that data generation is disabled externally. If the “Ext dis”
LED is on, the “AE disable” and “TR disable” LEDs will also be on.
TR Disabled LED
The TR Disabled LED indicates that transient recording is disabled. This LED is on if:
• transient recording is disabled globally in the acquisition setup
• TR disable switch is in disable position
• AE-disable LED is on
It is blinking when the acquisition program is in recording mode and recording is disabled by AE
or TR switch (blinking has priority, except TR data acquisition is not enabled).
04-2017 file: amsy-6_opman.docm 22 of 149
AMSY-6 Operation Manual
3.4.2 ASIP-2 front panel elements
Figure 4: ASIP-2 front panel elements
Audio Selection Switch
Dipping this switch to the left selects the odd channel for “audibility”, dipping it again to the left,
deselects the odd channel. Dipping to the right controls the even channel. “Audibility” means
that the frequency filtered AE signal is passed to the central Audio Unit. The Audio Unit selects
the maximum rectified signal level received from all “audio-selected” AE channels (ASIP-2 or
ASIPP). By rectifying the AE signal, AE bursts produce a signal in the audible frequency range,
which can be played back by the loudspeaker in the control panel.
Threshold LED
This green LED is on for at least 30 ms, when the respective channel detects a threshold
crossing. The LED flashes yellow, if the AE signal - before digital filtering - exceeds 95% of the
input range. This indicates that the preamplifier output is nearby or above the saturation point.
Selected LED
This green LED indicates when the channel is selected for audibility (see Audio Selection
Switch). The LED flashes yellow, when this channel is in pulsing mode. In pulsing mode a pulse
of programmable amplitude is passed through the ASIP-2 to the corresponding BNC connector.
It can be passed through the preamplifier up to the sensor’s piezoelectric element in order to
excite an acoustic event for a sensor coupling test.
Open LED
This LED indicates if the DC current consumption at the BNC socket is less than 8-12mA. This
indicates that no preamplifier is connected to the BNC-connector.
The Open LED makes it easy to find out to which channel a certain preamplifier is connected:
By removing the cable from the preamplifier, the corresponding Open LED turns on.
04-2017 file: amsy-6_opman.docm 23 of 149
AMSY-6 Operation Manual
The Open LED is also on when the channel is in AC mode, i.e. when no DC voltage is supplied
to the preamplifier.
This LED blinks red, when the DC-supply current exceeds about 95-105mA. This indicates either
a defective preamplifier or a short cut on the cable to the preamplifier
DC OUT LED
This LED is green, when the channel is set (by software) to 50 Ohm input impedance with an 8-
28V DC supply for a preamplifier. This is called the DC-50 Ohm mode.
rd
This LED is yellow, when the channel is set to 3 input mode with an 8-28V DC supply e.g. for a
rd
preamplifier. On default, 3 input mode means 200 Ohm. Note: The 200 Ohm resistor can be
replaced by another resistor or by a constant current diode in order to use a preamplifier with
ICP interface.
The DC OUT LED is OFF, when the channel is set to AC-mode. Then the connector does not
deliver DC and the input impedance is 100kOhm. Paralleling up to 20 channels in AC mode to
one in DC@50 Ohm mode does not cause a significant amplitude reduction.
BNC connector “odd channel No.” and “even channel No.”
The preamplifier output is to be connected to this socket over a BNC-BNC-cable. If a DC mode
is selected by software, this connector delivers the supply voltage (e.g. 28 VDC) to the
preamplifier and receives the AE-signal from the preamplifier. In pulsing mode, it delivers the
pulse and no DC-voltage.
When an ASIP-2 channel is sending pulses to a preamplifier, these are internally fed over a
36dB attenuator into the ASIP-2 channel and processed as a hit (to have an exact time stamp).
That means the pulse at the BNC connector is approx. 63 times the pulse amplitude measured
at the sending channel, multiplied by the gain factor of the preamplifier.
Example:
Measured 94dB => 50mV, preamp. gain 34dB => factor 50,
Pulse amplitude = 50mV * 63 * 50 = 157V
04-2017 file: amsy-6_opman.docm 24 of 149
AMSY-6 Operation Manual
3.4.3 Back panel elements
Figure 5: back panel elements of UD2.
Alarm connector
The Alarm connector provides access to 4 signals:
• Warning
• Alarm
• SP 0 and SP1 (two spare signals) for future developments
The respective pins are driven low by AMSY-6 (usually by use of the Alarm Manager) if the
Warning, Alarm, SP0 or SP1 LED is on. Hence the Alarm connector provides an interface for
external applications to read out the status of the LEDs. If the pins are driven low externally, the
according LED on the Control Panel will be switched on.
Externals Connector
The Externals Connector is a D-Sub connector which provides access to following functions
• External record control: enables or disables data acquisition. Driving pin #8 low disables
acquisition of AE- and TR-data.
• Control of the digital parametric counter PCTD: by use of pins 11 to 14 the PCTD can be
configured. Pin #11 is input for PCTD-Clock. Every rising and falling edge of digital signal
increments/decrements counter. Up-counting is enabled if pin 12 is set high, down-counting
if pin 12 is set low. PCTD is enabled if pin 13 is high, otherwise it is disabled. Pin 14
governs PCTD-reset: high or open resets counter, low enables storage of current counter
value. PCTD can only be reset if PCTD is enabled (pin13 is high).
• I²C interface (prepared for future functionality): I²C Bus can be extended through the
Externals connector, so application or user specific external extension modules could be
controlled by this bus. Since the I2C bus is controlled by the NIOS processor the
development of such modules can only be performed by Vallen Systeme. Currently it is
only in use for internal verification.
• User defined DAC Output (prepared for future functionality)
04-2017 file: amsy-6_opman.docm 25 of 149
AMSY-6 Operation Manual
• External trigger input (prepared for future functionality)
The Externals connector can be used in a master chassis only. In a slave chassis the signals
are undefined.
For detailed information see AMSY-6 System Specification.
USB port
The USB port is used for connection to a PC supporting USB 3.1 Gen 1. The 5V line on the
USB cable is not used in AMSY-6, so no USB-power is required.
A special USB connector type was chosen that avoids unwanted cable separation by extra
strong retention force.
Audio output
The audio jack is a 3,5mm TRS type connector with both audio channels driven from the same
mono signal. It can be used to connect either one passive 4 or 8 ohm speaker or two 8 ohm
speakers in parallel.
It is not allowed to connect a TS type connector (mono), a headphone or an active speaker to
this connector.
If an external audio device is attached, internal speaker is disabled. Internally 8 ohm speakers
are used, so parallel operation of one speaker at the rear and one speaker at the front is
possible (e.g. in MB19-V1).
The signal on the audio jack is chassis specific and identical with the signal for the internal
speaker.
Next / Prev. Port
In a multi chassis setup (see section 3.3) the participating chassis have to be connected in a
daisy chain via the Next Port / Prev. Port connector for time synchronisation reasons. Master
chassis must be the first of the chain.
Address selector
The rotary switch defines the address of the chassis, which can be any number between 1 and
9. In a multiple chassis setup (see section 3.3) each chassis must have a unique address. The
chassis with the lowest address is automatically the master chassis of the setup. A chassis with
address 0 or multiple coupled chassis with the same address are not allowed.
The Acquisition software automatically detects reports and rejects invalid address selection.
Pulse out
Each chassis has its own pulser module, generating pulses under control of software. Within
each chassis, this pulse goes to all ASIP-2 and to this BNC connector.
The Pulse out connector should only be used for equipment testing purposes.
The pulse at this connector can have up to 450Vpp, with approximately 2 µs rise time.
Connecting any other instrument (e.g. preamplifier without pulse-through function or an Ethernet
network) to this connector might cause permanent damage to such instruments.
04-2017 file: amsy-6_opman.docm 26 of 149
AMSY-6 Operation Manual
Ground Connector (element of power supply)
This connector can be used to ground AMSY-6 if proper grounding cannot be provided via the
power outlet. Use only this connector to ground the AMSY-6. It can also be used to ground a
conductive but floating test object.
04-2017 file: amsy-6_opman.docm 27 of 149
AMSY-6 Operation Manual
4 Extending hardware
AMSY-6 hardware was designed under the aspect of modularity. You can add new ASIP-2
boards to free slots of your chassis any time as long as it is disconnected from power. You can
extend the chassis with up to 8 parametric inputs. Even multiple chassis can be interconnected
to form one large measurement system. Following sections briefly describe the possibilities of
extending measurement hardware.
4.1 Adding ASIP-2
The AMSY-6 is completely modular. ASIP-2 boards can be added when the chassis has free
slots left. ASIP-2/S and ASIP-2/A can be operated in the same chassis. If both types of ASIP-2
boards are enabled in an AMSY-6, the 20MHz and 40MHz AE-sample rate for feature extraction
cannot be used (feature of ASIP-2/A).
Please refer to the Service Manual for information on how to mount or unmount ASIP-2 boards.
4.2 Adding external parameter inputs
A chassis, except for the MB2-V1, can hold up to 8 parametric inputs. Additional inputs can be
added until maximum possible input number is reached. An MB2-V1 can hold 4 parametric
inputs only.
A MB6-V1 chassis can be equipped with up to 8 parametric inputs without losing ASIP-2 slots. A
MB19-V1 chassis with 8 parametric inputs can hold a maximum of 17 ASIP-2 boards, only (two
less than an MB19-V1 with 4 parametric inputs).
04-2017 file: amsy-6_opman.docm 28 of 149
AMSY-6 Operation Manual
5 Mounting AE-Sensors
AE-sensors are the most important part in the measurement chain. Only signals picked up by
AE-sensors are available in data analysis. An unsuitable AE-sensor may not detect all relevant
elastic waves from AE-sources.
5.1 Basic information about AE-sensors
AE-sensors transform surface displacement into an electrical signal, which, after amplification,
can be processed by an ASIP-2.
Most AE-sensors rely on the piezo effect to transform a surface motion or displacement into an
electrical signal. A piezo sensor has the advantage that it is very sensitive and does not
saturate.
All Vallen AE-sensors are supported by an AMSY-6 (see separate document Acoustic Emission
Sensors). Additionally a wide range of other AE-sensors are supported as well (for correct setup
of measurement equipment see section 7).
An AE-sensor will usually need a preamplifier before a sensor signal can be processed by an
ASIP-2. A preamplifier can be integrated in a sensor or standalone. Therefore two types of AE-
sensors are available: AE-sensor with integral preamplifier and AE-sensors without one.
AE-sensors without integral preamplifier are usually smaller in size but need to be connected by
use of a sensor cable (SEC) to an external preamplifier. The SEC has to be thin and short in
order to minimize transmission losses of the sensor signal. This makes it prone to damage.
However standalone preamplifiers are a flexible solution since they can be used with various
different AE-sensors.
AE-sensors with integral preamplifier are usually larger than their counterpart without integral
preamplifier. Nevertheless they are a compact and easy to handle solution. They do not require
extra SEC and external preamplifier. AE-sensors with integral preamplifier can be connected to
an ASIP-2 using a strong BNC cable (RG58C/U).
AE-sensors are characterized by their frequency response, i.e. the sensitivity as a function of
frequency. Acoustic Emission basically distinguishes three frequency domains:
• Low frequency regime from approximately 20kHz to 100kHz. A low frequency regime is
utilized by measurements where the burst of an acoustic emission has to propagate a large
distance before it can be picked up by an AE-sensor (e.g.: detecting corrosion and leakage
in flat bottom storage tanks, monitoring concrete girders, etc.)
• Standard frequency regime from 100kHz to 300kHz. This frequency domain is used
predominately for integrity tests (e.g. pressure vessel testing). The most popular AE-sensor
is the VS150-RIC, a sensor with integral preamplifier, a frequency response in the range
from 90kHz to 400kHz and a peak response (resonance frequency) at approximately
150kHz.
• High frequency regime: any frequencies above 300kHz. Measurements utilize the high
frequency domain in very noise environment. By design, AE-sensors for high frequency
regime are very small. Hence, applications where small AE-sensors are a must utilize the
high frequency regime as well.
04-2017 file: amsy-6_opman.docm 29 of 149
AMSY-6 Operation Manual
5.2 Sensor mounting
An AE-sensor needs to be mounted firmly onto the test object. Vallen Systeme offers magnetic
lock downs (see the separate document Acoustic Emission Accessories for more information)
for this task. However, and in case of non-ferromagnetic surfaces, any other method is suitable
for mounting sensor onto the test object that provide for a
• Minimum contact force of 10N
• Constant contact pressure throughout the test (no aging effect or effect from changing
environmental conditions)
A coupling agent should be used as interface layer between test object surface and sensor. The
coupling agent reduces the transmission losses of acoustic energy. Coupling agents are usually
some sort of grease. Care has to be taken that the coupling agent is stable throughout the test.
5.3 Mounting verification
Once the sensors are mounted onto the test object, the quality of acoustic coupling to the test
object has to be checked. This check is one of the keys to good data acquisition. AE-sensor
mounting is usually verified by Hsu Nielsen sources. A Hsu-Nielsen source is a pencil lead
break of a 0.5mm 2H lead at a 30° angle to the surface (see separate document Acoustic
Emission Accessories for more information about Hsu Nielsen source). AE-sensor mounting is
considered good, if the responses of all AE-sensors to Hsu Nielsen sources differ less than 3dB.
For further details see section 20.2.
04-2017 file: amsy-6_opman.docm 30 of 149
AMSY-6 Operation Manual
6 Setting up preamplifiers
Preamplifiers are used to amplify and transform the high impedance signal of an AE-sensor to a
low impedance signal suitable for transmission over long distances with optimum signal-to-noise
ratio. Transmission distance can be several 100m.
A preamplifier is connected to an ASIP-2 board of a chassis by a single coaxial cable over
which preamplifier supply (28VDC), amplified AE signal, gain control information and test pulses
are transmitted.
In low-noise applications, the very first amplification stage of a measurement chain determines
the quality (signal to noise ratio) of the complete measurement chain. Subsequent stages of the
measurement chain amplify not only the desired signal, but also noise from the first amplification
stage. Best signal-to-noise ratio is achieved with a high gain of the very first amplification stage.
On the other hand, when high input voltages are expected, a high gain of the first stage would
saturate the measurement chain, hence the gain of the first stage must be lowered for
applications where strong signals are expected.
AE applications are so diverse that a fixed gain of the very first stage of the measurement chain
might not be the optimum for all applications.
Vallen Systeme offers three preamplifier models: AEP3, AEP4 and preamplifiers built into a
sensor case. All three models are available with various gain settings.
Pulse-Through
A chassis is able to generate an electrical pulse. Such a pulse can be used to excite the piezo
element in the sensor which will induce a surface displacement leading to excitation of a surface
wave. For an electrical pulse to reach the AE-sensor it has to by-pass the ASIP-2 and
preamplifier. Pulse-through describes the capability of a preamplifier to connect-through an
electrical pulse to an AE-sensor.
Automatic Sensor Test (AST)
This feature does not use a central pulsing module to generate an electrical pulse. Instead a
pulse is generated within a preamplifier under control of an ASIP-2. Vallen pre-amplifiers
supporting this function are in preparation.
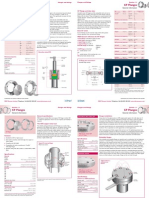
6.1 AEP3 Preamplifier
The AEP3 is a programmable gain preamplifier with single-ended and differential inputs and
pulse through capability. It has four external elements:
• “OUTPUT (+28V DC INPUT)" BNC connector: This connector is to be connected to the
BNC connector “DC” at the AMS3, AMSY4, AMSY-5 or AMSY-6 over a BNC-to-BNC cable.
• Single ended input connector (BNC): A single-ended (also called coaxial) sensor can be
connected to this socket.
• Differential input connector (BNO): A differential sensor can be connected to this 2-pole
BNC connector (also called BNO connector). A single ended AE sensor with BNC
connector does not fit onto this socket.
04-2017 file: amsy-6_opman.docm 31 of 149
AMSY-6 Operation Manual
• “INPUT” switch: This switch selects whether signals from the single-ended or from the
differential-ended connector are amplified by the preamplifier. This switch should be set
towards the used sensor connector.
• Internally AEP3 offers filter modules with sharp band pass filter characteristic as plug-ins. A
frequency range according to an application can be selected.
If the switch is set towards an empty connector, no AE signal can be amplified and sent to the
ASIP-2. With an empty input, the preamplifier output shows usually a higher noise
More information can be found in the separate document “Acoustic Emission Preamplifiers”
6.2 AEP4 Preamplifier
The model AEP4 preamplifier is more compact and has a slightly better signal to noise ratio
than the model AEP3. An AEP4 supports pulse through but does not offer differential input, or
sharp filters, or programmable gain. AEP4 preamplifier is available in following configurations:
• The model AEP4-IS integrates a sensor of model VSxxx-H or –M plus magnet holder. The
gain must be specified at order time to either 34 dB or 40 dB and cannot be changed later.
• The model AEP4H-ISTB houses a VS30-V sensor plus magnet holder and has 46 dB gain.
It is optimized for tank floor testing purposes.
6.3 AEP5 Preamplifier
The model AEP5 preamplifier is more compact and has a slightly better signal to noise ratio
than the model AEP3. An AEP5 supports pulse through but does not offer differential input, or
sharp filters, or programmable gain.
An AEP5 offers a combined 28V DC-input/signal-output BNC connector and a second BNC
connector for single ended sensors. Gain can be set by a switch to either 34 dB or 40 dB.
Derivative models of AEP5 is the AEP5H, which has a high pass cut-off frequency of 20 kHz
(instead of 2.5 kHz)
04-2017 file: amsy-6_opman.docm 32 of 149
AMSY-6 Operation Manual
7 How to perform data acquisition
AE Measurements are all taken from a one-dimensional time stream of digitized amplitudes in
µV, referenced to preamplifier input at each point in time in specified sampling steps (100ns,
50ns or 25ns, the latter two sampling intervals are only available with ASIP-2/A). Units for AE
measurements (and simple derivations of AE measurements) are voltage, time or combinations
of voltage and time. Measurements can be interpreted to obtain other results, for instance the
position of individual channels in combination with measured arrival time differences between
sensors can be used to perform location analysis work.
Acquisition program writes measurement data to two separate files:
• Primary data file: contains the AE-feature data in a free file format
• Transient data-file: contains the transient data in a free file format
7.1 Data Stored in Primary Data Files
Primary data files store characteristics from individual signals as processed by ASIP-2 boards.
For each signal exceeding detection threshold a data set is stored. A data set contains
characteristic attributes such as AE-channel number (CHAN) and a globally synchronized
timestamp for each channel to the sampling interval time resolution (time components DAY=day
of month, HH:MM:SS and MS.xxxx) for the first threshold crossing.
7.2 Signal Measurement
AE signals have been
traditionally reduced to 5
main attributes which are
commonly called the AE
parameter set. These
parameters are counts,
(peak) amplitude, energy,
rise time, and duration.
As an example, from the
transient signal at the
right, the parameters
measured are listed
below.
CHAN DAY HH:MM:SS MS.xxxx CNTS A ALIN E R D
[dB] [µV] [eu] [µs] [µs]
11 19 19:30:04 554.6679 7 53.2 456 96E-1 9.6 17.0
Meaning of the variables in the above snippet is as follows:
Column Parameter Description
CNTS Counts Number of positive threshold crossings (only
upwards)
A Amplitude in dBAE dBAE = 20 Log (Vsensor/1 µV)
04-2017 file: amsy-6_opman.docm 33 of 149
AMSY-6 Operation Manual
ALIN Amplitude in µV Vsensor= sensor output voltage
-18 -14 2
E Energy in energy units (eu) 1 eu= 10 Ws => 10 V s (True Energy)
1 eu= 1 nVs (Signal Strength Mode)
st
R Risetime 1 threshold crossing to peak
D Duration first to last threshold crossing
Since the generation of AE events are asynchronous (stochastic), the AE events do not always
readily separate from one another, especially at high AE event rates. The system requires
directives to detect (the threshold = voltage level to trigger a hit; see section 7.8.2) and separate
(duration discrimination time and the rearm time; see section 7.8.2) discrete AE bursts.
Two types of measurements are done which do not rely on the separation of individual hits:
• Status data e.g. root mean square status (RMSS). RMS is acquired for each channel for
time intervals of specified length. It averages just noise excluding hits.
• Parametric data: parametric data is acquired at certain time intervals (interval setting:
please refer to the online help file) independent of hits. Additionally parametric data sets are
stored in between the interval setting if hits occur.
7.3 Getting started with Acquisition
The Acquisition program manages acquisition parameters, the activation or deactivation of data
acquisition, the use of pulsing modes, the insertion of labels into primary data files, data storage
to hard disk, and the link of acquired data to on-line analysis programs like VisualAE.
The correct setup of the data acquisition requires a procedure which is divided into four steps:
1) Detecting the hardware and defining the input devices (see section 7.4 and 7.5)
2) Specifying the name of the data file (see section 7.7)
3) Setting up the acquisition parameters (see section 7.8)
4) Switching into record control mode (see section 7.9)
The subsequent and final step is starting the data recording (see section 7.9)
7.4 Hardware detection
Acquisition software requires a proper mapping of logical channel numbers to physical AE
processors. The logical channel numbers are user defined and will be used in the analysis
programs to identify the AE-channel. The physical AE processor constitutes a channel of an
ASIP-2.
When the program Acquisition is launched, it first analyses the chassis configuration connected
to the PC and compares it with the previously stored hardware configuration file. The result of
the hardware detection can be one of the following:
• No stored hardware configuration found because the chassis is connected the very first to
the PC or because the configuration file has been deleted (see section 7.4.1).
• No change in hardware configuration detected (see section 7.4.2).
• Change in hardware configuration detected (see section 7.4.3).
04-2017 file: amsy-6_opman.docm 34 of 149
AMSY-6 Operation Manual
7.4.1 Very first connection of PC to chassis
In this case, Acquisition can initiate a proper
channel mapping but cannot find any
assignment of input devices to AE signal
processors. As a result the window on the
right appears and must be confirmed by a
click on “OK“. This opens the “Hardware
Detection Results & Channel Configuration“
menu where the column “Input Devices“ is
colored in red.
Figure 6: hardware detection tab in Edit Mode after very first connection of a chassis to a PC
For a proper initiation and in order to continue with the acquisition setup, an input device per
channel has to be defined. Please see or continue to section 7.4.4 for more information.
7.4.2 No change in system configuration detected
If no changes to the hardware have been made, starting Acquisition program redirects directly
to Vallen Acquisition panel (see section 7.5.2). The Hardware Detection Results & Channel
Configuration menu can be opened if “Step 1” (see section 7.6) is selected.
04-2017 file: amsy-6_opman.docm 35 of 149
AMSY-6 Operation Manual
Figure 7: example of hardware detection result tab when no changes are detected
Status column (last column in menu shown in figure 7) shows “no change“. Channel mapping is
done properly and an input device is specified for each channel.
7.4.3 System configuration change detected
Changes will be detected if features in hardware or software configuration are added or
removed. If for example two systems are combined to form one large system with many AE
channels, the user has to specify a meaningful channel mapping, i.e. a unique logical channel
number is assigned to each hardware channel.
When channels were added or removed, the software always tries to keep the channel mapping
as specified in the hardware configuration file and adds new channel numbers when it detects
additional channels. If the proposed channel mapping is confusing or not as intended, click on
“More…/default mapping” to initiate a default channel mapping.
04-2017 file: amsy-6_opman.docm 36 of 149
AMSY-6 Operation Manual
Figure 8: example of the hardware detection result when two channels have been removed.
7.4.4 Changing channel configuration
A channel configuration can only be changed in Edit Mode (click on Edit Mode button to enter
the Edit Mode). Edit Mode allows changing:
• Logical channel number assignment
• Input device
• Pulser function, if selected input device supports it
• DC supply voltage, in case of ASIP-2/A for input devices +8-28V@50R and +8-28V@200R
• Commentary fields “Preamp. ID” and “Sensor ID”
04-2017 file: amsy-6_opman.docm 37 of 149
AMSY-6 Operation Manual
Figure 9: example of the Hardware Detection Results & Channel Configuration menu in Edit
Mode
Chan.
A graphical symbol in the “Chan.” column identifies the channel’s status. In the cell right to the
symbol a logical channel number can be specified.
HW
Values in cells of this column indicate the hardware address of a channel in format xx.yy.z.
xx indicates number of chassis as set by address selector switch at rear side of a chassis.
yy indicates the address of an ASIP-2 board.
z indicates one of the two channels of an ASIP-2 board. z can be “a” or “b”.
Input device
For more information see section 7.5.
Pulser func.
The pulser function can be set to “None”, “Pulse-through” or “AST” (automatic sensor test). A
“None” setting prohibits that a pulse is connected through to the preamplifier/sensor of the
channel. Such a setting is useful in case preamplifiers are used that do not support pulsing
function.
If an input device is selected that does not support “Pulse-through” or “AST” no changes can be
made.
04-2017 file: amsy-6_opman.docm 38 of 149
AMSY-6 Operation Manual
DC
The “DC” column shows the preamplifier supply voltage that will be initiated for the channel. The
DC setting can only be changed for input devices that the ASIP-2/A offers (for more information
see section ).
All Vallen preamplifiers use 28V. However, different brand preamplifiers may require less supply
voltage.
Preamp. ID and Sensor ID
Fields in this column are purely commentary fields. They have no effect on the acquisition. They
can be used to keep track of the preamplifiers and sensors used during a test.
Whenever changes were made by the user in the configuration menu the hardware detection is
repeated.
7.5 Defining ASIP-2 input devices
The Acquisition needs to be told what kind of preamplifier or sensor with integral preamplifier is
connected to the ASIP-2 AE-channel. Based on the type of preamplifier or sensor with integral
preamplifier it initiates the correct supply voltage, input impedance, gain setting and pulser
function.
An input device simplifies selection of a correct configuration for an AE-channel.
For each Vallen preamplifier and sensor with integral preamplifier a dedicated input device
setting exists. Additionally 5 more generic input devices exist:
• AC Input@100K (0dB/34dB): no DC voltage is supplied and the channel’s input impedance
is set to 100kOhm. This channel configuration should be used if the channel is operated in
parallel to another one.
• +28V@50Ohm (34dB/40dB): 28V supply is provided; input impedance is set to 50Ohm.
“Pulse-through” is disabled (“None”).
• +8-28V@50Ohm: a variable supply voltage can be initiated. The input impedance is set to
50Ohm. This input device is only available with ASIP-2/A
• +8-28V@200Ohm: a variable supply voltage can be initiated. The input impedance is set to
200Ohm. This input device is only available with ASIP-2/A
Input device settings and channel mapping is stored in a file called y5detect.vhw (stored to
install root path/bin/). By deleting this file an initiation is forced at next start up leading to input
device definition as described in section 7.4.1.
04-2017 file: amsy-6_opman.docm 39 of 149
AMSY-6 Operation Manual
Figure 10: example of selection of input devices for ASIP-2/A signal processor
Clicking on a cell in the column “Input Device” will activate the cell (see the “…” symbol). A list of
input devices expands if the “…” symbol is clicked. An appropriate input device has to be
selected out of the offered selection. For copying the same input device to the next channel, the
user only needs to enter <+> into the target cell. By keeping the <+>-key pressed, all channels
of same signal processor model get the same input device assigned quickly and conveniently.
If a preamplifier is not listed, one of the generic devices, like “28V@50Ohm” may be selected as
input device. This results in a 28VDC supply at the BNC connector and input impedance of
50Ohm The assumed gain of an input devices is shown in parenthesis and can be modified in
the AE channel setup dialog under “calculated gain” (see section 7.8.2).
For connecting devices that do not allow a DC voltage on the signal line, the generic device
“AC-input@100K” can be selected. This is also the right selection for a signal processor that is
paralleled to one that supplies a preamplifier. Any number of signal processors with “AC-
input@100K” can be paralleled without disturbing the accuracy.
Choose “AC-input@100K” as input device for channels to which neither a preamplifier nor a
sensor with integral preamplifier is connected. In this case no DC voltage is applied to the BNC
connector. The input impedance is 100kOhm.
When the system configuration is properly initiated and displayed, the user may click on
“Confirm” storing the configuration to a file.
7.5.1 Channel configuration for individual chassis
Many users own multiple systems, and individual staff members own their individual acquisition
PC, so they move their PC from one system to another one, as the need arises.
In such cases it is convenient storing the hardware configuration of each chassis locally on his
laptop. This can be done by use of the “Export configuration…“ function which can be found by
clicking the “More…“ button. Specify a file name which identifies the chassis to which the
04-2017 file: amsy-6_opman.docm 40 of 149
AMSY-6 Operation Manual
configuration file applies (e.g. the Id-number of the chassis). The hardware configuration can be
imported by use of the “Import configuration…” function.
Figure 11: configuration files can be imported via “More…” button and selecting “Import
configuration…”
7.5.2 Finishing hardware detection
Once the hardware settings are initiated in a correct manner the settings need to be confirmed.
By doing so the hardware configuration is stored to a file and used by default when the
Acquisition is launched the next time. After confirming the settings the View Mode window
opens and shows the current hardware configuration.
7.6 Acquisition Setup
Finishing hardware detection will open the
Acquisition Setup screen. An operator can repeat
hardware detection by clicking “Step 1” e.g. for
changing channel mapping. An operator may
continue by clicking “Step 2” and specifying an
acquisition file (see chapter 7.7).
04-2017 file: amsy-6_opman.docm 41 of 149
AMSY-6 Operation Manual
7.7 Acquisition File
Selecting “Step 2: File: ..” (see section 7.6) calls up a file selection menu. A new acquisition
setup file can be created or an already existing file can be selected. In the latter case the stored
acquisition parameters will be used and acquired data will be appended to already existing data
files. Acquisition setup files are identified by .vac file extension.
The filename of a newly created acquisition setup file will also be used for all associated data
files such as:
• Primary data file (with extension .pridb)
• Transient recorder data files (with extension .tradb)
• Transient recorder feature files (with extension .trfdb)
• VisualAE set-up files (with extension .vae)
• VisualTR set-up files (with extension .vtr)
If a new acquisition file is created, a pop up dialog will appear requesting to choose an
acquisition parameter setup. Acquisition parameters can be imported from a library, another
acquisition setup file or from factory defaults for certain applications.
In addition to files listed above Acquisition reports internal actions and results in the file
c:\vallen\log\acqui32.log. Whenever Acquisition is closed, this file is copied to the path of the
VAC file and renamed to VACFILENAME.Y5ACQ32.LOG.
Whenever you need support with data acquisition, please send us the log file that was acquired
while the problem occurred.
7.8 Acquisition Settings
"Step 3: Acquisition Parameter Setup" calls a dialog for programming the AE hardware settings.
There are seven different settings pages that can be accessed by tabs at the top of the dialog:
• General Settings: The acquisition parameters of digital waveforms (sample rate, size of
page) are set here. Faster sample rates and larger samples per waveform increase the
resolution of the waveforms, while slower sample rate and less samples per waveform
minimize the needed disk space and TR-data transfer. The AE sample rate (for feature
extraction) is specified here as well (General AE-Settings group).
• AE-Channels: The traditional settings (threshold, gain, hit-timing, etc and waveform settings
(pre-trigger, trigger mode) as well as filter and notch filter (ASIP-2/A only) settings can be
made here.
• Parametric: Definition of parameters for the recording of external parametric inputs is made
in this tab.
• Data: specifies which attributes are stored to hard disk drive and are available for analysis.
Make sure to check that all the attributes you need for data analysis. Data attributes that
are not selected are not available to analysis.
• Frontend Filter: The front end filter can be activated and defined here.
• Pulser: It contains the settings for the pulser for the sensor coupling test
• Special: This setting dialog is used for changing between true energy and signal strength
and others.
04-2017 file: amsy-6_opman.docm 42 of 149
AMSY-6 Operation Manual
• Comment: It provides an area which allows test notes to be stored with the AE data.
When a new acquisition file is created all acquisition settings are already initiated either be
default settings coming from the factory default setup or by user settings coming from a library
or any other vac-file.
Online help file provides detailed information about dialogs and settings.
7.8.1 General Settings
General Settings contains settings that are applied globally to all AE-channels. This is for one
thing the AE-data sample rate (group AE data) and the way transient data is recorded (group
TR data).
The AE-data sample rate for feature extraction can be set if the AMSY-6 contains ASIP-2/A
only. Otherwise (in case of a mixed ASIP-2/S and ASIP-2/A system) the AE-sample rate for
feature extraction is by default 10MHz. This corresponds to an arrival time resolution of 100ns.
The highest possible arrival time resolution is 25ns.
Transient data can be recorded in two different modes: duration adapted- or fixed page length
recording mode. Fixed page length recording mode was the standard recording mode in the
past. Fixed page length recording means that a specified number of samples is recorded per
trigger. Only the beginning of a burst signal is recorded if the page length is shorter than the
duration of it. On the other hand, a lot of noise and even more hits can be recorded if the page
length is longer than the burst signal duration. In the first case one loses information about the
transient. In the second case a lot of storage space is wasted by unnecessary recording of
noise and the assignment of TR data to hit data becomes more difficult.
In duration adapted recording mode a burst signal is recorded starting from a defined number
samples before the first threshold crossing (“PreTrg”) up to a defined number of samples after
the last threshold crossing (“PostDur”). “PreTrg” is the number of pre trigger samples and
“PostDur” the number of post duration samples. As a result a TR-page always contains one full
hit. A short hit will occupy only a small storage space, a long hit will occupy a larger storage
space. In the end data is stored more efficient and the load on the bus system is less, improving
the data transfer performance of an AMSY-6 system. Even when hits of short and long
durations occur in a high rate per second, each hit gets its own TR-page and its own TR-Index.
In case of duration adapted recording mode a maximum number of samples per set has to be
specified. The maximum number of samples is 2,097,152 samples. A TR-sample rate less than
40MHz has to be chosen in order to make sure that the longest possible hit with a duration of
104.8576ms can be recorded to a TR-page.
04-2017 file: amsy-6_opman.docm 43 of 149
AMSY-6 Operation Manual
Figure 12: example of General Settings tab, with duration adapted TR enabled.
7.8.2 AE-Channels
AE-channel setup is most important acquisition parameter setup. It defines start and end criteria
of hits, the filter settings, transient record trigger settings and gain setting of each channel
individually. Double clicking on a channel will open the channel’s edit menu.
Main settings for most tests are:
• Threshold
• Rearm Time (RAT)
• Duration Discrimination Time (DDT)
• Application specific filters
These settings are usually adjusted to achieve the following goals:
• Optimize sensitivity range while limiting false-hits from noise (governed by threshold)
• Limit overlap of hits (governed by DDT)
• Prevent reflections from effecting AE parameters (governed by RAT)
• Increase signal to noise ratio (governed by application specific filters)
Initial settings for threshold, rearm time and duration discrimination time may be:
Material Threshold Rearm Time Duration Discrimination Time
[dBAE] [ms] [ms]
Metals 30 - 40 1,0 – 4,0 0,40 – 2,00
FRP 40 - 55 0,3 – 2,0 0,15 – 1,00
The settings, especially the threshold setting, can and should be determined experimentally.
The start of a hit is easily determined by the first threshold crossing. In order to detect a first
threshold crossing it must be made sure that a previous hit has ended. A hit has ended when
Duration Discrimination time (DDT) given in µs expired without any threshold crossing. After
04-2017 file: amsy-6_opman.docm 44 of 149
AMSY-6 Operation Manual
expiration of DDT the remaining burst signal features are determined: burst signal energy, burst
signal duration and ring down counts.
An additional time criterion, Rearm time (RAT), governs whether a hit belongs to a hit cascade.
A hit cascade should group together all hits that arise out of reflections of the propagating
elastic wave that originates from a source. A first hit of a hit cascade is detected when the time
difference between last end of hit and first threshold crossing is larger than RAT.
Figure 13: AE-channels tab with summary of settings. Double click on a channel will open its
edit menu
Factory defaults such as Metallic Pressure Vessel, Composite Pressure Vessel, Tank Floor
Standard or Fatigue Test contain default settings for these applications. Nevertheless
acquisition parameters must be fine-tuned for a specific test object.
Threshold
Determining the correct threshold setting is often defined in the test instruction. If a test
instruction is not required for an AE-measurement, a detection threshold can be determined by
following procedure:
A good practice determining an acquisition threshold is by acquiring data with a low threshold
for 5 to 10 minutes. A low threshold setting would be 22dBAE to 24dBAE. Environmental
conditions during this “noise” test have to be similar compared to the actual test (e.g. pump is
running, etc.). The peak noise amplitude within this period has to be determined. Adding 6dB to
this peak noise amplitude will result in a good threshold setting.
Rearm time
Rearm time is governed by the lifetime of a burst emitted by an AE-source. Rearm time should
be in the order of burst lifetime. Lifetime determines when maximum amplitude of a burst falls
below detection threshold. Hence lifetime is a function of the strength of an AE-source and
attenuation of the material.
Calculating lifetime needs knowledge of
• attenuation per unit distance (α),
• expected maximum strength of a source (peak amplitude, Apk),
• detection threshold (Adet) and
• speed of sound (c) in the material.
04-2017 file: amsy-6_opman.docm 45 of 149
AMSY-6 Operation Manual
Lifetime of a burst can be calculated as follows
A pk − Adet
t life =
αc
Usually an artificial source, such as the Hsu Nielsen source can be used in determining burst
lifetime. Rearm time should be chosen in range of burst lifetime.
Duration Discrimination time
The Duration Discrimination time should be a little bit less than the time difference between end
of a hit and begin of the first reflection. However, determining this time period may not be
possible because in small structures AE-signals may overlap and a discrimination time cannot
be determined.
Suggested settings for Duration Discrimination time can be found in table above or in factory
default settings provided with Acquisition program.
Application specific filter
Application specific filters limit the frequency range of the AE-signal and hence increase the
signal to noise ratio. Application specific filter should match the AE-sensor and the application.
The ASIP-2/S offers 8 application specific filters while the ASIP-2/A offers over 500.
For the different frequency regimes see section 5.1 about AE-sensors.
Figure 14: example of AE-Channel setting
TR-Acquisition Parameters
For more information, please see chapter 7.9.
Input Settings
This section summarizes input device settings. It is important to check “Calc. gain” setting,
which must correspond to gain of the input device plus additional gain of Range setting.
Otherwise amplitudes will be over- or underestimated.
04-2017 file: amsy-6_opman.docm 46 of 149
AMSY-6 Operation Manual
Range setting is only available with ASIP-2/A and lets one specify an additional gain of 0dB,
6dB or 12dB. Input range of ASIP-2 in general is ±5V (10Vpp). Range selection adapts input
range of ASIP-2. It can be to 10Vpp (factory default, corresponds to 0dB extra gain), 5Vpp
(corresponds to 6dB extra gain) or 2.5Vpp (corresponds to 12dB extra gain). In case of weak AE-
signals an extra gain may be necessary to utilize the full bandwidth of ASIP-2 input range.
Digital Filter Settings
This section specifies application specific band pass filter settings. All filters are implemented
digitally and can be chosen from a filter matrix.
Notch Filter Stages
A notch filter can be defined which rejects up to 4 frequencies. Each stage resembles a notch
nd
filter of 2 order. A notch filter is useful if one wants to reject a interfering ultra sound frequency
as emitted by liquid fill-level meters.
7.8.3 Parametric Input Settings
Settings for parametric channels are governed on tab called “Parametric”.
Figure 15: example of AE-Channel setting
Parametric Timing
Interval specifies the time interval between stored parametric data sets during time periods in
which no hits are detected. The data sets generated in this time interval (0.2ms..600s) are
called time driven parametric data. Parametric data sets are stored more often while hits are
detected. (See “clock”). These data sets are called hit driven parametric data.
Clock defines the parametric sampling interval (0,2 to 10ms). Clock values less than 1ms should
be avoided for large channel applications. Otherwise the bus gets overloaded with parametric
data.
PCTA-Trigger (PA0)
Level and Hysteresis settings are used for cycle counting. PCTA is a counter that an increase
by one every time the voltage at the parametric input PA0 has passed through the hysteresis
band from Level + Hysteresis to Level.
04-2017 file: amsy-6_opman.docm 47 of 149
AMSY-6 Operation Manual
PCTD is a digital counter accessible via specific pins in the "Externals" connector on the rear of
the chassis (see AMSY-6 Getting Started Manual for a detailed description of the pin usage). If
pin 14 of the "Externals" connector is high (or open), then PCTD is set to 0, if pin 14 is low
PCTD stores the current value.
Record Control
Recording is disabled if the voltage at the parametric input specified by "PAx input" exceeds the
upper limit. Also, recording is disabled if the voltage at the parametric input specified by "PAx
input" is below the lower limit.
7.9 Transient Data recording modes
AMSY-6 supports two different transient recording modes. The standard mode of recording data
was fixed page length recording in the past. Fixed page length recording means that the page
length, i.e. the number of samples that are recorded, is set to a fixed value during acquisition
parameter setup. The page length is valid for all channels. A consequence of fixed page length
recording is that a page can be too short for a burst signal. In this case the page contains the
first n samples of a hit. On the other hand a page can be too long for hits as well. In such a case
a lot of noise is recorded wasting disk space; or a page could contain subsequent hits as well.
This would exclude subsequent hits from any analysis in the FFT domain.
An alternative transient recording mode is duration adapted transient recording. In this recording
mode a hit is recorded from the first threshold crossing to the last threshold crossing,
irrespective of its length. This means a short hit will occupy only small memory, while a long hit
will occupy more of memory. Additionally to hit samples a specified number pre-trigger- and
post duration samples are also recorded.
7.9.1 Fixed page length recording
Fixed page length recording is enabled when checkbox “Duration adapted TR” is not checked
(see section 7.8.1, figure 12). Figure 16 shows the AE-channel settings tab when fixed page
length recording is enabled.
• Pretrigger samples define the number of samples which are recorded before trigger.
• Data select is only available with ASIP-2/A and lets one select a data source for transient
data. Available data sources are FIR, IIR4 or IIR5. Selecting FIR as data source results in
recording of unfiltered transient data. IIR4 data source is after application specific filters
(see Digital Filter Settings) while IIR5 data source is after notch filter.
Transient data source FIR is especially useful if one wants to record transients with wideband
filter settings but narrow band hit-triggering.
04-2017 file: amsy-6_opman.docm 48 of 149
AMSY-6 Operation Manual
Figure 16: example of AE-Channel setting – fixed page length transient recording
7.9.2 Duration adapted transient recording
Duration adapted transient recording is enabled when checkbox “Duration adapted TR” is
checked (see section 7.8.1, figure 12). Figure 17 shows the AE-channel settings tab when
duration adapted transient recording is enabled.
Figure 17: example of AE-Channel setting – duration adapted transient recording
• Pre-trigger samples define the number of samples which are recorded before the trigger.
• Post-duration samples define the number of samples which are recorded after the last
threshold crossing
04-2017 file: amsy-6_opman.docm 49 of 149
AMSY-6 Operation Manual
• Data select is only available with ASIP-2/A and lets one select a data source for transient
data. Available data sources are FIR, IIR4 or IIR5. Selecting FIR as data source results in
recording of unfiltered transient data. IIR4 data source is after application specific filters
(see Digital Filter Settings) while IIR5 data source is after notch filter.
7.9.3 Trigger groups and Trigger modes
A subset of channels, even across different chassis, can be assigned to a trigger group. Trigger
modes are applied per Trigger Group. The first hit channel of a Trigger Group triggers the other
channels according to the selected modes. Each channel can be assigned to one Trigger
Group, only. A maximum of 256 trigger groups can be defined. Each trigger group is identified
by a unique integer in the range from 0 to 255. By default each channel for which a trigger mode
other than Normal is selected is assigned to the trigger group with ID=0. The ID can be changed
to the requirements of the measurement setup.
A Trigger mode defines the way transient recordings are triggered. In “Normal” and “Master”
mode transient recording is triggered when a first threshold crossing occurs. In “Slave” mode
transient recording of a channel is triggered by a “Master” or “Pool” channel. A “Pool” channel
may act as “Master” if it is hit first or “Slave” in any other case.
7.10 Continuous Mode data acquisition
Section 7.8, Acquisition Settings, describes setting up Acquisition for a hit based measurement,
where a threshold crossing starts the hit processing and it is stopped when the signal drops
below threshold for a certain period of time. Contrary to hit based measurement the Continuous
Mode recording acquires data independent of threshold crossing. Continuous Mode recording
starts with a start trigger (i.e. switching record on) and ends with an end trigger (switching
record off). In between these triggers data is continuously recorded.
Continuous Mode recording is also known as streaming mode. Both terms are always used in
context with streaming of waveform data, i.e. continuously and seamlessly recording a sampled
signal. With AMSY-6 this can be achieved:
• Without time limitation if data generation rate is less than 35MB/s for one chassis (e.g.1
channel at sample rate of 10MHz)
• Without time limitation if data generation rate is less than 35MB/s per chassis in multi
chassis setup and data transfer limit of USB bus or hard disk drive controller is not
exceeded
• Time limited for up to 254 AE-channels in parallel. Length of streaming period depends on
sample rate and transient recorder memory size.
Single chassis streaming performance of an MB6-V1
No of Chan. Max sample rate per channel for streaming
3 5 MHz
6 2.5MHz
9 1.67MHz
12 1.25MHz
An AMSY distinguishes between AE-feature data and transient data. First and foremost
Continuous Mode recording will acquire AE-feature data. Additionally transient data can be
04-2017 file: amsy-6_opman.docm 50 of 149
AMSY-6 Operation Manual
recorded as well. In practice setting up Continuous Mode recording is done the other way
around. First you setup transient recording, then AE-feature data recording.
1) Go to “Special” tab and check the
box next to Continuous Mode. This
enables continuous recording. As
a result definition of threshold,
duration discrimination time and
rearm time are no longer valid.
In Continuous Mode recording the
time stream of data is divided into
time slices of equal length.
For each time slice an AE-feature
data set is generated. The start of
each time slice triggers transient
data recording.
2) Start with setting up transient data
recording. Large time slices (TR
page lengths) reduce the data load
on internal bus. A time slice length
of approximately 1ms to 10ms is
ok. In this example sample rate
and samples per set were chosen
in such a way that resulting page
length is 819.2µs. In order to
record transient data seamlessly,
time slice length of AE-feature
data extraction has to be set to
same length.
3) The length of a time slice for AE-
feature extraction is defined in the
field of parameter Duration
Discrimination Time (DDT). Even
though you use this field to specify
length of time slice it has nothing
to do with DDT.
A threshold can be selected, but
has no effect on data acquisition.
Threshold has effect on AE-
feature data generation, e.g.
counts feature.
Following AE-features can be
used for analysis: peak amplitude,
energy and counts.
Please note that before R2014.0414 the length of a time slice was specified in field Rearm
Time (RAT)
Features like signal duration and rise time are extracted but have different meaning for
analysis of data acquired in Continuous Mode.
04-2017 file: amsy-6_opman.docm 51 of 149
AMSY-6 Operation Manual
7.11 Data Recording
This menu controls on-line communication
between the user and both the data file and the
AE-acquisition hardware. The "Record" button
begins acquisition. “Pause” will halt acquisition
while “Stop” returns to the Acquisition Setup (see
section 7.6.
“Start Pulsing” and “Label” buttons will be available
once software is in recording mode (i.e. “Record”
button is pushed. “Start pulsing” initiates pulsing
either for
• A single channel for indefinite time (i.e. until manually stopped by user),
• All available channels in repeating succession for indefinite time,
• All available channels in succession for one time.
“Label” allows inserting user text with a time stamp into acquired data stream. A label may
indicate certain interesting occasions during a test or can be used to structure the test
sequence. During analysis labels can be used as starting- or halt points.
04-2017 file: amsy-6_opman.docm 52 of 149
AMSY-6 Operation Manual
8 Introduction to data analysis
Analysis of data is a process of inspecting, cleaning, transforming, and modeling data with the
goal of highlighting useful information, suggesting conclusions, and supporting decision making.
Data analysis is a process, within which several phases can be distinguished:
• Data cleaning: Data cleaning is an important procedure during which the data are
inspected, and erroneous data are—if necessary, preferable, and possible—corrected.
During subsequent manipulations of the data, information should always be cumulatively
retrievable. In other words, it should always be possible to undo any data set alterations.
Therefore, it is important not to throw information away at any stage in the data cleaning
phase.
• Assessment of data quality: this phase is guided by the following questions: (1) how is the
quality of data, (2) the quality of measurement and (3) are there any data distortions.
• Main data analysis (answer the original research question) and reporting.
The Vallen AE-Suite software provides the tools for successful data analysis. Especially
VisualAE™, VisualTR™ and VisualClass™ establish a powerful set of AE-analysis software.
VisualAE™ supports an unlimited number of 2D and 3D graphs on multiple pages, any
combination of results, in-line filtering, many location algorithms, clustering, and more.
VisualTR™ is the ideal tool for a closer look at waveform data, with digital filtering, mode-
selection using Gaussian cross-correlations, digital filtering, and includes a set of tools to
manage learning data for signal classification.
VisualClass™ is a powerful tool for the development of a waveform classifier. The classification
process assigns a class number and class-distance to each hit which are then stored on a so-
called feature file. VisualAE™ can read that feature file and correlate the classification results
with AE-parameters, external parameters, location results etc.
In addition, ActiveX-routines are now available through which a user-written program can read
waveform data and write feature data that can be processed by VisualAE. This helps the user to
concentrate on the feature extraction development using the programming language he likes,
because ActiveX-routines can be used with any 32-bit Windows programming environment.
8.1 VisualAE Overview
VisualAE is a framework for all data analysis tasks. It represents data in Visuals, processes data
by use of Processors and unifies analysis of AE-feature data, transient recorder data and
frequency domain feature data.
04-2017 file: amsy-6_opman.docm 53 of 149
AMSY-6 Operation Manual
While VisualAE or any other analysis tool of the AE-Suite software is able to process acquired
raw data, it cannot make modifications to raw data (i.e. it cannot modify primary or transient
data files).
04-2017 file: amsy-6_opman.docm 54 of 149
AMSY-6 Operation Manual
8.1.1 Relation of VisualAE to Acquisition
The program "Acquisition" performs high-speed data acquisition at very high reliability. Data is
stored to hard disk in a very efficient format. Any single data set which is written to disk can be
read by the analysis software VisualAE or VisualTR immediately. Acquisition and VisualAE or
VisualTR are separate applications and can run independently from each other. As data is time
sorted before it is stored to disk, location calculation is possible online and without any
restrictions. A special communication module, the Scheduler, takes care that each analysis
program is aware of data sets which have just been acquired. Of course offline analysis can be
performed as well, even during the acquisition of another data file.
8.1.2 Analysis using VisualAE
During analysis data is read by VisualAE from the HDD (hard disk drive) and then processed in
a processing tree. Analysis with VisualAE may contain 3 types of elements:
• Data Source: the file containing the raw data. It contains the binary AE-feature data with
references to transients stored in the transient data file, plus the transient data file
• Data Processing (by use of processors) performs operations on data, such as location
calculation, filtering, clustering and the evaluation of user-defined results
• Data Presentation (by use of Visuals) visualizes selected results in graphical or numerical
form.
8.1.3 Data Processing
Data processing is done by use of processors. Each processor acts as a node and will add a
branch to the data stream. Processors such as the location processor will add results to the
data stream of the branch they introduce. The Filter processor, as an exception, will reject data,
i.e. remove data from subsequent data stream. Even though processors manipulate data, they
are not allowed to make modifications to the raw data file, the root element of the data stream.
The data stream can be directed through several parallel or subsequent processor nodes for
calculations and/or filtering. There is no limit (apart from the PC resources) to the number and
nesting of processors in use.
The results of the processors (or the raw data source) are presented in Visuals, which can be
diagrams or listings. The Visuals will act as a data sink. Any number of Visuals can be attached
to a processor node.
Figure 18 shows an example of a Data Processing Structure: A tree-structure can be created,
starting from the data source (the “root” on top) and splitting up into several branches if
required. The sequence of the processors is not fixed, but depends on the requirements of the
analysis. To make the results accessible each “branch” requires a Visual. This structure allows
one to easily perform complex and powerful data processing.
04-2017 file: amsy-6_opman.docm 55 of 149
AMSY-6 Operation Manual
Figure 18: example of a Data Processing Structure
8.2 Event Builder
The term “acoustic emission event” refers to the process of an AE-source emitting an elastic
wave. The propagating elastic wave can be picked up by more than one AE-sensor creating a
characteristic sequence of hits in the data stream.
The Event Builder is part of the location processor. Its task is to group hits into a so called event
data set. Ideally an event data set contains only hits of one AE-event. In this case the event
data set contains the time representation of the propagating elastic wave front. The results of
the Event Builder can be used for zonal location or as input to a location algorithm (see section
8.3).
The Event Builder requires 3 set-up parameters abbreviated FHCDT, DT1X-Max and
DTNX-Max, next to a list of channels of which hits may contribute to an event data set.
04-2017 file: amsy-6_opman.docm 56 of 149
AMSY-6 Operation Manual
The set-up parameters are found
in the Event Builder tab of the
Location Processor setup. The
"Channels" group of the dialog
specifies channels of which hits
can contribute to an event data
set. Furthermore, each channel
can be assigned a special
function, describing the behavior
of which during event data set
building. Function of a channel
can be "normal", "guard",
"combined" or “unused”.
The “Event assembling time Figure 19: example of Event Builder set up
criteria” group contains the setup
parameters FHCDT, DT1X-Max,
DTNX-Max.
8.2.1 Assembling individual hits into an event data set (FHCDT condition)
The main task of the Event Builder is identifying a first hit of a hit sequence caused by an
acoustic emission event. Subsequent hits of the sequence will contribute to an event data set.
When acoustic emission events are well separated in time then their hit sequences are also well
separated in time. This separation in time, when no hits occur, is used to determine a first hit
caused by an acoustic emission event.
Identifying a first hit is achieved by a data processing condition based on the First Hit Channel
Discrimination Time (FHCDT) parameter. This condition determines the arrival time difference to
the latest hit occurred before. Evaluation of this condition yields two results:
• Arrival time difference is larger than FHCDT: the currently processed hit is a first hit caused
by an acoustic emission event. An active assembling process is closed if a first hit is
detected. A new event assembling process is started.
• Arrival time difference is less than FHCDT: If an event assembling process is active the
currently processed hit is considered to be a sub-hit of an active event data set.
An example of two hit sequences is shown in figure 20. The graph shows time axes (x-axis) of 4
different AE-channels labeled channel 1 to channel 4. Deltoid shaped objects indicate hits that
occur in these channels. The deltoid shape shall represent the characteristic of hits having a
short rise time and longer ring down. The left corner of the deltoid shaped object indicates the
arrival time, i.e. the first threshold crossing. The first hit sequence, hits marked 1 to 4, is
separated by a period of ∆t54 from a second hit sequence, consisting of hits marked 5 to 7.
FHCDT has to be smaller than ∆t54 in order that the Event Builder is able to identify hit marked 5
as a first hit. On the other hand FHCDT has to be larger than the largest time difference
between two consecutive hits of an event data set in order that hits 1 to 4 or similarly hits 5 to 7
are grouped into an event data set.
04-2017 file: amsy-6_opman.docm 57 of 149
AMSY-6 Operation Manual
Figure 20: two hit sequences separated in time. Their arrival time differences are indicated. It is
assumed that ∆t10 is larger than FHCDT.
A propagating elastic wave can be picked up by an AE-sensor more than once for two reasons:
• An elastic wave can be reflected off an interface. The returning elastic wave is picked up by
AE-sensors again if it has still enough energy that its AE-signal causes a crossing of
detection threshold.
• An elastic wave is propagating around a closed surface, as in the case of a cylindrical- or
spherical hull. After it circulated the hull it causes detection of hit(s) if it has still enough
energy that its AE-signal causes a crossing of detection threshold.
Ideally second-, third-, etc. hits should be assigned to a hit-cascade based on the Rearm Time
condition as a function of the AE signal processor. A hit of a hit-cascade cannot be a first hit of
an event data set. In cases the Rearm Time was chosen too small, FHCDT condition shall
prohibit that a reflected- or circulating elastic wave causes a first hit. The FHCDT should be
slightly larger than the time it takes for the reflected- or circulating elastic wave to reach an AE-
sensor again. Setting FHCDT to the order of the lifetime of an elastic wave is a conservative
way of estimating it. The lifetime is the time it takes for an elastic wave to be attenuated low
enough that an AE-sensor’s response to it does not cause a crossing of detection threshold.
Furthermore, the time window for assembling hits into an event data set should not exceed the
lifetime of an elastic wave. All hits within such a time window are likely to have originated from
the same AE-event and therefore should form an event data set.
Similarly to Rearm Time (see section 7.8.2) the lifetime on an elastic wave is calculated as
follows. Let α and c be the attenuation and speed of sound, respectively. Both parameters have
been measured. Let Apk be the maximum peak amplitude of an AE-event and Adet the detection
threshold. The lifetime, tlife, of an elastic wave is
𝐴𝑝𝑝 − 𝐴𝑑𝑑𝑑
𝑡𝑙𝑙𝑙𝑙 =
𝛼𝑐
The FHCDT should have some safety margin in it so it is recommended to set it as follows:
𝐹𝐹𝐹𝐹𝐹 = 1.5 × 𝑡𝑙𝑙𝑙𝑙
04-2017 file: amsy-6_opman.docm 58 of 149
AMSY-6 Operation Manual
8.2.2 Additional conditions for terminating an event data set assembling
process (DT1X-Max and DTNX-Max)
The data processing criterion based on FHCDT determines a first hit of an event data set and
what hits belong to it. An active event data set is automatically closed when a first hit is
detected. There are three more conditions to close an event data set before a new first hit is
detected:
1. DT1X-Max condition: an event data set is closed when a time period of DT1X-Max has
elapsed after the first hit of an event data set. DT1X-Max condition is evaluated with every
timestamp, whether it comes from a hit-, parametric- or status data set.
2. DTNX-Max condition: an event data set is closed when a time period of DTNX-Max has
elapsed after the previous hit of an active event data set. DTNX-Max condition is evaluated
with every timestamp, whether it comes from a hit-, parametric- or status data set.
3. A channel that contributed already a hit to an event data set receives a second hit while the
event data set is still active. Checking the “Allow multiple hits per channel” checkbox of the
Event builder tab (see figure 19) disables this condition.
DT1X-Max can be related to the AE-sensor layout. A distance dij can be assigned to each AE-
sensor pair (i,j) mounted to the test object. A parameter dmax is defined:
𝑑𝑚𝑚𝑚 = max(𝑑𝑖𝑖 )
In case of large objects following situations may occur:
• The maximum distance dij between a pair of sensors is larger than the distance dmax-att. The
distance dmax-att is the distance an elastic wave can propagate before it is attenuated below
the detection threshold. In such a case following relation should be used instead:
𝑑𝑚𝑚𝑚 = 𝑑𝑚𝑚𝑚−𝑎𝑎𝑎 .
• One may want to exclude hits from far away AE-sensors from contributing to an event data
set. A maximum neighborhood distance, dmax-neihgbor can be defined by an operator which
discriminates hits of AE-sensors in close vicinity from hits detected by far away AE-sensors.
In such a case following relation should be used instead:
𝑑𝑚𝑚𝑚 = 𝑑𝑚𝑚𝑚−𝑛𝑛𝑛𝑛ℎ𝑏𝑏𝑏ℎ𝑜𝑜𝑜
The time window of an event data set must be at least of the length it takes an elastic wave to
propagate the maximum distance, dmax. When c is the speed of sound of the elastic wave, the
result is:
𝑑𝑚𝑚𝑚
DT1X-Max = 1.5 ×
𝑐
Please note that for a safety margin a factor 1.5 has been accounted for.
8.2.3 Some practical remarks about FHCDT, DT1X-Max and DTNX-Max
In most applications it is sufficient if event data set building is based on FHCDT condition only
(see section 8.2.1). This requires disabling conditions for closing an active event data set,
namely DT1X-Max and DTNX-Max condition.
In order to disable event data set closing condition based on DT1X-Max and DTNX-Max it is
recommended to set both parameters to the same value as FHCDT parameter.
04-2017 file: amsy-6_opman.docm 59 of 149
AMSY-6 Operation Manual
Then only two event data set closing conditions remain:
• An event data set is closed if a first hit is detected
• An event data set is closed if a second hit is detected in a channel that already contributed
a hit to an event data set. This event data set closing condition can be disabled. Checking
the “Allow multiple hits per channel” checkbox of the Event builder tab (see figure 19)
disables this condition.
8.2.4 Channel functions
Channel functions govern how hits influence identification of first hits. Four channel functions
are defined:
• Normal: Only a hit of a channel with function “normal” can be a first hit. Hits of these
channels will contribute to an event data set if it is active.
• Guard: The task of channels with function “guard” is to prevent that a subsequent hit of a
channel with function “normal” becomes a first hit. Additionally hits of guard channels do not
contribute to event data sets.
• Combined: hits in channels defined as “combined” will act as “guard” unless an event data
set is active. In such a case they will act as “normal”.
• Unused: hits of channels defined as “unused” will neither contribute to event data sets nor
to their discrimination.
8.3 Location Processor
The determination of the AE-source location is an essential element of AE testing. It means that
an elastic wave that was emitted by a source is picked up by more than one AE-sensor in a
specific arrival time pattern. This arrival time pattern corresponds to the location of the AE-
source with respect to the position of AE-sensors.
AE-source location can only be done if the burst of an AE-source is detected by more than one
AE-channel. If the AE-source is detected by more than one (in 1D-case) / two (in 2D-case) /
three (in 3D case) channel(s) a location can be calculated based on the arrival time differences
of the individual hits grouped into an event data set. This assumes that hits from an AE-source
can be grouped into an event data set. Hence, the location processor consists of Event Builder
and the location algorithms.
The location processor calculates the location of the source, and adds results, such as X, Y,
LUCY (location uncertainty), time-differences, number of hits of the event, and more, to the
event's data for further processing by subsequent processors or Visuals. Behind a location
processor, AE parameters, such as amplitude, counts, etc., are taken from the first-hit of the
event. The calculated kind of location results depends on the kind of location algorithm and can
be x-, x-y-, x-y-z-coordinates or latitude and longitude, for example. The set-up for the location
processor can be made according to the requirements of the application.
Channel group
There may be one or more channel groups inside a location processor. With multiple channel
groups more complex structures can be covered. An AE-channel can belong to more than one
channel group. A location algorithm has to be assigned to each channel group. However each
channel group can have a different location algorithm.
04-2017 file: amsy-6_opman.docm 60 of 149
AMSY-6 Operation Manual
If sensors are located around a cylindrical vessel, the cylindrical part and the end caps can be
combined in one location set by using multiple groups.
Location and Location Set
To calculate the location of a source from measured data, an algorithm can be assigned to each
channel group individually. The kind of algorithm is based on a structure's geometry and how
sensors are arranged on the structure. Location algorithms are options in the software and only
the purchased algorithms can be used. The algorithms usually place some restrictions on
number and position of sensors. For instance the algorithm “Solid 3D” requires at least 4
sensors which must not be positioned on one geometric plane.
Sensor and source locations are relative to a co-ordinate system defined by the user. If the
sensors are not exactly at the position as entered in the software, this will influence the location
accuracy.
Location errors
Location accuracy can be adversely influenced by
• A different wave mode than the assumed one determines the arrival time.
• A wave takes a different propagation path than assumed by the algorithm
• Burst of two or more sources overlap at the sensor
• Sources emit bursts in such a quick succession, that there is not enough time for the burst
in the structure to decay, therefore they do not represent a “new” event.
8.4 Cluster Processor
While data passes through a cluster processor, density levels are added and provide additional
statistics about these regions. In the past, clustering has been performed on location results
(indicating the location density). In VisualAE the process has been generalized and clustering
can be performed on any number and kind of results, such as location results, AE parameters,
time, external parameters, and user-defined results.
The user specifies the results to be used for clustering (any number), size, shape
(circle/rectangle) and minimum number of elements that shall establish a valid cluster. Graphs
linked to the cluster processor and showing the cluster results will display color coded clusters
along with a cluster-legend explaining the color's meaning.
8.5 Filter Processor
A filter processor rejects AE-data sets based on user specified criteria. The filter processor
considers AE-data and external parameters, if it is linked directly to the data file. Behind a
location processor, it also considers location results. Behind a user-processor, it also considers
the user-defined results. If the filter processor is placed behind a location set, it considers only
hit-data of the first-hit per event.
8.6 User Processor
User processors can extend the range of results by performing mathematical operations on all
kind of incoming data. The user can choose from a list of predefined mathematical operations,
supply one or more parameters or constants (depending on the operation) and give the new
04-2017 file: amsy-6_opman.docm 61 of 149
AMSY-6 Operation Manual
parameter both, name and units. User-defined results are available to any process and visual
behind the user processor. For example to produce a plot "Cumulative Hits vs. Load", one can
define a user-processor which gives the sum of hits (the value of "Hits" is always one for a hit)
give it the name CumHITS, and then create a X/Y-history showing CumHits at the vertical axis
and the parametric input for the load at the horizontal axis. In addition, combination of AE-
parameters can easily be defined with user-processors, e.g. Risetime/Amplitude or
Counts/Duration.
8.7 Polygon Processor
This processor is a kind of graphic filter: it allows the user to define arbitrary polygons on any
kind of diagram. Each hit data set will be either inside or outside the defined area and can be
filtered accordingly. Example: only data inside the polygon may pass for further analysis/display.
8.8 Grading Processor
It provides formulae for Historic Index and Severity Index published by Professor Tim Fowler.
These results can then be displayed graphically and also the maximum numerical values per
channel can be obtained.
8.9 ECP Embedded Code Processor
It allows the user to write his own code to be executed inside VisualAE online as well as offline.
With this advanced tool one can take any available result(s) and process them according to the
specific needs. This is very powerful to support routine testing according to a well-defined
procedure.
8.10 Alarm Processor
Within the alarm processor the user can define a warning and an alarm level for any result. As
soon as this level is reached or exceeded the software fires a signal to the Alarm Manager
which in turn alerts the user: either by sound, blinking LED, sending a network message or even
an email. Perfect to support monitoring of safety related tests where various criteria may trigger
to halt or even abort the test.
8.11 Visuals in VisualAE
For data presentation, VisualAE offers so-called AE-Visuals, which can be diagrams (AE and
TR) and listings. Any number of visuals can be placed at any point in the Data Processing
Structure. The Visual can display any data that is available on its branch.
Diagrams
Several different types of diagrams are available: 2D-, 3D-graphs, TR-diagrams. TR-diagrams
show waveforms (transient data) in time and/or frequency domain. Many properties of those
graphs can be adjusted by the operator: the results (attributes) to be shown (e.g. Amplitude vs.
time, or Duration vs. Energy...), left + right axis legend, caption (top) and comment text (bottom).
Legends can be edited or made invisible and/or not printable. Diagrams can show distributions,
correlations (point plots), histories, etc., depending on the selected kind of results. Each
diagram can show several planes. Data represented on a plane can be filtered, the color and
shape of symbols can be selected and more.
04-2017 file: amsy-6_opman.docm 62 of 149
AMSY-6 Operation Manual
Background image
A background image (i.e. an image of the test object) can be used in diagrams onto which all
graphs are drawn. Such a background image can be used in location plots to show the actual
test object geometry.
Working through the “introductory exercise” in the online-help of VisualAE will bring you along
the most important features of diagrams.
Listing
A listing presents data in a table format. The attributes which are listed and their ordering can be
user selected.
Still Image
Still images can be inserted and displayed on different pages of the VisualAE setup. This kind of
visual can be used to place a company logo on an analysis page.
04-2017 file: amsy-6_opman.docm 63 of 149
AMSY-6 Operation Manual
9 How to setup visuals in VisualAE
This section provides a Step-by-Step Guide to diagrams frequently used in AE. It describes the
diagram itself, where it can be found in the VisualAE Library, how to create it from scratch,
options which can be modified, and last but not least: how, when and where it is mainly used.
Finally an example is presented and explained.
9.1 Formatting Conventions
These special text formats are used (see also
figure):
[[Buttons]]: Text which is bold and offset within
double square brackets indicates that the user
should select the specified button within the current
dialog window.
//Tabs\\: Text which is bold and offset with double
forward/backward slashes indicates that the user
should select the tab at the top of the current dialog
window.
'Menu/Item': Items out of menus are sometimes
referred to in this shorthand.
9.2 Diagram Example 1: Superposition of AE and Load
This diagram can be used in cases where
parametric data has been acquired. The
following procedures assume that data has
been collected on the first parametric
(parametric zero, PA0).
VisualAE Library Reference
A graph similar to this example can be found in the VisualAE Library.
Section 2D-Diagrams
Directory Hits vs
04-2017 file: amsy-6_opman.docm 64 of 149
AMSY-6 Operation Manual
Diagram Hits vs Time, Chan 1-6, Load vs. Time
Creating parametric conversion
1) It is recommended (but not necessary) that you start with a new page. To do this, under
the page menu select the item "New Page."
Parametric Conversion - to obtain results in physical units instead of millivolts
2) Under the "Edit" menu select the
"Parametric Conversion" Item
3) In the Parametric Channel Dialog, select
parametric input 0 (PA0) and click on [[edit]]
4) In the Parametric Channel Settings
(Channel 0) Dialog, Enter the Offset and
factor, plus descriptors that correspond to
the signal scaling.
5) For instance, if a +/- 10 Volt signal corresponds to a -10 to 10 kN load with positive
voltage corresponding to tension, the following text should be entered:
Name Load
Unit [kN] (or [N])
Offset 0 mV
Factor 0.001 kN/mV (or 1 N/mV)
Long Name Tensile Load
Description Load signal from a uniaxial testing machine
6) Click on [[OK]] in both the Parametric Channel Settings and the Parametric Conversion
Dialog Boxes.
Creating diagram from scratch
7) Under the "Insert" menu, select the "AE-Diagram" Item
8) A data server dialog box will appear if one or more processors (location, filter, cluster,
etc.) have been defined within this .VAE file. If this dialog appears, select the root data
server (which will be the same as the .pri file name). Then select [[Next]]. Note: the
position of a diagram within the data processing structure can always be changed later on
by drag&drop under 'Edit/Structure').
st
9) 1 Diagram Wizard Dialog Box (Number of Axis)
Click [[Next]] (the default is wanted here: 2 axis and Hits vs. Time)
nd
10) 2 Diagram Wizard Dialog Box (Diagram type)
Click [[Next]] (the default is wanted here: Bars differential)
04-2017 file: amsy-6_opman.docm 65 of 149
AMSY-6 Operation Manual
rd
11) 3 Diagram Wizard Dialog Box (Target page)
Choose a page from the page list and click on [[Finish]] (the default page is the current
page and is probably the best choice here)
Properties Menu
12) Call up the diagram's property dialog
Right click on the diagram to get the pop-up menu, choose the properties item
13) Set up a right axis
14) In the attribute menu of the diagram dialog, check the box by the right vertical axis
attribute
15) By the right attribute arrow, change the right
vertical axis attribute to a parametric Select
the right arrow to get the attribute menu: a
dialog will appear with a note describing
which steps must be used to get a right
axis. These steps are repeated and fulfilled
by following the next steps.
Under the Parametric Results, choose the
PA0U item (Note: if no parametric scaling
was implemented in step 1, choose the PA0
item and this result will appear in millivolts).
16) Add a right axis distribution plane to the
diagram
Go to the distribution menu (select the
//distribution\\ tab at the top of the dialog)
Click on the right vertical axis (PA0U vs.
Time[s]) inside the center of the box.
Click on the [[Add]] button immediately
below the dialog's center region
17) In the Plane Settings Dialog under //plane style\\ tab: change the plane type to line history
and change the plane's color to a color other than green.
18) Change the plane's legend
Change the menu by selecting the //plane legend\\ tab at the top of the plane settings
dialog
Replace the default macro (=[filter]) with a description of the parametric as in step
Creating parametric conversion either appropriate text (Load) or better yet the following
macro can be used: =[YR-ATTRUnitLong]
Select [[OK]] at the bottom of the plane settings dialog.
04-2017 file: amsy-6_opman.docm 66 of 149
AMSY-6 Operation Manual
19) Adjust plane legend for the left axis
Select the left axis plane by double clicking
on the distribution icon under the left vertical
axis.
Select the legend tab at the top of the menu
and replace the default macro (=[filter]) with
"AE activity (=[Y-AttrUnitLong]), all
channels"
Select Okay at the bottom of the plane
settings dialog.
20) Adjust Legend, Legend Tabs
Select the Legend tab at the top of the Diagram Properties dialog
Check the visible box in the right header
Add planes representing separate channels
21) Go to the distribution tab
22) Similar to step 10) go the distribution tab, select the left vertical axis, click on add
23) Similar to step 11), change to the plane style to stairs differential and choose a new color
Under the plane filter menu, click on the [[and]] button. On the setup filter menu, click on
24) the arrow and choose the channel item under the hit results menu. The condition is now
Chan = 1, which is okay so click on [[OK]].
25) Similar to step 12), change the planes legend to "AE activity, Channel 1"
26) More planes for other channels can be created by repeating these steps.
27 Select [[OK]] at the bottom of the diagram properties dialog.
How, When and Where is this Diagram Mainly Used?
This graph is most effective for time based correlation between AE and externally measured
parameters. AE activity is measured against an AE instruments global clock to very high
precision. This same clock can measure both external parameters which stimulated the AE
activity (such as a load program) and physical parameters which have occurred as a result of
this stimulation simultaneously with the AE activity (for instance, strain). Establishing a time-
based correlation between the AE activity and either applied stimulus or other resulting effect
can provide very powerful insight into many processes.
There are numerous uses for time based correlation that can be listed. They can be used to find
exact time determinations of distinct events, for determining when the AE activity shows a
distinct initiation point (Kaiser Effect, Temperature Transition, etc.), for determining when
multiple AE sources occur and where a transition between AE sources has occurred, for
determining when a parametric transition has occurred (for instance a knee point) and how the
AE behavior can be correlated to this, and for establishing the basis of test evaluation criteria. In
many cases, the information obtained from these diagrams are exact quantities.
AE excels at exact time determinations. Since the AMSY4 is automatically tracking the exact
time of AE, when a singular distinct event occurs, it is easy to determine the value of any load,
strain, etc. at that point in time. Some distinct events which occur are:
04-2017 file: amsy-6_opman.docm 67 of 149
AMSY-6 Operation Manual
• Failure of brittle coatings
• Rupture of individual parts among populations: each fiber break among many fibers
• Failure of embedded parts: inclusion failure
• Failure of one part among many: first ply failure in composite laminates
AE experience of material behavior can be determined and put to use to find out if and when
distinct initiation points occur. The procedure is similar to that of exact time determinations -
note when the AE behavior has occurred and finds the load level of interest. Some important
initiation points that are:
• Determination of previously applied load. When a material's AE behavior is governed by the
Kaiser Effect, the load at which it will begin to reemit will indicate the previously applied
maximum load.
• Determination of the onset of specific phenomenon. Many failure mechanisms require
activation which is not immediate. Depending on the material and other factors (such as
how it was made, load history) , these can include micro cracking, void formation, void
coalescence, interface debonding, corrosion and corrosion assisted cracking.
When more than one type of AE activity is being generated, it is likely that under different
loading and/or environmental conditions one will be dominant over the other. When these
conditions change, a transition between AE sources can be revealed with AE. Analysis of
transitions from AE is more subjective than distinct variations and can be followed by abrupt
changes of specific measures of activity (such as hits, counts, energy). Various transitions are
of importance, including:
• Progression of damage from less severe to more severe: matrix cracking to debonding
and/or fiber breakage in fiber reinforced composites.
• Damage which initiates from pre-existing damage: for example void coalescence to macro
cracking in some metals.
Acoustic Emission can often better highlight material changes which are hard to measure
precisely when only the stimuli response data is compared. When applying constant or
monotonic stimuli, the measurable response may only show a gradual parametric transition. If
AE is being generated as a consequence of the same cause and effect, however, the time of
occurrence of the AE will be tracked exactly. Some examples:
• Load-displacement transitions (Stress-strain knees). Yielding in many metals and matrix
cracking in fiber reinforced composites cause gradual transitions in stress-strain behavior.
Picking a transition point from only the stress-strain curve can be subjective and dependent
on where tangents are drawn to such a curve.
• Temperature stimulated tests to determine temperature softening can be subjected to more
than one independent temperature related effect - the actual transition and gradual
temperature changes. For AE there is no ambiguity as to when it occurs.
When AE tests are used to determine structures integrity, there is a need to have means to
reach decisive recommendations based on the AE results. Preliminary tests on the structure,
and possibly also on the smaller scale tests, can be used to develop both load programs and
test evaluation criteria. In practical AE structural testing there are several time based criteria
now in use. These include:
• Test reload criteria (Felicity Ratios). Determining when AE occurs in a reload cycle and
calculating the Felicity ratio against the previous applied load.
04-2017 file: amsy-6_opman.docm 68 of 149
AMSY-6 Operation Manual
• Activity within hold periods. In structures with active defects, AE continues at constant
applied load for much longer periods of time than for structures without. Criteria based on
activity within 2 minutes of load are found in many recommended practices for integrity
testing.
• Total activity. There are many guidelines on how much activity is expected from good and
bad structures based on previous test experience.
Superposition of load and AE is mainly used in: material testing in laboratories and in structural
testing under controlled stimuli. It has limited or no use when there is not a characteristic
physical parameter which varies with time, such as leak detection in above ground storage
tanks. In material testing in laboratories, the goal is often to determine material characteristics
about failure at economical scales for testing which can later be extrapolated and application to
larger scales where testing is much more expensive. In structural testing, previously determined
characteristics are often applied under load programs - the presence or absence of specific
behavior is then used as a diagnostic method. Some of the values for test criteria can only be
determined from full scale testing; laboratory scale testing is often insufficient to be used to
determine criteria.
Actual Example
In advanced materials, more than one path to failure can occur and it can be very difficult and
time consuming to analyze and predict how these materials behave. Fiber reinforced composite
materials are the most prevalent example of materials that readily exhibit multiplicity of failure
modes. The diagram which accompanies this example is from a composite material taken to
failure.
When loaded to failure, many composite lay-ups will produce matrix cracking first. Matrix
cracking is the cause of the knees in stress-strain curves. As matrix cracking represents
permanent damage, it is necessary to recommend that composite materials be used only below
this knee point. The change in deflection of the stress-strain curve can be hard to detect and it
may be hard determine when it occurred. Even when the transition is easy to determine, it is
often hard or impossible to determine the extent of the matrix cracking: how soon matrix
cracking occurs before the knee point and how long matrix cracking continues after the knee
point, if at all. One basic method for determining the knee point from the stress-strain curve is to
draw a tangent to the load curve at the initial part of the curve and another at the high end of the
curve and to see where the tangents intersect.
The data shown comes from a lay-up with 0, 45 and 90 degree plies. In load portion of the
diagram, several problems can be seen: there is a "toe" at the beginning of the load curve, the
change in slope is quite small and the stress-strain curve gives almost no indication how long
the transition occurs. A "toe" in a stress-strain is a common feature; it occurs at low load levels
and is caused by incomplete load transfer. This problem corrects itself at higher load levels.
Tangents drawn to the lower part and higher part of the curve are highly variable; you may find it
easy to justify any point between 150 seconds (1100 N) and 250 seconds (2200 N) as the
transition point of this curve.
The AE is readily detectable and two phases can be seen in the diagram. In the first, the AE
increases to a steady rate which holds about constant between 150 and 250 seconds. After 250
seconds the AE increases dramatically until the first load drop. In initial area and around the
region where the slope changes, matrix cracking can be verified under the microscope. In the
second phase which concludes with the failure of several plies, the ply failure can be visibly
observed by the unaided eye. In fact the AE confirms that matrix cracking occurs at a range of
loads, predominantly between 150 and 250 seconds. The matrix cracking is not completely
restricted to this period while the development of ply failure occurring at 350 seconds is
accelerating from at least 250 seconds into the test.
04-2017 file: amsy-6_opman.docm 69 of 149
AMSY-6 Operation Manual
9.3 Diagram Example 2: Superposition of Transient and
Background Activity
This diagram displays peak amplitude of hits
on the left vertical axis as correlation plot
(green dots) and RMS on right vertical axis
as distribution plot (red line).
VisualAE Library Reference
A graph similar to this example can be found in the VisualAE Library.
Section 2D-Diagrams
Directory Amp vs
Diagram Map (dots), RMS vs Time, Chan 1-6
Creating diagram from scratch
1) Under the "Insert" menu, select the "AE-Diagram" Item
2) A data server dialog box will appear. Select the root data server (which will be the same
as the primary data file name). Then select [[Next]]. The position of a diagram within the
structure tree can always be changed later by drag&drop.
3) Diagram Wizard Dialog Box (Number of Axis)
The defaults '2 axis' and 'time [s]' as horizontal axis are fine. In place of Hits attribute on
the vertical axis, click the arrow and select the item A (Amplitude in dB) under Hit results.
Click on [[Next]]
4) Diagram Wizard Dialog Box (Diagram type)
Choose the correlation type and click on [[Next]]
5) Diagram Wizard Dialog Box (Target page)
Choose a page from the page list and click on [[Finish]] (the default is the current page).
Properties Menu
6) Call up the diagram's property dialog
Right click on the diagram to get the pop-up menu
Choose the properties item
7) Set up a right axis menu of the diagram dialog, check the box by the right vertical axis
attribute
8) By the right attribute arrow, change the right vertical axis attribute to an RMSS (under
other results RMS background noise from status set) or RMS-background (under Hit
results called RMS background noise). Note: RMS-status and RMS background are
stored differently: RMS background is stored with each hit, while RMS status are stored
04-2017 file: amsy-6_opman.docm 70 of 149
AMSY-6 Operation Manual
in the AMSY4 status sets, which is stored independently at constant intervals.
Background noise is the better choice when high time resolution is required provided
there is enough hits (for instance during process monitoring), RMS-status is better if
steady RMS is required and when there may be times during recording where little or no
AE is recorded (like during a background noise check).
9) On the diagram, add a distribution plane to the right axis
Go to the //distribution\\ menu (tab at top of diagram property dialog)
Click on the right vertical axis inside the center of the box
Click on the [[Add]] button immediately below the dialog's center region
10) In the Plane Settings Dialog under plane style tab: change the plane type to line history
and change the plane's color to a color other than green.
11) Change the plane's legend
Change the menu by selecting the //plane
legend\\ tab at the top of the plane settings
dialog
Replace of the default macro (=[filter]) with
"Continuous AE, =[YR-AttrLongUnit]". Note:
further information about the RMSS and
background RMS signals can be found in the
help text and should be read to clarify the
different meaning of the two parameters.
Select [[OK]] at the bottom of the plane
settings dialog.
12) Adjust plane legend for the left axis
Choose the //Correlation\\ Tab
Select the left axis plane by double clicking on the distribution icon under the left vertical
axis
Select the legend tab at the top of the menu and replace the default macro (=[filter]) with
"Burst AE"
Select [[OK]] at the bottom of the plane settings dialog.
13) Adjust Legend, Legend Tabs
Select the //Legend\\ tab at the top of the Diagram Properties dialog
Check the visible box in the right header
14) Fix the vertical scales
Choose the //Attribute\\ tab
Choose to use fixed minimums and maximums on both vertical scales by checking the
boxes in front of each number. Then select values such as:
• Amplitude Minimum 0 dB
• Amplitude Maximum 80 dB
• RMS minimum 1 microvolt
• RMS maximum 10000 microvolts
By the right vertical axis, change the drop down menu from linear scale to logarithmic
scale.
04-2017 file: amsy-6_opman.docm 71 of 149
AMSY-6 Operation Manual
Matching the minimum and maximum of the left and right axis (0 dB=1 microvolt, 80 dB =10000
microvolts) has two advantages: (1) it displaces the data from the two axis, the amplitude data
(dots) will normally be visible well above the RMS background data (lines), (2) it will be a
consistent representation that helps develop experience to (eventually) recognize similar
superposition of burst/continuous overlays.
15) Select [[OK]] at the bottom of the diagram properties dialog.
How, When and Where is this Diagram Mainly Used?
This graph shows concisely the extent of both continuous AE (RMS is used as a measure of
continuous AE) against the burst AE. Although this is a fairly basic tool, the AMSY4 is currently
almost the only AE system which can display this information in one simple graph (the AMS3
can also display this diagram).
The superposition of AE transients (amplitude dots) with background AE (RMS) can be used for
determining acquisition settings for hit acquisition from a particular background environment,
detecting sudden background fluctuations which are essentially noise and correlating and/or
separating multiple sources when these sources are composed of different levels of burst and
continuous AE. The results of this analysis can be somewhat qualitative and may require
subjective interpretation.
After a background noise check, this graph can help in determining acquisition settings. This is
particularly useful if a floating threshold is to be specified (in threshold-to-RMS). For instance:
• Setting the fixed threshold in a noisy environment. Once a background noise check has
been performed, the fixed threshold should be at least 15 dB above the steady RMS level
to prevent the background itself from causing a steady rate of threshold triggers. A
minimum of 20 dBAE is recommended.
• Knowing when to use a floating threshold. Before beginning a test, it is recommended to
perform a background noise check. A background noise check monitors activity coming
from the structure with all sensors in place but before loading is applied. It is recommended
to observe both background noise (RMSS) and watch for hit activity. If significant short term
fluctuations in either the hit activity or RMSS occur (perhaps because of plant operations
unrelated to the test), it may be wise to incorporate a floating threshold. This is especially
th
true if the RMSS level climbs to greater than 1/5 of the fixed threshold during any
fluctuation. One will probably see hit activity from the increased background noise alone in
this case. A threshold-to-background setting of 6 to 10 can be tried in such cases.
Large structural and sometimes even small scale laboratory tests may be subject to
environmental noise outside the direct and immediate control of the test operators. Detecting
sudden background fluctuations of many noise sources can be seen when the RMS level
(background noise) increases. Once the noise is identified, the test operators should find means
to isolate or eliminate the noise before the test continues. Noise sources which result in
increases in the background noise level include:
• Flow noise, including leaks and open valves, especially when opened only slightly
• Contact rubbing noise, including surfaces moving over one another. Surface impact noise
may not show up on RMS levels.
• Vibration noise, such as fans or machinery being turned on.
The contrast of burst and continuous AE may also be a means of correlating and/or separating
multiple sources of AE when at least one is predominantly burst and another is predominantly
continuous. Examples include:
04-2017 file: amsy-6_opman.docm 72 of 149
AMSY-6 Operation Manual
• Weld crack monitoring, which generates continuous weld noise and burst crack noise.
• Rotating machinery, instruments, etc., which produce continuous AE vibration and burst AE
when imperfections and defects periodically interfere with the rotation.
• Cavitation within fluid flow where the cavitation bursts are among a continuous fluid flow.
The transient background noise may be used in feasibility studies, structural testing and process
monitoring applications. In a feasibility test, this graph should help to determine the noise floor
for testing. In structural testing this diagram finds use in the background noise check, when the
noise environment is being tested. It also finds use as an auxiliary diagram, alerting the operator
of unwanted noise. For process monitoring applications, such as welding, the graph can
explicitly identify when certain processes are active while simultaneously alerting one to any
particular defects, such as weld cracking.
Actual Example
Welding, like other processes, creates distinct regions of high RMS. In particular, when welding
the RMS level rises to a fairly constant value during welding and falls back when welding is
complete. Weld cracking, on the other hand, generates readily detectable AE hits that is easily
discerned from the RMS as dots in this representation. Cracking may occur during welding,
immediately after welding or long periods after welding depending on the mechanism which
generates it.
In this case an intentionally bad weld is made so that it will crack. The actual welding is
performed in about one minute long, which can be seen in the increase in RMS from 0-60
seconds. During welding, various sources, including phase transformation, initial contact
between the welding device and the material and surface oxidation occur. After welding, as
stress relief and diffusion occurs between base and weld materials, cracking can be seen
starting immediately with welding and continuing for at least one half hour of welding. For some
weld types cracking may be detected in welds days after the weld is made. The time delay with
the weld is also an indication of the cause of the AE. Early cracking can indicate stress release
due to cool down, for instance, while cracking long after welding indicates slower processes,
such as Hydrogen induced cracking from Hydrogen diffusion.
9.4 Diagram Example 3: Planar Location Diagrams with Clustering
This diagram can be made for tests where
an array of sensors is used for location. A 4
channel array is used in this example.
VisualAE Library Reference
A graph similar to this example can be found in the VisualAE Library. This diagram requires a
location processor
04-2017 file: amsy-6_opman.docm 73 of 149
AMSY-6 Operation Manual
Section 2D-Diagrams
Directory Location
Diagram Planar Y- vs. X-Location
For this example, values from 4 sensors of a larger interlocking array are used (see diagram
above)
Define Location Processor
1) Insert Location Processor: click on Location Processor item under the insert menu
2) Specify the Channels in the Event
Builder.
Under the Location Settings dialog,
Event Builder tab, initially only one
line is shown
Specify the channels in the sensor
array: under "Channels" on line 1,
input the first channel and hit enter.
The default function "Normal" is
specified, this function only needs to
be changed if you want to use a
sensor as a guard sensor or to
specify not to use this sensor in the
array.
3) Repeat the previous step for lines 2, 3 and 4 with the second, third and fourth channels
respectively. For this example, channels 8, 10 and 11 were entered
4) Enter "General location settings"
• Location Units: in.
• Velocity: 180 in/sec
• Max. Neighbourhood Distance: 180
5) Enter " Event assembling time criteria "
Specify the event assembly criteria and general location settings.
• FHCT 1.1 ms
• DT1X-Max 1.1 ms
• DTNX: 1.1 ms
04-2017 file: amsy-6_opman.docm 74 of 149
AMSY-6 Operation Manual
6) Specify the Channel Group
Select the //Channel Positions\\
Tab
Add a Channel Group by clicking
on the [[Add]] button.
Change the group type by
selecting the Planar type from the
pull down menu next to Type
7) Specify the Channel Positions
Specify the channels in the sensor
array: under "Channels" on line 1,
input the first channel and hit
enter. The position of the sensor
will default to 0 and 0 inches.
8) Repeat the previous step for each of the other sensors.
9) Examine Neighborhood Table, Distances
The [[Neighborhood Table]] and [[Distances]] buttons call
up information dialogs about the sensor array. These
dialogs contain information that help in evaluating the
location setup. This information can also help to determine
some of the previous location settings (step 1.3 and 1.4).
In this case, the maximum arrival time delay across the
array for the given velocity (channel 7 to 11) is just below
1.1 ms which corresponds to a maximum distance of 180
in.
10) Verify
The [[Verify]] button will automatically check for location settings that are questionable.
Any combinations of settings that are found questionable will be reported with a short
explanation. This can be helpful in determining if some of the location settings should be
modified.
11) Add a comment to the processor.
An advantage of giving a processor or diagram a comment is that in the structure tree the
processor/diagram will have a more descriptive identity.
For this example, a comment "Planar Location Processor for Channels 7, 8, 11 and 12"
was used.
Creating diagram from scratch
12) Under the "Insert" menu, select the "AE-Diagram" Item
13) A data server dialog box will appear. Select the location processor that was created in
step 1. Then select [[Next]].
14) Diagram Wizard Dialog Box (Number of Axis)
Default '2 axis' is fine, but the two attributes should be changed.
In place of Hits attribute on the vertical axis, click the arrow and select the item Y under
location results
04-2017 file: amsy-6_opman.docm 75 of 149
AMSY-6 Operation Manual
In place of Time[s] attribute on the horizontal axis, select the item X under location results
Click on [[Next]]
15) Diagram Wizard Dialog Box (Diagram type)
Choose the correlation type and click on [[Next]]
16) Diagram Wizard Dialog Box (Target page)
Choose a page from the page list and click on [[Finish]] (the default page).
Properties Menu
17) Call up the diagram's property dialog
Right click on the diagram to get the pop-up menu
Choose the properties item
18) Adjust the plane symbol and legend for the left axis.
Select the left axis plane by double clicking on the distribution icon under the left vertical
axis
Select a light symbol (e.g. light green), or if there are a great deal of locatable events
choose Correlation (dots)
Select [[OK]] at the bottom of the plane settings dialog.
19) Select [[OK]] at the bottom of the diagram properties dialog.
Define Cluster Processor
20) Insert Cluster Processor:
Click on the Cluster item under the insert
menu.
When the Find Data Server Dialog Menu
appears, choose the location processor
and click on [[OK]].
21) Define Cluster Processor
The Cluster Setup Dialog will follow the
Find Data Sever Dialog once OK has
been selected.
22) Cluster Shape: Circular
• Cluster Size: 10 inches (enter in either field when a circular shape is chosen)
• Fix limit color 1: 5
• Fix limit color 6: 10
Select: all of the check boxes in the color coding lineup
04-2017 file: amsy-6_opman.docm 76 of 149
AMSY-6 Operation Manual
23) Add a comment to the cluster processor.
An advantage of giving a processor or
diagram a comment is that in the
structure tree the processor/diagram will
have a more descriptive identity (see
step 4.4).
24) Place Location Diagram under Location Processor
Click on the edit structure icon on the screen toolbar.
Drag the x-y location diagram and drop it on the cluster processor line.
The x-y diagram should now be placed under the cluster processor. Click [[OK]] to exit.
How, When and Where is this Diagram Mainly Used?
The information on where AE sources are occurring is extremely valuable. Accurate AE
location, however, is not always easy, in fact in some cases it can be quite difficult and requires
much experience. Fortunately, the AMSY4 has many tools to help with location accuracy and
improve it, such as a location analyzer and Location Uncertainty (LUCY) parameter. Only the
basics of location are discussed here, however.
Some of the most common uses of location are to identify AE that concentrates around specific
points (clusters), as a starting point for follow-up searches, for general location to identify weak
components, as a basis of a test criterion during test evaluation, and as a means of spatial
discrimination in noise rejection.
When activity begins to concentrate around specific points (clusters) it is also likely that a stress
concentration point (such as a crack) is the source of the activity. When this is combined with a
test program, this may form the basis of test criteria. With an experience base established for a
material or structure (for instance, clustering in tank bottom testing), critical location densities
may be defined. It may be noted here, however, that unlike the time based AE examples (like
the Felicity ratio) there are no standards that recommend or suggest critical densities at this
time.
Locations results may also be used as positions to begin follow-up searches (such as UT) or
repair work. When an AE structural test evaluation finds active sources, recommendations for
follow-up inspections are often made. Accurate source location analysis can help to focus this
inspection and make it as time efficient as possible.
Location results may also be used to identify weak components in a structure. In structures with
many components such as welds, pipes, valves, intakes, man ways or support structures,
locations near any of these may be enough by themselves to warrant follow-up inspection.
Location is often used as a means of spatial discrimination where AE activity and noise sources
occur in different structural regions. If AE is locating near a source of noise, this knowledge can
be used to act against the noise source, such as trying to dampen the noise or deploying a
guard sensor in the vicinity of the noise source.
Some places where these diagrams are used include testing of in-service structures (pressure
vessels, above ground storage tanks), design analysis and design qualification testing.
04-2017 file: amsy-6_opman.docm 77 of 149
AMSY-6 Operation Manual
Actual Example
Location requires the grouping of multiple hits into events and calculating the position of the
events. In the example diagram, part of a cylinder is shown in a the planar projection.
Locateable events occur in a limited region of the vessel. The concentration of events is
emphasized by the clusters. On this structure, there are particular internal components welded
to the structure at these points. At the time of this reporting it is not known whether these
components are cracking or they have broken free and are rubbing on the structure. An internal
inspection is planned.
9.5 Diagram Example 4: Correlation Diagrams
In a correlation diagram every data point is
represented by a dot.
VisualAE Library Reference
A graph similar to this example can be found in the VisualAE Library. This diagram requires a
location processor
Section 2D-Diagrams
Directory Other Correl
Diagram Counts vs. Duration
Creating Diagram from Scratch
1) Under the "Insert" menu, select the "AE-Diagram" Item
2) A data server dialog box will appear. Select the root data server (which will be the same
as the primary data file name). Then select [[Next]]. The position of a diagram within the
structure tree can always be changed later by drag&drop.
3) Diagram Wizard Dialog Box (Number of Axis)
The default '2 axis' is fine. In place of Hits attribute on the vertical axis, click the arrow and
select the item CNTS (Counts) under Hit results. In place of Time [s] attribute on the
horizontal axis, click the arrow and select the item D (Duration) under Hit results. Click on
[[Next]].
4) Diagram Wizard Dialog Box (Diagram type)
Choose the correlation type and click on [[Next]]
5) Diagram Wizard Dialog Box (Target page)
Choose a page from the page list and click on [[Finish]] (the default is the current page).
04-2017 file: amsy-6_opman.docm 78 of 149
AMSY-6 Operation Manual
Properties Menu
6) Call up the diagram's property dialog
Right click on the diagram to get the pop-up menu
Choose the properties item
7) Adjust Legends
Select the Legend tab at the top of the Diagram Properties dialog
Deselect the Plane Legend Visible box
8) Select [[OK]] at the bottom of the diagram properties dialog.
How, When and Where is this Diagram Mainly Used?
Plotting AE parameters in this manner may reveal separate groups of data. This can be a hit
and miss approach, however there are some specific correlation plots which have been
identified that often serve in this manner. This diagram can be used as a means to separate
noise for and for establishing dependence of specific AE parameters.
First is finding a means to separate noise from AE sources. These graphs are often used to
determine noise, especially when a resonant sensor is being used. Two examples are in
structural testing where electrical interference or rubbing may occur and in laboratory testing
where grip slippage may result. As electrical noise are signals which are independent of the
sensor, they are typically of very short duration which is not the case of signals which pass
through a resonate sensor. Rubbing and slippage, on the other hand, are often of very long
duration sources that overlap each other but produce signals and are usually always close to
the threshold.
Under certain circumstances one will find establishing dependence between measured AE
parameters to be successful. In certain cases, waveforms will exhibit specific relations. The
most well-known case is when a waveform shows strictly resonance, counts/duration = resonate
frequency. In other cases, one may examine correlation plots simply to find separation of
different classes, whether there is an apparent reason for this separation or not.
Actual Example
Noise is of constant importance in any AE test. It is usually best if you can identify and filter
noise
• at its source (e.g. mechanically dampening it),
• by its frequency (e.g. applying appropriate frequency filters)
• by its amplitude range (e.g. increasing thresholds or using a floating threshold) or
• by its spatial extent (e.g. using guard sensors)
There is sometimes no alternative to sorting and filtering data after it has been recorded.
The diagram in the example, counts versus duration correlation, represents a check on the
resonance dependence of the collected hits. In this diagram, a great deal of the data shows a
linear correlation where counts/duration line falls on the resonance frequency of the sensor.
There is a second group of data, however, which lies much below the resonance correlation
line. This is low amplitude signals which have extended duration because the reoccurring
source continues to excite the threshold. In this case, there is rubbing noise on the structure.
Several correlation graphs (counts-duration, counts-amplitude, duration-amplitude) are being
used as auxiliary graphs for the purpose of identifying noise in structural testing. They help
04-2017 file: amsy-6_opman.docm 79 of 149
AMSY-6 Operation Manual
identify unknown noise sources which may creep into a testing environment after the beginning
of a test.
9.6 Diagram Example 5: cumulative amplitude diagrams
VisualAE Library Reference
A graph similar to this example can be found in the VisualAE Library. This diagram requires a
location processor
Section 2D-Diagrams
Directory Hits vs
Diagram Hits vs Amp
Creating Diagram from Scratch
1) Under the "Insert" menu, select the "AE-Diagram" Item
2) A data server dialog box will appear. Select the root data server (which will be the same
as the primary data file name). Then select [[Next]]. The position of a diagram within the
structure tree can always be changed later by drag&drop.
3) Diagram Wizard Dialog Box (Number of Axis)
The default of 2 axes and a vertical axis of hits are fine. In place of Time[s] attribute on the
horizontal axis, click the arrow and select the item A (Amplitude in dB) under Hit results.
Click on [[Next]].
4) Diagram Wizard Dialog Box (Diagram type)
Choose the correlation type and click on [[Next]]
5) Diagram Wizard Dialog Box (Target page)
Choose a page from the page list and click on [[Finish]] (the default is the current page).
Properties Menu
6) Call up the diagram's property dialog
Right click on the diagram to get the pop-up menu
Choose the properties item
7) Adjust Attributes
By the left vertical axis, change the drop down menu from linear scale to logarithmic
scale.
04-2017 file: amsy-6_opman.docm 80 of 149
AMSY-6 Operation Manual
8) Adjust Legends
Select the Legend tab at the top of the Diagram Properties dialog
Deselect the Plane Legend Visible box
9) Select [[OK]] at the bottom of the diagram properties dialog.
How, When and Where is this Diagram Mainly Used?
When a large number (hundreds or thousands) of AE events are measured, the AE amplitude
statistics often show a distinct logarithmic dependence which correspond to similar relations
seen in earthquakes. When hits measured above an reference amplitude are plotted against
amplitude (the cumulative amplitude distribution) it is often a good fit to the equation:
−b
N A
=
N t A0
where N is the number of hits observed above the amplitude A and Nt is the total hits observed
at the reference amplitude Ao.
The amplitude distribution, in its cumulative form, can be used to find the effect of threshold on
number of hits detected and to identify distinct b-values. The results from this graph are
quantities that apply exactly to the test being analyzed and hopefully are also very close to what
values that can be expected from similar tests.
First is determining the effect of threshold on number of hits detected and the amount of hits
data stored to the primary data file. This can be used to limit file size and data rates. With this
graph one can:
• Determine how many hits would be detected if the threshold is raised
• If the graph shows a straight line behavior, one can extrapolate an estimate of how many
hits would be expected at lower thresholds
Also one can use this graph to help Identify distinct b-values from log-log relationships. Often a
cumulative amplitude data shows a straight line slope called the b-value. The slope b takes
value usually between 0.5 and 3. When this equation fit is sufficiently accurate, the entire
diagram can be determined from the threshold Ao, the total number of hits Nt and the b-value.
There are also studies which empirically correlate b-values with specific damage mechanisms in
specific materials.
This graph can be used in any type of testing, especially in composite testing.
Actual Example
When there is a high hit activity rate during a test, the size of the data file can be excessive.
Also, the frequency hits overlap one another is likely to be much greater than with slower activity
rates. Especially in composite materials large amounts of AE activity can be expected. The
number of hits and the peak rate in hits/second will both be high. How uniformly the total
monitored activity changes with threshold can be determined from a cumulative amplitude plot.
In this example, over 20'000 hits were monitored from a composite loaded until failure with a
monitoring threshold of 50 dB. In the example diagram, it can be seen that if a 55 dB threshold
had been chosen, only 10'000 hits would be expected and at 60 dB only 5'000 hits. On the other
hand, if one extrapolates this graph, one might expect 50'000 hits if the threshold were lowered
to 45 dB and more than 100'000 hits at 40 dB. Since this curve appears uniform, one might
want to use a higher threshold (such as 50 or 55 dB) if one is only interested in statistically
characterizing this material. The higher threshold will limit the chance that hits will be
04-2017 file: amsy-6_opman.docm 81 of 149
AMSY-6 Operation Manual
overlapping at this threshold; this becomes an important factor if a series of tests are planned
where one or more test parameters (strain rate, for instance) are to be changed which could
increase AE activity rates in some tests.
Since the diagram shows more or less a line, a b-value can be calculated from this test. There is
about 100 times more events over amplitudes which are 20 dB smaller. The slope (b-value) is 2
in this case. This implies that the amplitude data is a good fit to equation:
−2
N A
=
N t A0
where N is the number of hits observed above the amplitude A and Nt is the total hits observed
at the reference amplitude Ao. Nt and Ao may be conveniently taken as the total hits (20'000)
and threshold (50 dBAE). The b-value is an empirical quantity that can be found in published
reports and has carried over to AE from earthquake analysis.
9.7 Diagram Example 6: 3D location plots
This is a diagram displaying results of AE-
source location on a spherical surface in 3
dimensions. This diagram can be found in
the tutorial file SPHERE3.pri located at
c:\vallen\gstarted.
The same diagram is in the Library, part of
the 3D Diagrams section, and is called
“Spherical Location”.
This example does not only apply to
displaying AE-sources on a sphere in 3
dimensions but to all other 3 dimensional
diagrams as well.
VisualAE Library Reference
The same graph can be found in the VisualAE Library. This diagram requires a location
processor
Section 3D-Diagrams
Directory Root
Diagram Spherical Location
04-2017 file: amsy-6_opman.docm 82 of 149
AMSY-6 Operation Manual
Define Location Processor
1) Insert Location Processor: click on Location Processor item under the insert menu
2) Specify the Channels in the Event
Builder.
Under the Location Settings dialog,
Event Builder tab, initially only one
line is shown
Specify the channels in the sensor
array: under "Channels" on line 1,
input the first channel and hit enter.
The default function "Normal" is
specified, this function only needs to
be changed if you want to use a
sensor as a guard sensor or to
specify not to use this sensor in the
array.
3) Repeat the previous step for lines 2 to 30. In total 30 channels are required
4) Enter "General location settings"
• Location Units: cm.
• Velocity: 335 cm/sec
• Max. Neighbourhood Distance: 10,000cm. By selecting sucha large maximum
neigborhood distance disabling this condition)
5) Enter " Event assembling time criteria "
Specify the event assembly criteria and general location settings.
• FHCT 10 ms
• DT1X-Max 10 ms
• DTNX: 10 ms
6) Specify the Channel Group
Select the //Channel Positions\\
Tab
Add a Channel Group by clicking
on the [[Add]] button.
Change the group type by
selecting “Spherical” from the pull
down menu next to Type
7) Specify the Radius or
Circumference.
Set for the Radius value of
1566,56. Circumference will be
updated automatically.
8) Position of sensors
AE-sensor position in case of the spherical location algorithm are given in Longitude and
Latitude. It is recommended to specify the sensor positions in an Excel table in the format:
CHAN, Longitude, Latitude and then import it into the location processor setup by using
04-2017 file: amsy-6_opman.docm 83 of 149
AMSY-6 Operation Manual
the “Clipboard Import…” button.
Following list gives the channel coordinates in following format: CHAN (Longitude in
degree, Latitude in degree): 1 (0,80), 2(45,65), 3 (135,65), 4 (225,65), 5 (314.8, 65), 6 (26,
19.8), 7 (77, 19.8), 8 (129, 19.8), 9 (181.1, 19.8), 10 (231, 19.8), 11 (283, 19.8), 12 (334,
19.8), 13 (1.2, -25.2), 14 (51.1, -25.2), 15 (103.3, -25.2), 16 (154.4, -25.2), 17 (206.5, -
25.2), 18 (257.6, -25.2), 19 (309.7, -25.2), 20 (30.2, -36.1), 21 (90.5, -36.1), 22 (150.7, -
36.1), 23 (210.9, -36.1), 24 (271.2, -26.1), 25 (331.4, -26.1), 26 (43.8, -65.2), 27 (136.4, -
65.2), 28 (227.1, -65.2), 29 (318, -65.2), 30 (180.1, -80.2)
9) Examine Neighborhood Table, Distances
The [[Neighborhood Table]] and
[[Distances]] buttons call up information
dialogs about the sensor array. These
dialogs contain information that help in
evaluating the location setup. This
information can also help to determine
some of the previous location settings
(step 1.3 and 1.4).
The neighborhood table is shown to the
right. For each line corresponding to
Channels 1 to 30 the neighbors are given
in ascending order according to their
distance from given channel.
10) Verify
The [[Verify]] button will automatically check for location settings that are questionable.
Any combinations of settings that are found questionable will be reported with a short
explanation. This can be helpful in determining if some of the location settings should be
modified.
11) Add a comment to the processor.
An advantage of giving a processor or diagram a comment is that in the structure tree the
processor/diagram will have a more descriptive identity.
For this example, a comment " L1 Spher. Net (Arr.)" was used.
Creating diagram from scratch
12) From the "Insert" menu, select the "AE-Diagram"
13) A data server dialog box will appear. Select the location processor that was created in
step 1. Then select [[Next]].
14) Diagram Wizard Dialog Box (Number of Axis)
Select “3 axes” and specify X,Y, and Z location result as attributes for the x-, y-, and z-
axis.
Click on [[Next]]
15) Diagram Wizard Dialog Box (Diagram type)
Choose the correlation type and click on [[Next]]
16) Diagram Wizard Dialog Box (Target page)
Choose a page from the page list and click on [[Finish]] (the default page).
04-2017 file: amsy-6_opman.docm 84 of 149
AMSY-6 Operation Manual
Define Cluster Processor
17) Insert Cluster Processor:
Click on the Cluster item of the Insert
menu.
When the Find Data Server Dialog Menu
appears, choose the location processor
and click on [[OK]].
18) Define Cluster processor
The Cluster Setup Dialog is shown on
the right side, containing setup
parameters for it.
19) Setup of Cluster processor
• Cluster Shape: Circular
• Cluster Size: 100cm for x-, y- and z-axis
• Fix limit color 1: 3
• Fix limit color 4: 8
20) Place Location Diagram under Location
Processor
Click on the edit structure icon on the
screen toolbar.
Drag the 3d location diagram and drop it
on the cluster processor line.
The 3d diagram should now be placed
under the cluster processor. Click [[OK]]
to exit.
Specifics of 3d location diagrams
By default x- and y-axis of a 3d plot are horizontal and
vertical axis of plotting plane, respectively. Z-axis is
oriented into the plotting plane resulting in a left-handed
coordinate system.
The 3d diagram supports distribution plots as well.
Distribution styles can be one of the following: Plates,
Blocks, Pyramids, Bands or Net
In case of distribution plots x-axis and z-axis are used
for binning. Make sure that y-coordinate attribute is
larger than 0.
In case of locations plots, the boundary of a sphere and
a tank bottom floor are automatically drawn, as well as
the sensor positions.
04-2017 file: amsy-6_opman.docm 85 of 149
AMSY-6 Operation Manual
How, When and Where is this Diagram Mainly Used?
The importance of a locating AE-sources and showing their locations in a diagram has already
been discussed and shown in section 9.4.
Actual Example
Location requires the grouping of multiple hits into events and calculating the position of the
events. In the example diagram, AE-source location on a gas storage sphere is shown in 3
dimensions. This example shows only a small extract of a full scale test. Only such events are
selected which occur in a limited region of the vessel. The concentration of events is
emphasized by the clusters.
04-2017 file: amsy-6_opman.docm 86 of 149
AMSY-6 Operation Manual
10 Examples of visuals in VisualAE Library
VisualAE has a built in library for accumulating AE-diagrams, location set-ups, listing
parameters. The library materials are templates that can be adjusted as needed. The user can
expand the library by authoring new library articles either by defining them from scratch or
modifying existing material. Some methods of multiplying these examples:
• Each axis attributes in VisualAE can be changed through pop-up menus.
• Planes in VisualAE's AE-diagrams can be manipulated quickly (change the plane's filter
with only a few keystrokes). Adding and deleting planes in AE-diagrams is very simple.
Some AE-diagrams in the library are defined with 6 planes, although this is not a limit.
• These graphs have been printed from MS-Word after being exported from single AE-
diagrams in VisualAE through the clipboard. VisualAE gives complete control over bitmap
size and relative size of text in AE-diagrams.
The Library in VisualAE can also be used for processors.
10.1 Examples of diagrams in Library
The following section contains some examples of diagrams that can be generated with
VisualAE.
Simple Correlation
This AE-diagram can easily be modified to
represent any correlation. Other common
correlations include
• Amplitude Vs. Duration
• Amplitude Vs. Energy
• Amplitude Vs. Risetime
Channel Activity
This AE-diagram can easily be modified to
represent any channel activity, for instance
energy or counts.
A right axis attribute can be added to
contrast to AE parameters against channel.
04-2017 file: amsy-6_opman.docm 87 of 149
AMSY-6 Operation Manual
Amplitude Distribution
This AE-diagram can also be used to show
differential distributions or with log-scaling
(for calculation of the "b-value," for
instance).
Each plane can be separately defined to
specify one specific channel, a range of
channels or all channels. Alternative or
additional filter conditions (for instance,
energy>100 or duration<10000) can also
be added to any specific plane.
RMS Status
An AE-diagram showing RMS-status can
be used to determine the general
background level for each AE channel
before and during testing.
For RMS-status, it only makes sense to
view individual channels. Other time
distributions with separate channel planes
can be obtained by modifying the y-axis
attribute.
Stress-Strain
Any parametrics that are sampled at the
parametric input can be plotted against
each other in this type of AE-diagram.
Depending on the parametric input, graphs
such as load-displacement, strain-
temperature can be generated, for
instance. Care must be taken when the
parametric range is not monotonically
increasing, a filter can be implemented to
limit the time range if necessary.
04-2017 file: amsy-6_opman.docm 88 of 149
AMSY-6 Operation Manual
Activity Graph
A right-axis load parametric and a
distribution in time can help reference
individual statistics. This type of AE-
diagram may use any AE-parameter with
several representation of the time
distribution (accumulated, averaged, etc...).
Amplitude time correlation
With a load parametric on the right-axis,
correlations in time can be more easily
referenced in this type of AE-diagram.
Many AE-parameters can be usefully
substituted for amplitude in this AE-
diagram, for instance energy or duration.
Cascade Comparison
This AE-diagram can show how well hits
were separated. Nearly identical cascaded
hits and hits indicate good separation. Two
alternative versions of this graph may also
be helpful:
• Counts, Cascaded-Counts vs. time
• Energy, Cascaded Energy vs. time
Poor separation may be improved by
adjusting rearm time, duration
discrimination time and threshold; however
there are other effects to consider.
04-2017 file: amsy-6_opman.docm 89 of 149
AMSY-6 Operation Manual
Planar Location
The simple AE-diagram found in the library
has been put under both a location and a
clustering processor. The location
processor makes available many location
calculations, including calculated locations
(x-, y-) arrival times, etc.
Cluster process can work with any
parameters, the x and y location was
chosen here. The density levels of the
clusters are under user control.
Linear Location
This AE-diagram has been put under a
location processor.
Amplitude versus time
An AE-diagram with an amplitude-time
correlation separated by channels is similar
to examples 3 and 4 which used
distribution.
Alternatives to amplitude can be used, as
described in example 6. Naturally a load
parameter can be added to the right axis.
04-2017 file: amsy-6_opman.docm 90 of 149
AMSY-6 Operation Manual
3D diagram: hits, time and amplitude
An AE-diagram with an amplitude-time
correlation separated by channels is similar
to examples 3 and 4 which used
distribution.
Alternatives to amplitude can be used, as
described in example 6. Naturally a load
parameter can be added to the right axis.
These examples found in the library are only the beginning, and a very small fraction of the AE-
diagrams possible in VisualAE. Simple modifications can be used by the user to obtain endless
variations on these AE-diagrams:
In VisualAE, any axis attribute (amplitude, energy) can be changed to another attribute from
within the AE-diagrams "property" dialog.
VisualAE allows easy addition and subtraction of "planes" from any existing diagram that
expands or removes the change and representation of the data.
A specific selection of data (filtered) can be chosen for each plane separately.
Any modifications to graphs can be stored in VisualAE's library of previously defined AE-
diagrams. These graphs can be recalled and modified. Each Library entry has specific
designation as to its origin (user-given title) and its author (these AE-diagrams have the author
specified as Vallen-Systeme).
10.2 Applied AE-diagram examples from VisualAE
Location on a Tank Bottom
This VisualAE AE-diagram displays
densely clustered events on a tank floor.
The top-down view helps to show the
position of the located AE as accurately as
possible.
04-2017 file: amsy-6_opman.docm 91 of 149
AMSY-6 Operation Manual
3D diagram of tank bottom location
The 3D perspective view in VisualAE helps
to show the relationship of the AE results to
the tank.
Background-burst overlay
The background noise level along with the
detection of AE signals are depicted in this
VisualAE AE-diagram. Both left and right
axis scales are fixed to correspond (1 µV=0
dB).
Typically, when the background
(continuous) noise level is 20 dB below the
threshold, the continuous RMS will not be
contributing to the collected hits, while
when the RMS is within 15 dB or less of the
threshold, continuous background will be
contributing to the threshold crossings.
Note when the RMS level is very low
(below 5 µV) the measurement is in the
digital steps and is less exact.
Signal loss against distance
By breaking pencil leads along a linear line
of sensors, a signal loss curve can be
generated very quickly. For this AE-
diagram, the position of pencil leads is
moved forward at a constant rate, 10 cm
every 30 seconds. A user processor then
converted the time [s] to distance for this
graph.
04-2017 file: amsy-6_opman.docm 92 of 149
AMSY-6 Operation Manual
Spherical location
VisualAE provides the means to quickly
and easily display the results of location on
spheres, including rotating the sphere to
observe the AE location from the optimal
perspective.
Speed of sound
Another source of information from an
attenuation study (see example 2.4) is
propagation delay. By plotting an AE-
diagram with arrival time differences along
with a distribution (acting as a trend),
VisualAE can make the velocity from such
a graph easy to visualize.
Location Uncertainty (LUCY), planar location
In planar location, 3 arrivals can determine
a location, when 4 or more arrive one can
verify the accuracy. The LUCY function,
based on the standard deviation of the
possible locations. The 3D projection can
help one to gain confidence or direct one to
problem areas, depending on the results.
04-2017 file: amsy-6_opman.docm 93 of 149
AMSY-6 Operation Manual
Superimposing data and interpretation
In this example, data and interpretation are
superimposed in one AE-diagram.
All the data (represented as an amplitude
point plot which has also been sub-divided
into two planes by the interpretation
criterion, 65 dB). A right axis load graph is
added.
For interpretation (and post-test correlation
with a microscope), a distribution line graph
is placed behind the plot. Each line can be
checked visually.
Highlighting results
Activity during increased loading is an
important criterion for structural evaluation,
however it can often be difficult to easily
represent.
This VisualAE AE-diagram uses planes to
highlight the regions of increased AE
activity that corresponds to subsequent
load increase areas.
04-2017 file: amsy-6_opman.docm 94 of 149
AMSY-6 Operation Manual
11 Page Analysis and Page Layouts in VisualAE
In VisualAE, pages are interactive analysis units where AE-diagrams, TR-diagrams and AE-
Listings can be viewed together. When selecting a data point in an AE-diagram correlation (left
mouse button), VisualAE
• Display the value of the data in the selected point (in a bubble)
• Move the linked TR-diagrams to the corresponding TR-signal.
• Move the linked AE-Listings to the line in the AE-listing corresponding to the selected point.
VisualAE pages are also more than just collections of graphs, but also offer presentation
features independent of the graphs alone, including page legends and captions, page layouts,
ability to print or store complete pages.
Pages, AE-Diagrams and Listings
VisualAE allows fast correlation between the listing of the AE data and the graphical
representation.
Listings contents can be flexibly chosen and arranged as desired. The on-screen listing can be
scrolled. Also, when AE-diagrams, AE-Listings and TR-diagrams are displayed on the same
page and within the same process they are interactive -select a hit on one graph and the
corresponding hit will be highlighted or found on the other diagrams.
AE-Listings can be customized to show the exact parameters the user chooses. The example
shows the location graphs. The listing can be scrolled or the layout changed to show additional
results.
04-2017 file: amsy-6_opman.docm 95 of 149
AMSY-6 Operation Manual
Pages, AE- and TR-diagrams
VisualAE allows the merging of traditional AE analysis and signal analysis. When both AE-
diagrams and TR-diagrams are displayed on the same page and within the same process,
selecting a single AE hit will make reference to the corresponding hit on the other
representation.
Further analysis can be performed by running VisualTR, even simultaneously with VisualAE.
With VisualAE identifying the signals of interest, VisualTR can display them conveniently for
comparative analysis.
Perspectives of AE 3D diagrams
The image below shows perspectives of the same VisualAE's 3D AE-diagrams, with graduated
levels.
Not only can the graphs be rotated and stretched easily, the graphs can be shown with and
without perspective viewing, without axis and with various representations (blocks are used at
right, correlation, nets, pyramids, etc. can also be used.
04-2017 file: amsy-6_opman.docm 96 of 149
AMSY-6 Operation Manual
Correlation and distribution on the same axis
The left y-axis in the upper diagram has both correlation and distribution data represented. The
distribution is the average x-location in the time period, whereas the correlation points represent
the locations of the individual points.
Several alternative page layouts
VisualAE has provides a default layout depending on the graphs per page; but there are many
alternatives. The examples in this section are of different layouts, getting progressively denser.
04-2017 file: amsy-6_opman.docm 97 of 149
AMSY-6 Operation Manual
The choice of layout can be used to emphasize and optimize the specific graphs displayed in
each analysis.
Customizing the analysis
Individual planes can isolate specific AE hits/events. VisualAE can then help to pick out
statistical trends that are extremely difficult or impossible to find on older software programs.
Here, damping is progressively introduced between a pulser and receiver. The parametric input
0 increases when damping increases as well. Statistics and signals can be examined showing
exactly what happens to the data.
04-2017 file: amsy-6_opman.docm 98 of 149
AMSY-6 Operation Manual
Locations and TR-events
When combined, the elements of location, clustering, TR-signals and AE statistics VisualAE
gives a much more detailed look at actual AE data than ever before possible.
Here a page is filled with data pertaining to location: the y- and x-axis data, TR-signals from the
1st, 2nd, and 3rd hit sensors (as found by clicking on the located event), the location uncertainty
and the total energy recorded on each channel.
Colors, planes and pages
Data groups and analysis can be emphasized by using the same colors on the same conditions
for different graph parameters.
Here, events with the lowest LUCY (dark blue) follow closely the actual path of the growing
crack (as seen visibly). The middle LUCY (red) and high LUCY (light blue) are scattered
progressively further from the path of the observed crack growth.
Defining planes that correspond to these LUCY levels, one can study any other AE or
parametric data with respect to ease of location.
04-2017 file: amsy-6_opman.docm 99 of 149
AMSY-6 Operation Manual
04-2017 file: amsy-6_opman.docm 100 of 149
AMSY-6 Operation Manual
12 Example of location diagrams in case of a pressure
vessel
An important part of an AE-test of a pressure vessel is location AE-sources. Locating AE-
sources requires location algorithms suitable for the shape of a pressure vessel. A pressure
vessel can have complex shapes, e.g. a vertical pressure vessel consists of cylindrical hull
section and a top- as well as bottom end cap. Additionally manholes, pipe in- as well as outlets
may be present. While it is not possible for AE-source location to consider a pressure vessel in
its total complexity the main features of it: cylindrical hull and (spherical) end caps can be
modeled in a location processor.
In this example, data is taken from an AE-test of a pressure vessel with cylindrical hull section
and spherical end caps at both ends.
The degree in complexity of modeling the pressure vessel’s hull depends on available location
algorithms. Best results are obtained if a spherical location algorithm is used for locating
sources on end caps. In a second approach, which will be illustrated, end caps are projected
onto a plane. It will be shown that the type of projection has influence on quality of location
results. Two types of projections are compared:
• Orthographic projection
• Lamberts azimuthal equal-area projection
Section 12.1 describes location with spherical location algorithm. Section 12.2 describes
location when end caps are projected onto a plane. Comparison of results can be found in
section 12.3.
12.1 Using spherical location algorithm to located AE-sources on
end caps
In this section a location processor is set up which models location on a pressure vessel with
spherical end caps as exact as possible. Setting up location processor requires following steps:
1) Insert Location Processor (see
section 8.3 for more information)
2) Specify the Channels in the Event
Builder.
Enter all channels that contribute to
event data set assembly and thus to
location calculation.
For more information see section
8.2.
3) Specify "Event assembling time
criteria" and “General location
settings” to complete this tab of the
location processor.
04-2017 file: amsy-6_opman.docm 101 of 149
AMSY-6 Operation Manual
4) Change to “Channel Positions” tab
and create three Channel Groups,
one for cylindrical part of hull and
one for each of top- and bottom
end cap.
A planar location algorithm is used
for cylindrical part of hull. A
spherical location algorithm is
used for end caps.
In case of planar location
algorithm sensor positions are
given in Cartesian coordinates.
For the spherical location
algorithm sensor positions are
given in degree longitude and
latitude.
5) Coordinate system of spherical location algorithm is chosen in such a way that sensors
are positioned on upper half sphere, i.e. where latitude is always larger than 0°.
Convention of spherical coordinates:
• LATI: 0° latitude corresponds to equator of sphere
• LONG: longitude is measured from 0° to 360° counter clock wise
12.1.1 Displaying results of location processor
Results of location processor are displayed in three independent diagrams. How this is achieved
is demonstrated by considering following Data Processing Structure.
The first filter processor, Fl1, rejects hits
which are timed out, i.e. lasted longer
than 100ms (T-flag) and hits that have
been started artificially (A-flag).
The second filter processor, Fl2, rejects
hits that are considered implausible, i.e.
hits with short rise time, duration or low
number of counts.
Location processor Lc1: Hull and End
Caps (as defined in section 12.1)
calculates location results.
Filter processors Fl4 (“Hull CHGPR”), Fl6
(“Upper Half Dome CHGRP”) and Fl8
(“Lower Half Dome CHGRP”) are channel
group filters that let pass only data from
one channel group which is linked to a
certain part of the hull. These filter
guarantee that in subsequent visuals only
data from a certain hull part (= a specific
channel group) is displayed.
04-2017 file: amsy-6_opman.docm 102 of 149
AMSY-6 Operation Manual
For the spherical end caps we expect located data only on upper half of a sphere, where
LATI>0. The location algorithm may also yield results on lower half of sphere but this is clearly
unreliable data. This can happen if a wave propagates from cylindrical hull section to end cap
and is picked up by sensors mounted on the end cap. In order not to get confused with this kind
of data a filter processor (“LATI > 0°”) follows right after the channel group filters Fl6 and Fl8.
Before displaying results a “LUCY Filter” is inserted which rejects location data where LUCY is
unacceptable high. A high value of LUCY indicates that location result is not reliable and there
may have been errors in arrival time measurement because of overlapping hits or very weak
signals. Location data that is considered unreliable is not plotted in subsequent location plots.
Figure 21: results of location algorithm on cylindrical part of hull. Clustering summarizes active
areas on hull.
Diagrams show results for each channel group in figure 21 and figure 22, individually. Since end
caps are modeled by spherical location processor, results are available in 3D.
04-2017 file: amsy-6_opman.docm 103 of 149
AMSY-6 Operation Manual
Figure 22: location results of lower end cap. Figure 23: location results of upper end cap.
Results are available in 3D. Viewing Results are available in 3D. Viewing
position is right above North pole. position is right above North pole.
12.2 Approximating end caps with planes for planar location
algorithm
Another way of locating AE-sources on end caps is by approximating them with a plane.
Unfortunately an exact mapping of a spherical surface onto a plane is not possible. Therefore
any mapping of a sphere on a plane is just an approximation. Two projection types have been
chosen to illustrate the difference compared to spherical location algorithm:
1. Orthographic projection
2. Lambert azimuthal equal-area projection.
12.2.1 Orthographic projection of end cap onto a plane
Planar coordinates x and y are calculated as follows:
𝑥 = 𝑅 cos(𝐿𝐿𝐿𝐿) sin(𝐿𝐿𝐿𝐿)
𝑦 = 𝑅 cos(𝐿𝐿𝐿𝐿) cos(𝐿𝐿𝐿𝐿)
R, LATI and LONG correspond to radius of end cap, latitude and longitude.
In this example a second location processor, LC2, is inserted. This location processor consists
of three channel groups, one for cylindrical part of hull and one for each end cap. End cap
location algorithm is a planar one and sensor positions are projected onto a plane according to
orthographic projection.
04-2017 file: amsy-6_opman.docm 104 of 149
AMSY-6 Operation Manual
Location processor Lc2: Hull and End
Caps (planar with orthographic projection)
approximates spherical end cap by a
plane.
Filter processors Fl16 (“Hull CHGPR”),
Fl13 (“Upper Half Dome CHGRP”) and
Fl15 (“Lower Half Dome CHGRP”) are
channel group filters that let pass only
data from one channel group which is
linked to a certain part of the hull. These
filter guarantee that in subsequent visuals
only data from one channel group is
displayed (or in subsequent processors
only data from one channel group is
available).
Resulting location diagrams of end caps
are shown below.
Figure 24: location results of lower end cap. Figure 25: location results of upper end cap.
Results are available in 2D. Results are available in 2D.
04-2017 file: amsy-6_opman.docm 105 of 149
AMSY-6 Operation Manual
12.2.2 Lambert projection of end cap onto a plane
In case of a half sphere a Lambert’s projection is defined as:
2R
x=� R cos(LATI) sin(LONG)
R − R cos(LATI)
2R
y=� R sin(LATI) sin(LONG)
R − R cos(LATI)
R, LATI and LONG correspond to radius of end cap, latitude and longitude.
In this example a fourth location processor, LC4, is inserted. This location processor consists of
three channel groups, also. One of them for cylindrical part of hull and one for each end cap.
End cap location algorithm is a planar one and sensor positions are calculated according to
Lambert’s projection rule.
Location processor Lc4: Hull and End
Caps (planar) – LAMBERT Projection
approximates spherical end cap by a
plane.
Filter processors Fl20 (“Hull CHGPR”),
Fl24 (“Upper Half Dome CHGRP”) and
Fl22 (“Lower Half Dome CHGRP”) are
channel group filters that let pass only
data from one channel group which is
linked to a certain part of the hull. These
filter guarantee that in subsequent visuals
only data from one channel group is
displayed (or in subsequent processors
only data from one channel group is
available).
Resulting location diagrams of end caps
are shown below.
04-2017 file: amsy-6_opman.docm 106 of 149
AMSY-6 Operation Manual
Figure 26: location results of lower end cap. Figure 27: location results of upper end cap.
Results are available in 2D. Results are available in 2D.
12.3 Comparison of end cap location results
Results of three location processors, spherical location processor, planar location processor
with orthographic projection of sensor positions and planar location processor with Lambert’s
projection of sensor positions are compared in following tables
On lower end cap only high amplitude (A>75dBAE) located events are compared.
Lower End Cap Spherical orthographic projection Lambert's projection
DSET A LONG LATI LUCY LONG LAT LUCY LONG LATI LUCY
585575 76,1 119 31 37 123 44 37 119 24 18
592316 77,2 283 37 48 not located not located
598517 77,6 7 39 26 17 45 37 9 43 32
614223 77,6 26 23 44 not located 26 12 32
615557 78,7 342 62 53 355 69 47 343 64 50
618562 76,9 44 35 47 31 40 120 43 35 42
619077 79,9 100 61 56 118 65 47 102 63 50
625941 89,3 136 61 31 127 72 46 137 65 28
638018 78 6 42 22 23 40 53 11 44 31
Table 1: comparison of location results on lower end cap. Results of spherical location
processor are shown in group “Spherical”. Results of planar location algorithm with
orthographically projected sensor positions are shown in group “orthographic
projection”. Results of planar location algorithm with Lambert’s projected sensor
positions are shown in group “Lambert’s projection”. LUCY result in red font indicates
that it exceeded an arbitrarily set threshold and location result is therefore considered
unreliable.
Location results of DSET 615557 and 619077 of spherical location processor are not shown in
location plot (see figure 22) because their LUCY exceeds an arbitrarily set threshold. In contrast
planar location algorithm with Lambert’s projection of sensor positions locates all but one event
(DSET 592316). However, this located event is questionable since closer analysis of sequence
of hit channels indicates that two events were overlapping, one in vicinity of channel 50 (AE
04-2017 file: amsy-6_opman.docm 107 of 149
AMSY-6 Operation Manual
source probably located towards channel 49) and one on cylindrical part of hull in vicinity of
channel 33.
Only few locations are present on upper end cap. Therefore all of them are compared
independent of peak amplitude.
Upper end cap Spherical orthographic projection Lambert's projection
DSET A LONG LATI LUCY LONG LAT LUCY LONG LATI LUCY
5029 43 338 85 25 66 66 48 45 84 4
581546 42 223 26 42 214 25 71 224 12 49
592653 55,8 loc. on wrong half sphere not located 175 21 -1
600861 42,6 not located not located 136 -70 -1
611332 47,9 91 37 -1 86 48 -1 99 41 -1
614914 48,6 144 27 -1 not located 142 -6 43
620119 44,5 43 51 64 22 48 23 37 39 57
646554 41,5 225 23 -1 194 41 -1 not located
Table 2: comparison of location results on upper end cap. Results of spherical location
processor are shown in group “Spherical”. Results of planar location algorithm with
orthographically projected sensor positions are shown in group “orthographic
projection”. Results of planar location algorithm with Lambert’s projected sensor
positions are shown in group “Lambert’s projection”. Red font in LUCY column
indicates results that are not shown in diagram because of an arbitrarily set LUCY
filter. Red font in LONG / LATI columns indicate positions that are mapped to lower
part of sphere.
Location results of hits with low amplitude are in general afflicted with larger error or uncertainty.
Because of a LUCY filter which was set to an arbitrary value not all located hits are shown on
the upper end cap (see figure 23). Planar location processor with Lambert’s projection of sensor
positions locates all locatable events but one (last one in table 2). However location result of
DSET 646554 is questionable since only minimum number of sensors contributed to location
result and peak amplitude was close to threshold of 40dBAE.
Location results of planar algorithm fit better to spherical location results when Lambert’s
projection is used. Lambert’s azimuthal equal-area projection distorts distances close to equator
but not to same extent as orthographic projection does. Hence Lambert’s projection is more
suitable for approximating a half sphere.
In all cases, located AE-sources should be verified after the test. This is especially true for
planar approximations of end caps.
12.4 About the diagrams used in this example
2D location diagrams (figure 21, figure 24, figure 25, figure 26 and figure 27) use a background
image to show contours of hull. Background image in figure 21 even shows welds. Background
images were created by use of Corel Draw© but any other drawing tool can be used. Aspect
ratio of rectangles should be correct, since scaling is done in background image setup tab.
04-2017 file: amsy-6_opman.docm 108 of 149
AMSY-6 Operation Manual
Figure 28: background image setup tab of Diagram Properties dialog.
A background image can be selected by browsing (Browse button) through folders. Scaling and
positioning of image is done via Y-Min, Y-Max, X-Min and X-Max fields specifying lower left –
and upper right corner.
12.4.1 Advanced application of background image
In figure 29 both end caps and cylindrical part of hull are shown in one diagram. Previous
diagrams (see figure 21 to figure 27) showed only a single part of the hull, i.e. bottom- or upper
end cap or cylindrical hull. To achieve this kind of diagram a suitable location processor has to
be inserted a background image has to be generated.
Figure 29: location diagram showing results of both end caps and cylindrical part of hull in one
diagram.
04-2017 file: amsy-6_opman.docm 109 of 149
AMSY-6 Operation Manual
Modifying location processor
A location diagram as shown in figure 29 can only be generated when all location algorithms
that are used for each individual channel group yield as result x- and y-coordinates. Achieving
separation of bottom end cap, hull and top end cap from each other end caps have been shifted
in y-direction. For top end cap offset in y-direction was -1000cm. For bottom end cap offset in y-
direction was 4000cm. This kind of offset has no influence on location results.
Generating background image
Background image was generated by the use of Corel Draw©, but any other drawing program
can be used. Aspect ratio of rectangle (cylindrical hull part) compared to circle (end caps) has to
be correct, so that scaling of the background image in the diagram does not distort the shapes.
04-2017 file: amsy-6_opman.docm 110 of 149
AMSY-6 Operation Manual
13 Results in VisualAE
AMSY-6 system offers various results which are either directly measured, such as Arrival-time,
Peak amplitude, Parametric Input, etc., or calculated, such as location results, delta-t, or signal
slope. In addition, there are logical results (flags) that indicate special situations, such as multi-
peak, hit-time-out, etc.
Each result has an identifier used in the filter editor, in plot legends, in listing headers, etc. This
identifier is also used in the menu in which the user selects the desired result for plotting or
listing. An extensive help text is provided in which a user quickly finds description of each
offered result.
Any numerical result can be selected as an axis attribute of a graph.
Most of the numerical and logical results are available for listing as well as for filtering.
The term "hit" means the AE signal of one event received by an independent channel. Several
channels can receive hits from one and the same event. Those hits are collected to an event
data set by the analysis software.
In the following description of the AMSY-6 results, the abbreviation of each result is shown:
13.1 Hit Data
Hit data are generated by each AE channel independently, and describe usually one or a series
of discrete AE signals with a clear beginning and end. The beginning of a hit is defined by its
first threshold crossing, the end, by the absence of threshold crossings for a user-defined period
of time, (the Duration Discrimination Time). A hit cascade is a series of discrete hits. The end of
a hit-cascade is defined by the absence of threshold crossings for the selected Rearm Time.
Hit data sets contain the following information:
HITS: Hits
This returns the value 1 for each hit data set, to be used in cumulative- or rate plots.
Visuals placed behind a location processor usually use only first hits of events. In case another
hit parameter is used as axis attribute the user can select if only first hits of events or all sub hits
of an event shall be used for plotting the diagram. Separate counters per channel are used, if
one axis is assigned to CHAN.
CHAN: Channel Number
This is the logical number of the channel that has produced the data set.
TS: Arrival Time
This is the absolute time of the first threshold crossing of a hit. It is measured and stored by
each channel individually in steps of 100ns (can be set to 50ns or 25ns resolution with ASIP-
2/A). It is used to identify a hit (in combination with the channel number) and to calculate the
event's source location (in combination with the arrival times of other hits).
In listings, the arrival time appears in long format "dd hh:mm:ss xxx.xxxx" whereby
• dd = day 0,1,2…n (optional)
• hh = hour
04-2017 file: amsy-6_opman.docm 111 of 149
AMSY-6 Operation Manual
• mm = minute
• ss = second
• xxx.xxxx= ms, with a resolution of 0.1µs.
For graphs, the arrival time can be selected as TS (time in seconds) or as TH (time in hours).
TS and TH start at zero with the time of the start criterion of analysis. The absolute time
belonging to that zero-point is shown in long format in the legend of the graph.
For longtime tests that go over the end of a month, the day is not reset to 1; instead, it is
incremented each day until the test ends. This ensures that the internal time is always
incremental.
A: Burst Signal Peak Amplitude
This is defined as the peak amplitude of a hit. The peak amplitude (A) is given in dB above 1µV
referring to the preamplifier input (0dB = 1µV, 20dB = 10µV, 40dB = 100µV, etc.). Maximum is
99.9dB (98.9mVPK) at 34dB preamplifier gain. The peak amplitude is extracted from a stream of
16 bit samples (resolution of 3µV at ±100mV range) and then converted to and stored as an 8
bit value with a resolution of 0.3763dB (20 * log(2) / 16) and an offset of 9.9dB.. The software
takes the chosen preamplifier gain into account when displaying amplitude results.
ALIN: Burst Signal linear Peak Amplitude
Peak Amplitude in µV. (Derived from the Peak Amplitude in dB)
THR: Threshold
The first crossing of the threshold level is the start of a hit. The end of the hit is reached when
the input voltage does not cross the threshold for a specified period of time (called the duration
discrimination time). The threshold is a dB-value of same range and resolution as the peak
amplitude.
In case of a floating threshold, the threshold can vary during a test. Because of this, the
threshold is not only a parameter but also a result.
E: Burst Signal Energy
Energy is the integral of the squared AE-signal over time. Its unit is eu. 1 eu corresponds to
-14
10 Vs². By definition the resistance is 10kΩ which is used to scale the units Vs² to Joule. Using
-18
this reference resistance 1eu corresponds to 1aJ (10 J).
SS: Burst Signal Strength
Signal strength is the integral of the rectified AE-signal over time. The unit of Signal Strength is
-9
nVs (10 Vs). Signal Strength result is referred to the preamplifier input.
R: Burst Signal Rise-time
The Rise-time is the time between the first threshold crossing and the first peak detected in a
hit.
The resolution is 200ns if R < 800µs else 0.025% of the value. Maximum value supported by the
internal representation is 50s, limited to the value of the duration.
D: Burst Signal Duration
The Duration is the time between the first and last threshold crossing of a hit.
04-2017 file: amsy-6_opman.docm 112 of 149
AMSY-6 Operation Manual
The resolution is 200ns if D < 800µs else 0.025% of the value. Maximum value in the internal
representation is 50s. Duration of a hit is limited to about 100ms by the time-out feature of the
AMSY-6.
CNTS: Ring down count
Counts are the number of positive threshold crossings of a hit. Range is limited to the maximum
of 65535 (per hit).
CCNT: Cascaded Counts
Cascaded Counts are the sum of all ring down counts of hits belonging to the same hit cascade.
Range is 1 to 65535 (per hit-cascade).
RMS: Background Noise
The RMS Background noise is the root-mean square value of the noise on each channel during
pauses of threshold crossings. It is derived from the energy measurement. If no hits arrive, the
energy is accumulated in time slices of 13ms. The energy rate per 13ms time interval is fed over
a variable digital low-pass filter to achieve the user-selected time constant.
The RMS is presented in µV related to the sensor output (preamplifier input). The software
takes the selected gain into account.
The result “RMS”, included in the hit data set, is a measure of the noise before the hit. The
result “RMSS” is part of the status set (see below).
CENY: Cascaded Energy
The Cascaded Energy is the sum of the energies of the first-hit and all subsequent hits in a hit-
cascade.
CSS: Cascaded Signal Strength
The Cascaded Signal Strength is the sum of the Signal Strength of the first-hit and all
subsequent hits in a hit-cascade.
CHITS: Cascaded Hits
Cascaded hits are the total number of hits in a hit-cascade.
TRAI: Transient Recorder Index
The Transient Recorder Index is a unique number that identifies the transient recorder data
belonging to a hit. A TRAI will be generated only if transient recording is triggered due to a
threshold crossing. Hits that have no transient data associated to them do not have a TRAI. A
filter condition of TRAI > 0 rejects all hits without transient data.
noTRAI: no Transient Recorder Index
noTRAI is a flag set to 1 if a hit has no transient data. It is set to 0 if a hit has transient data
associated to it. A filter condition noTRAI = 0 rejects all hits with transient data.
13.2 Hit Data Flags
Hit Data Flags are used to indicate special conditions during a hit. These can be shown in a
listing and they can be used as filter criteria.
0 means false, 1 means true. The following flags are provided:
04-2017 file: amsy-6_opman.docm 113 of 149
AMSY-6 Operation Manual
TOAB: Time-out aborted Signal
This indicates a very long hit or hit-cascade (>100ms) which has been terminated by a time-out
process. In the case of suddenly increasing noise (caused by a leakage for example), the hit
evaluation is terminated by a time-out function to keep the time sorting process running.
In the listing, this flag is indicated by a "T".
ATOA: After Timeout Signal
This indicates an artificially started hit after hit time-out (see above). Arrival time, risetime and
duration of this hit are not meaningful. Meaningful are the results Cascaded Counts, Cascaded
Energy, Amplitude. This hit is not suitable for location calculation and therefore automatically
ignored by a location processor.
In the listing, this flag is indicated by an "A".
EXTC: Extended Cascading
This indicates a temporary "long-rearm mode" which prevents buffer overflow, because the PC
was not able to read out data fast enough.
In the listing, this flag is indicated by an "E".
DTOS: DDT too short
This indicates a temporary "long duration discrimination mode": At the user-defined DDT, the
detected hit rate is too fast to be processed.
In the listing, this flag is indicated by a "D".
ROVL: Rearming Overlap
This indicates that at least one hit has been detected during rearming. It has the same meaning
as "CHIT > 1".
Hardware rearming means waiting for a pause of threshold crossings for a user-defined period
of time (the rearm time) before the channel is enabled to trigger a new evaluation of a hit-
cascade.
In the listing, this flag is indicated by an "R".
CAL: Coupling Pulse
(Formerly called Calibration pulse) This indicates a signal that has been generated by the test
pulse through feature of the AMSY-6; which is to be used for the determination of the velocity of
sound and for the confirmation of proper sensor coupling.
The flag is set in the signal data set of the emitting channel. When the software finds that flag
set, it sets the flag internally for all hits generated within the ”hit tracking time”, a user controlled
parameter.
The filter operation "CAL =1" allows only the transmitted and received test pulses to pass the
filter. The filter condition "CAL =0" excludes such signals from an analysis process. Note: To
eliminate test pulse data from a plot, you can also use a label filter.
CAL1: Coupling Pulse (sent)
CAL1 indicates hit data sets generated by the test pulse in the sending channel.
CAL1 is shown in the listing as upper case "C".
04-2017 file: amsy-6_opman.docm 114 of 149
AMSY-6 Operation Manual
CAL2: Coupling Pulse (received)
CAL2 indicates a hit with a delta-t to the previous CAL1-flagged hit of less than the hit tracking
time set in VisualAE/Edit/Project Settings/other.
CAL2 is shown in the listing by a lower-case "c".
SATR: Saturation of Measurement Chain
SATR indicates when the amplitude of a hit exceeds 95% of the input range (5Vp). If hit
amplitude exceeds 95% of the input range this is also indicated by a yellow flashing THR LED at
the ASIP-2 front panel.
If saturation occurred for a hit, this is indicated by a “S” flag in the listing.
13.3 Status Data
Each channel generates status data sets in a time driven manner according to the user-defined
status interval. Status data sets are also generated every time the transient recorder of a
channel is triggered externally. Status data sets contain mainly the following results:
CHAN: Channel Number
The number of the channel that has produced the status data set.
RMSS: Background noise
This has the same meaning as RMS in hit data. It characterizes the background noise.
ENYS: Energy between two status data sets
The total energy rate including hits and background noise during the time period between two
status data sets.
SSS: Signal Strength between two status data sets
The total signal strength rate including hits and background noise during the time period
between two status data sets.
13.4 Parametric Data
Parametric inputs are measured in the time interval defined by Parametric Clock (0.2…10ms).
The latest measurement is stored in a parametric data set, before the next hit data set. When
hits arrive in shorter time distance than Parametric Clock, only one parametric data set is
stored. When no hits arrive, parametric data sets are written at user-defined Parametric Interval
(10 ms…600 s). Parametric results can be used to analyze AE data versus parametric
information, e.g. load, pressure, temperature, etc., in correlation and distribution plots.
Parametric data can be plotted independently from AE data in history plots.
PA0...PA*: Parametric Analog Inputs
At ±10V input range all analog inputs in a range of -10240mV to +10235mV are digitized with
0,315mV resolution, in the menu-selected time interval: range 200µs to 10ms.
Each measurement of these inputs is addressed by "PAx" whereby "x" identifies the channel
number. The peak to peak noise of the internal ADC is 2mV maximum.
The selected input range (±10V or ±1V) is automatically taken into account.
04-2017 file: amsy-6_opman.docm 115 of 149
AMSY-6 Operation Manual
PA0U...PA*U: Parametric Analog Inputs in user units
In addition to PA*, PA*U can be defined in any linear converted engineering unit, such as N,
bar, etc.
Measured units of mV can be converted into other engineering units by use of a linear
transformation. Parameters for transformation are an offset- and factor value. Offset and factor
can be entered in the parametric conversion dialog (Edit/Parametric Conversion). The offset in
mV is subtracted from measured value (in mV) and result is multiplied by a factor in user units
per mV.
PCTA: Analog-Controlled Counter
A 64bit signed counter, which is incremented when the voltage at PA0 crosses a user-defined
trigger level in a certain direction.
A tunable hysteresis band avoids triggering by noise.
PCTE: Extended PCTA
Same as PCTA, kept for compatibility reasons
PCTD: Dig. Controlled Counter
This identifies an additional 16-bit-counter. PCTD is incremented by the leading and the trailing
edges of an external clock pulse, if enabled by an external enable input. This counter can be
cleared by an external reset input (TTL-inputs, externals connector). If PCTD is to be used
PCTA (but not PCTE) can be used simultaneously.
CYSL: Cycle Slope Flag
This indicates the direction of the voltage change of the analog input that is selected as the
PCTA-counter-input, normally measuring a cyclic load.
This flag can be used as a filter criterion to separate AE measured during increasing load, from
AE measured during decreasing load.
Zero means a negative change.
One means a positive change.
If there is no change, the flag remains in its previous state.
Note: If noise is added to the input signal, this noise may influence the CYSL flag, too.
PULS: pulsing sequence flag
A flag set to 1 during a pulsing sequence. It is set to 0 after finish of pulsing sequence. It can be
used to filter all hits and parametric data that occurred during a pulsing sequence. Please note
that PULS flag is set approximately 500ms before pulsing sequence starts and reset to 0
approximately 500ms after pulsing sequence finished.
13.5 Location Results
A location processor generates location results. The setup is independent from the data
acquisition and can be changed at any time during or after data acquisition. The program
always uses the most recent version of that setup. The setup is stored on the .vae file.
04-2017 file: amsy-6_opman.docm 116 of 149
AMSY-6 Operation Manual
EV: Events
This identifies a counter in the analysis program that counts the number of events detected by
the channels of the selected location processor. All hits coming from a common acoustic source
are collected and only the first-hit of an event increments that counter.
Selecting EV makes only sense in distributions or cumulative histories. In correlations, the value
"1" would be shown for each event.
SIGS: Signals of Event
It gives the number of processed hits for the current event.
1.CH…7.CH: Channel Sequence
This means the sequence number of a hit.
Example: An event hits first channel 2 then 4 and then 3. Then:
1.CH would be 2,
2.CH would be 4,
3.CH would be 3.
DT12...17: Time Difference
th
Each of these results reflects the time distance between the first-hit and the n hit of an event
(mainly provided for filtering). For listing use DT1X.
DT1X: Time Difference
This is the time difference between the first-hit of an event and the subsequent-hit currently
being processed. It is mainly used in listings.
X, Y, Z:
Local coordinates; local coordinates are used by the location algorithm. Each sensor group has
its own local coordinate system.
For circular structures, the valid range for X is (-0.5...+0.5) * circumference.
In case of cylindrical structures Y-axis runs parallel to the axis of revolution.
For spherical results, X corresponds to the projection of the radius vector onto the x-axis.
For spherical results, Y corresponds to the projection of the radius vector onto the y-axis.
For spherical results, Z corresponds to the projection of the radius vector onto the z-axis.
GX, GY, GZ
Global coordinates; shall be used in 3D diagrams. Global coordinates take into consideration
translation and rotation of sub-parts (e.g. heads and barrel) of an object such as a pressure
vessel.
LONG: Longitude
This means the degree longitude of a sphere. LONG is available for spherical location, only.
04-2017 file: amsy-6_opman.docm 117 of 149
AMSY-6 Operation Manual
LATI: Latitude
This means the degree latitude of a sphere. LATI is available for spherical location, only. 0
means equator, +90 means North Pole (top of sphere), -90 means South Pole (bottom of
sphere).
LUCY: Location Uncertainty
LUCY represents the location uncertainty of an event in selected location units.
The calculation of LUCY requires that more channels have been hit than needed for the location
calculation. For example: 3 hits are needed to calculate a planar location. 4 hits would be
needed to calculate the location uncertainty for a planar location.
As a filter criterion, LUCY can separate location results by its uncertainty and show only the
more trustworthy locations.
CGRP: Channel Group Number
Number of the channel group of the location processor. Using this in a plane filter of a location
diagram lets one easily see which location set in a channel group has led to which result.
RANK: Location Ranking
This result gives a ranking of multiple location results per event in a location group that lets one
easily select the result with the lowest LUCY (location uncertainty).
13.6 Grading Processor Results
GpSv
Severity; value describing the hits with highest amplitudes
GpHI
Historic Index; describing the relation of the most recent hits to all previous hits
GpRs
Grading Result (in development)
GpMHI
Maximum historic index
GpCt
Number of hits used for calculation.
13.7 Administrative Results
LABL: Label Number
This means the number of a text label inserted into the data stream either automatically by the
system or by the operator. It can be used for filtering and as start and termination criterion for
the analysis process.
DSET: Data Set
04-2017 file: amsy-6_opman.docm 118 of 149
AMSY-6 Operation Manual
This means a sequential number assigned to each data set in the primary data file at the time of
the data analysis. For example, DSET can be used in a plot to find out the data set no. of a
particular data range for using it as a start and/or termination criterion of the analysis process.
13.8 TR-Feature Extractor Results
These results are extracted from transient recorder data by the Feature Extractor Utility (part of
VisualTR), stored on the Feature File and read by the analysis program (e.g. VisualAE).
FCOG: Center of Gravity of Frequency Spectrum
This gives the frequency in kHz at which the spectrum has its center of gravity.
FMXA: Frequency at max. Amplitude of Spectrum
This gives the frequency in kHz at which the spectrum shows the maximum amplitude.
PA
Peak Amplitude of a transient that has been recorded to a transient date page
RT
Rise time of a transient that has been recorded to a transient data page. Rise time is the time
from first threshold crossing to time of peak amplitude.
Dur
Duration of a transient that has been recorded to a transient data page
CTP
Counts to peak, meaning number of positive threshold crossings from first threshold crossing to
peak amplitude based on a transient that has been recorded to a transient data page.
FI
Initiation frequency calculated as counts to peak divided by risetime.
FR
Reverberation frequency calculated as ring down counts divided by ring down time, whereby
ring down counts is simply CNTS-CTP and ring down time is Dur-RT.
Tx_FFT.CoG
h
Frequency of center of gravity (similar to FCOG) of x time segment
Tx_FFT.FoM
th
Frequency of maximum FFT amplitude (similar to FMXA) of x time segment
Tx_Avg
RMS/AVG FFT amplitudes of time segment x
04-2017 file: amsy-6_opman.docm 119 of 149
AMSY-6 Operation Manual
Tx_SRY
Spectral ratio of FFT amplitudes of time segment x and frequency band Y.
A detailed description is available in the online help system.
13.9 Classifier Results
Class: Class number (Result Class in VisualClass report file)
The number refers to a prototype file or cluster in feature space. Each prototype file or cluster is
assigned a unique class number. In the report file, the name of the prototype class is referenced
to each signal.
DST1: Distance Ratio (DST-Ratio in VisualClass report file)
The distance ratio for each data set is the normalized distance from the center of all prototype
data sets to each specific data set. The normalization constant is the furthest distance of all
prototypes to the center. This choice of normalization means that the worst fit of the prototype
data has a Distance ratio of 1.
Distance ratio is a measure of how well a signal fits to its assigned class relative to other signals
in the same class.
DST2: Hit Ratio (Hit-Ratio in VisualClass report file)
Hit ratio is the distance a signal is from the center of the class it has been assigned to divided by
the distance to the center of the second best class fit. By definition, a hit must be closer to its
class than its second best fit, so the maximum value for Hit ratio must be less than 1. A signal
that is in the center of its class would have a Hit ratio of zero.
Note: The Hit ratio is a measure of how well each signal fits to its assigned class relative to
other classes.
DST3: Off Ratio (Off-Ratio in VisualClass report file)
Off ratio is the distance a signal is from the center of its class divided by the average distance
the signal is from all other classes. Limits for Off ratio are the same as for Hit ratio, however
normally the Off ratio must be much smaller than the Hit ratio.
The Off ratio is a measure of how representative a classifier is for each signal it analyzes.
04-2017 file: amsy-6_opman.docm 120 of 149
AMSY-6 Operation Manual
14 Accessing and exporting measurement data
Primary data (i.e. AE-feature data) and transient data (i.e. samples of a burst) are stored to files
that comply with the SQLite3 standard. Data in these files can be accessed by every application
that supports a SQLite3 interface. This is the easiest and most convenient way to access and
export data in an automated manner.
Extensive documentation can be found in the online help of the Vallen AE-Suite software,
chapter Data Acquisition Acquisition Files and subtopics contained herein.
There are also manual ways of exporting data from VisualAE. These are documented in the
subsequent sections. The software module VAE2 is required to enable these data export
capabilities. This software module is part of the basic software since R2012.0508.
Numerical Listing of AE-Data
A listing displays information from various data set types from the primary data files: AE-hits,
parametric data, and status data. This display can be exported to a file or to the clipboard.
1. In VisualAE, put the listing behind the desired processors (e.g. location, filter…)
2. Choose the desired start and end criteria in the ‘project settings’
3. In the listing ‘Properties’, tab ‘Attributes’ select the data (columns) you to display and export
4. Now click on Reset + Run
5. Make a right mouse click on the listing, select ‘Copy’ and then which type of export you
want (ASCII file to clipboard or HDD, bitmap, directly to printer…) and follow the
instructions.
Statistics from AE-Data Displays
VisualAE diagram content can be exported as ASCII text or bitmap
1. In VisualAE, put the desired diagram behind the required processors (e.g. location, filter…)
2. Choose the desired start and end criteria in the ‘project settings’.
3. Now click on Reset + Run
4. make a right mouse click on the diagram, select ‘Copy’ and then which type of export you
want ASCII file to clipboard or HDD, bitmap) and follow the instructions.
If an external data set is to be correlated with the AE data set, a synchronization point is very
useful. A singular event (such as any simulated AE) that also registers on the other
measurement device can serve this purpose. The time of this data set can be used as a
reference on the AE-data.
Exporting TR-Data Sets
Individually exporting single transients is done via export to Clipboard from any waveform
diagram.
1. When the desired signal is displayed, the Copy: ASCII to clipboard function is used. (point
at the diagram, right click, select "Copy" and "ASCII to Clipboard")
04-2017 file: amsy-6_opman.docm 121 of 149
AMSY-6 Operation Manual
2. Clipboard data can be directly pasted into other programs as (Word, Excel...)
Direct access to TR-data file
In the past the software module XTR was required for direct access to transient data file. XTR is
deprecated since SQLite3 file format has been introduced. It can still be used. See XTR
documentation for more details.
Automated export of AE-data
AE feature data can be exported automatically by using file i/o operations of the Embedded
Code Processor (ECP). This requires the ECP programmer module.
04-2017 file: amsy-6_opman.docm 122 of 149
AMSY-6 Operation Manual
15 Reporting analysis results
At the end of each data analysis task a report has to be created. This part of work, the
representation of results, can be quite time consuming. VisualAE offers numerous features for
the generation of perfectly looking reports in a minimum of time.
15.1 Exporting Diagrams
Complete VisualAE-pages can be exported to clipboard (if the corresponding option is enabled)
and transferred to your word processor or saved to file. Optional packages are available that
include tools to copy only an individual AE-Visual. Powerful tools for adjusting the appearance
of the graphs, such as the resolution, the inclusion of certain legends, and more, are included.
15.2 Printing
Creating hardcopies directly from VisualAE is simple and convenient. Any Windows-supported
printer can be used. A dialog window offers a printer-preview and many possibilities for
adjusting the appearance of the printed page (landscape or portrait, size, position on page,...).
The above mentioned details do not completely describe all features of VisualAE. The target of
this description is to enable you to find your way through VisualAE, learn its use and get
confident in a minimum of time. VisualAE is supported by extensive, context sensitive help texts.
You can also quickly find information of interest over the help text's list of contents and index.
04-2017 file: amsy-6_opman.docm 123 of 149
AMSY-6 Operation Manual
16 Alarm Manager
The Vallen AE Suite Software includes an Alarm system which monitors runtime status of
hardware and software, system resources and user defined conditions. It can be configured to
execute tasks if it evaluates monitoring conditions to be true. All monitoring conditions are
evaluated in online – as well as offline mode.
The Alarm system consists of three logical components:
• Evaluators: an Evaluator is the front-end that monitors if a monitoring condition is met. The
result of a monitoring condition defines the evaluation state of its Evaluator.
• Actions: An Action defines a task that is executed when the Action is invoked.
• Signals: A Signal is an interface between Evaluators and Actions. A Signal is triggered by
an Evaluator and processes the evaluation state of it. Depending on its own Signal state it
may invoke Actions assigned to it.
The software component that implements Evaluators, Signals and Actions is the Alarm
Manager. The Alarm Manager provides a graphical user interface for managing and setting up
Actions and Signals. The Alarm Manager implements some predefined Evaluators called
Watchdogs and provides an interface to external Evaluators such as Alarm Processors in
VisualAE.
Additionally the Alarm Manager creates and updates a log file. The location of the log file is
c:\vallen\log\alman.txt
16.1 Evaluators
Evaluators are the front-end of the Alarm system. An Evaluator defines a monitoring condition
consisting of two independent OR linked conditions. One of these conditions is responsible for
triggering warnings, the other one for triggering alarms. Depending on the result of these two
conditions an Evaluator has three evaluation states:
• NULL: warning – and alarm condition evaluate false
• Warning: warning conditions evaluates true
• Alarm: alarm condition evaluates true. Alarm evaluation state will always override Warning
evaluation state.
Whenever the monitoring condition is evaluated true, the Evaluator triggers the Signal which is
connected to it.
Pre-defined Evaluators are called Watchdogs. Currently, nine Watchdogs are implemented.
Limits of a Watchdog’s monitoring conditions can be changed by the user any time. Watchdogs
and their monitoring condition can be accessed from within the Alarm Manager.
User defined Evaluators are called Alarm Processors (see section 8.10). Alarm Processors are
only available in VisualAE. An Alarm Processor is fully configurable by a user.
The Alarm Processor has two tabs for setup called Alarm and Comment. Use the Alarm tab for
setting up monitoring condition. Comment tab can be used to give Alarm Processor a
meaningful name (Title field) for referencing it in the Data Processing Structure. Furthermore
Comment field can be used for specific information which will be written to log file if the Alarm
Processor triggers its Signal.
04-2017 file: amsy-6_opman.docm 124 of 149
AMSY-6 Operation Manual
16.2 Actions
Actions are the back-end of the Alarm system. An Action defines a task which is executed if the
Action is invoked. Currently there are seven Action types which can be configured by the user:
• Sound Action: plays back a sound file. The sound file can be any WAV or MP3 file.
• Simple Beep Action: activates the beep of a system. It is primarily intended for systems
without a sound card, where the system beeper is used instead. This service is provided by
the operating system.
• Remote Network Message Action: works like the net send command at the command
prompt. It only works on a Windows NT based system (2000, XP, Win 7) within a network.
Setup of RNM requires specifying the target name of the recipient of messages.
• E-Mail Notification Action: sends an e-mail to a certain address over an SMTP host server
using its internal SMTP client. The SMTP client must be configured by the user. Setting up
this Action requires knowledge of SMTP host server name or address, login and password
to SMTP server and authentication method.
• AMSY-6/-5 Led Action: controls the available LEDs on AMSY-6/-5 hardware (SP0, SP1,
Warning, Alarm). This Action is only available when Acquisition program is running because
only Acquisition has access to LEDs in the chassis.
• Custom-Action Action: Custom Action uses the ActiveX component
VallenSignalSrv.AlExternalAction. It completely integrates into the Vallen Alarm Manager's
design. This Action type allows a user to define any type of response by providing a
software interface to the Alarm Manager. This software interface offers a programmer the
possibility to create his own response code. This feature is implemented by a Custom
Action that is handled like other Actions in the Alarm Manager, but exposes its specific
behavior through a COM interface.
• Shell Command Action: this Action type offers a user the possibility to execute a shell
command. This can be used to start up a script or program executing user specific code.
Actions are configured and setup by the use of the Alarm Manager. Every Action accepts and
interprets two basic commands:
• Execute: executes the task defined for the Action.
• Stop: stop execution of the task defined for the Action. Some Actions stop automatically
once they have been executed, e.g. such as E-Mail Notification Action. Other Actions
require a Stop command in order to stop execution, e.g. such as Sound Action. A Stop
command may also be necessary or useful in case of Custom Actions.
Furthermore a Custom Action can also process following commands:
• Reset: A Reset command propagates from the Alarm Processor (if analysis is reset) via the
Signal to a Custom Action. It indicates that analysis in VisualAE has been reset. Prior to a
Reset command a Stop command is issued.
• State Changed: a State Changed command is issued to the External Action whenever its
Signal changes its state (see below for Signal states).
16.3 Signals
A Signal is the interface between Evaluators and Actions. At the input side a Signal is
connected to an Evaluator. At the output side a number of Actions can be connected to a
04-2017 file: amsy-6_opman.docm 125 of 149
AMSY-6 Operation Manual
Signal. Connected Actions are divided into two categories: Warning and Alarm. Actions are
assigned to either of the two categories by the use of the Alarm Manager.
Watchdogs have their own pre-defined Signals. Alarm Processors must be manually assigned
to any of up to 10 Signals, whereby more than one Alarm Processor can share the same Signal.
A Signal has some internal logical components since it maps an arbitrary number of Evaluator
inputs and user interactions to six Signal states:
• Disabled: Signal output is disabled. The result yielded by a monitoring condition of any
connected Evaluator is ignored. Actions connected to the Signal are never invoked
• Armed: Signal output is enabled. Prior to enabling Signal output a Stop command is issued
to all connected Actions.
• Warning Active: a trigger state changed from NULL to warning of one of the connected
Evaluators. The Signal will output an Execute command to the Actions assigned to its
Warning category.
• Warning Confirmed: Warning Active state was acknowledged by the user. The Signal will
output a Stop command to its Actions. The Signal will not issue any more Execute
commands to the Actions in its Warning category.
• Alarm Active: one of the trigger states of a connected Evaluator changed from Warning to
Alarm or NULL to Alarm. The Signal issues an Execute command to the Actions of its
Alarm category. If the Signal’s previous state was the Warning Active state a transition to
Alarm Active state includes a preceding automatic transition to Warning Confirmed state.
• Alarm Confirmed: Alarm Active state was acknowledged by the user. The Signal will output
a Stop command to its Action. The Signal will not issue any more Execute commands to its
Actions until state of Signal is changed to Armed.
Signals are non-blocking avoiding all possible deadlocks situations in the unlikely case that
either analysis- or acquisition applications run into a fatal error condition.
When VisualAE is reset all Signals are set to state Armed.
16.4 Interaction of Alarm system components
Communication between Evaluators, Signals and Actions is one way. Information is fired by
Evaluators, processed by Signals and finally Actions receive commands from Signals. As
mentioned before, the Alarm Manager is only the framework for these components offering a
user a possibility to interact with the Alarm system.
During operation, i.e. data analysis, a user can manually change the state of a Signal in the
Alarm Manager from
• Warning- or Alarm Active to Armed or to Disabled or to Warning- / Alarm Confirmed,
• Warning- or Alarm Confirmed to Armed or to Disabled and
• Armed to Disabled or vice versa.
However this information is not relayed to the connected Evaluators, only connected Actions
receive a Stop command.
16.4.1 Interaction between Evaluators, Signals, Actions and user interaction
Consider following example: an Alarm Processor has an alarm condition that evaluates true
when at least three hits had amplitude larger than 90dBAE. During analysis of data three hits
separated by low amplitude hits are measured with peak amplitude exceeding 90dBAE. After the
04-2017 file: amsy-6_opman.docm 126 of 149
AMSY-6 Operation Manual
third hit has been processed by the Alarm Processor it changes its evaluation state to Alarm.
The Signal connected to the Alarm Processor is triggered and processes the evaluation state
information. It changes its state from Armed to Alarm Active. All Actions connected to the
Signal’s Alarm category are executed.
The operator in front of the equipment is notified and wants to confirm the Alarm. He changes to
Alarm Manager and manually confirms the alarm. The Signal state changes from Alarm Active
to Alarm Confirmed. After that a fourth hit is measured with peak amplitude larger than 90dBAE.
The Evaluator triggers the Signal it is connected to again. Since the Signal is in Alarm
Confirmed state no Actions are executed.
The operator decides to rearm the Signal, i.e. change its state from Alarm Confirmed to Armed.
After a while a fifth hit is measured with amplitude exceeding 90dBAE. Even though it is the first
hit after rearming the Signal, the alarm condition of the Evaluator yields true since for the
Evaluator it is the fifth hit with an amplitude exceeding 90dBAE. The Evaluator triggers the Signal
it is connected to. Since Signal is in Armed state it changes to Alarm Active state and sends an
Execute Command to all connected Actions of Alarm category. Because of the one way
communication the Signal state transition from Alarm Confirmed to Armed has no effect on (i.e.
does not reset) the Alarm Processor/Evaluator. Only resetting Analysis in VisualAE will also
reset evaluation state of Alarm Processors.
16.4.2 Log file
Alarm Manager creates and updates a log file. A log file is updated whenever an Evaluator
triggers a Signal. While the Alarm Manager makes Log file entries it is triggered by the Signal
itself.
The Alarm Manager can only read out the Signal’s state but cannot gather information from the
Signal about the Evaluator and why it triggered simply because the Signal does not get this kind
of information from an Evaluator. Instead an Evaluator writes this kind of data to a shared
register via Windows message service. The Alarm Manager reads out this register and writes
the information to log file. The information contains the DSET number which caused the Alarm
Processor to trigger, the information specified by the user in the Alarm Processor’s comment
field and the monitoring condition which was met.
The Alarm Processor triggers a Signal and writes data to a shared register whenever a
monitoring condition evaluates true. If there are e.g. five consecutive hits meeting a monitoring
condition the Alarm Processor sequentially writes the DSET number and monitoring condition to
this register, always overwriting the previous one.
There is a collision detection preventing the Alarm Manager from reading out any information
while the Alarm Processor writes or updates the shared register.
For various reasons the Alarm Manager might not catch or read out the information of the hit
that caused a Warning or Alarm first. This may be due to
• Consecutive hits cause the Alarm Processor to update and therefore lock the shared
register.
• It takes some time (in the order of ms) for the information to propagate from an Alarm
Processor to the Signal and the Alarm Manager that a log entry is required. In this time
another hit may have occurred meeting a monitoring condition.
The Alarm System was designed and intended to be used by an operator and not for
automation routines or for logging purposes. Since the reaction time of an operator is within
seconds, the accuracy achieved with this approach was sufficient.
04-2017 file: amsy-6_opman.docm 127 of 149
AMSY-6 Operation Manual
17 Introduction to VisualTR
VisualTR is an analysis tool for transients enabling the display of transients and their FFT. It can
be used online (during data acquisition) and in offline analysis.
During data acquisition, VisualTR is connected to the acquisition program via the Vallen-
Systeme Scheduler which allows an immediate application of all the powerful tools to online-
data.
Figure 30: VisualTR window showing one page with three TR-diagrams each having a client
window
VisualTR offers TR-Diagrams, TR-Pages and TRWindows. The TR-Diagram shows one
waveform in time and/or frequency domain. Any data set of the selected TR-file can be shown in
any TR-Diagram. Each diagram can independently scale, scroll, zoom, split into a time and a
frequency graph, be copied (ASCII or graphical bitmap format) to any other Windows application
via clipboard, and more.
Several diagrams can be grouped into a TR-Page. TR-Pages are groups of TR-diagrams, ideal
for arranging signals for contrast, presentation and/or printout. For each page a header and a
bottom text can be edited and printed. Several pages can be set-up. Tabs are provided for the
easy selection of a page by a single mouse click.
Several pages can be grouped into a TR-Window. TR-Windows contain one or several pages
showing waveforms of the same file. To compare waveforms from different files, more than one
TR-Window can be simultaneously active in VisualTR.
This hierarchy lets the user conveniently compare waveforms of, e.g.:
04-2017 file: amsy-6_opman.docm 128 of 149
AMSY-6 Operation Manual
• different hits of the same event
• first-hits of different events
• hits of different tests (stored on different files)
• different kind of displays of the same hit
A TR-Diagram can be used to display any waveform of the file selected by set number, TR-
index (TRAI) or by next/previous buttons. The TR diagram can be configured to show the
waveform or the frequency domain. Additionally a TR client can be opened in a diagram
showing for example the frequency domain next to the transient in the parent window.
Spectra can be displayed in linear or logarithmic
scale in a user defined frequency range. Spectra
are obtained by choosing an appropriate window
function such as: Rectangle, Hamming, Hanning,
Welch, Bartlett, Trapezium window (see image to
the right).
Additionally a digital frequency filtering can be
applied with user defined cut-off frequencies and
steepness.
The envelopes of different frequencies obtained
from Gaussian cross-correlations (plate mode
analysis can be overlaid onto the transient
diagram).
Figure 31: example of Gaussian cross-correlation
04-2017 file: amsy-6_opman.docm 129 of 149
AMSY-6 Operation Manual
17.1 Example: a closer look at thresholds
The first threshold crossing is commonly used as
definition for the signal’s arrival time at the sensor.
This point of time together with the material’s
appropriate speed of sound is used for calculating
the location of an event. The threshold should be
selected carefully by the operator. As shown in
image to the right an increase of the threshold from
50 to 65μV would cause a change in the arrival
time of approximately 35μsec (@18cm difference
in location!). VisualTR is a helpful tool e.g. in
explaining why location results sometimes differ
from expectations.
17.2 Tools of VisualTR
17.2.1 Filtering of Transient Recorder Data
Since the selection of the interesting signals is a very important requirement when transient
recorder data are to be analyzed, various TR-filter possibilities have been implemented in the
AMSY-6 software:
The front-end filter rejects data according to the selected criteria before they are transferred and
stored (e.g. if the AE data of the hit does not exceed selected minimum peak amplitude or the
minimum duration).
The user can generate a correlation plot in VisualAE that contains the TRAI of filtered AE data.
A utility (belongs to optional VisualTR) can then be used to copy only TR data belonging to the
TRAI(s) of such a plot.
The following items are only available with the optional VisualTR package:
TR-Combi, TR-Copy, TR-Indexer
These Windows programs are utilities to copy selected TR data from one file to other file(s) and
to renumber the TR-Index, where needed. They support the efficient generation of learning
databases for signal classification by VisualClass.
TR-Filter, TR-Unifier
TR-Filter allows one to apply a digital (software) filter to already recorded data and store the
result. Thereby TR-data recorded with different hardware filters can be unified.
TR-Unifier is a tool to change sample rate and page length (number of samples per waveform)
after recording. This is very useful if data acquired with different settings shall be analyzed with
VisualClass.
17.2.2 FFT Averager
This application calculates and displays the average spectrum of all waveforms in a TRA file.
From all FFTs, for each frequency bin, 3 averaging methods are calculated and shown in 3
curves:
• RMS: Root mean square, result converted to dB above 1 µVRMS
04-2017 file: amsy-6_opman.docm 130 of 149
AMSY-6 Operation Manual
• AVG:Mean value of all bins, result converted to dB above 1µVAVG
• AVG[dB]: Mean value of all bins, converted to dB above 1µV prior to averaging, and a
• curve RMS subtracted by AGV[dB]. This curve gives an indication which frequencies are
equally distributed on the analysed data, (difference is very small) and, vice versa, at which
frequencies the waveforms differ.
This application is useful for discovering the lowest level spectral compositions out of the white
noise. Additionally spectrum reduced by white noise level pronounces other spectral
components.
17.3 Reporting in VisualTR
Implemented in VisualTR is a powerful printing functionality. From anywhere in the software you
can access it by simply pressing F2.Then you may select details such as the orientation
(portrait/landscape), position and/or size on the printer page.
VisualTR also has a powerful copy to clipboard tool. It provides easy export of a complete page
or only one selected TR-diagram in any desired pixel resolution, with or without header/legend
texts to the windows clipboard. In a similar manner any waveform can be exported in ASCII
format, e.g. for user-programmed signal processing.
04-2017 file: amsy-6_opman.docm 131 of 149
AMSY-6 Operation Manual
18 Introduction to Vallen TR-Feature Extractor
Vallen TR-Feature Extractor is a tool that extracts features from frequency domain and transient
data and writes them to a feature file (file extension: trf). VisualAE automatically uses a feature
file if it detects one in the same folder with same file name as the primary data file. Frequency
domain- and transient data features are then handled like AE features (hit data), which means
they can be plotted, listed, or used for filtering.
Vallen TR-Feature Extractor includes FFT Feature
Extractor, Classifier (if VisualClass is part of your
KeyFile) and Spectral Ratio Extractor.
FFT Feature Extractor
FFT Feature Extractor is the simplest way of extracting features from frequency domain. The
following results are extracted: Center of gravity of the frequency spectrum (FCOG), and
frequency of the spectrums’ maximum (FMXA).
Classifier
Classifier provides an interface for employing a VisualClass classifier to transient data.
Spectral Ratio Extractor
Spectral Ratio Extractor divides transients in time segments which can be overlapping. Each
time segment is transformed into frequency domain. A frequency domain can be divided into a
maximum of 5 segments. For each frequency segment average amplitude of FFT is calculated
(AFxy). This feature is the basis for Spectral Ratios. It can be compared against
• An absolute value of 1µV which in fact yields just the average FFT amplitude of considered
time-frequency segment.
• Average amplitude of first time segment
• Average amplitude of time segment which is considered for calculating spectral ratio.
• AverageFFT- amplitude of frequency segment 1 in time segment 1
Next to aforementioned features, Spectral Ratio Extractor can also yield peak amplitude, rise
time, duration, counts to peak, initiation- and reverberation frequency of stored transients.
Peak amplitude, rise time and duration may differ compared to extracted AE-features if AE-
signal is longer than TR-page.
04-2017 file: amsy-6_opman.docm 132 of 149
AMSY-6 Operation Manual
18.1 FFT Feature Extractor
The FFT Feature Extractor is the simplest plugin to the Vallen TR-Feature Extractor. It yields
two results and writes these to a feature file. The results are
• FCOG: frequency center of gravity or median frequency. FCOG is the frequency which
divides the spectrum in a lower- and upper part and energy of lower part equals energy of
upper part.
• FMXA: peak frequency of spectrum.
The FFT Feature Extractor has only few setup
parameters. The “Extraction settings” group
governs from what part of the waveform features
are extracted. The group “Special Settings”
contains parameters that condition the results. A
description of the set-up parameters follows below.
Extraction Settings: start sample relative to trigger sample
This setting defines the start of the extraction window. Usually transient recording is set-up with
some pre trigger samples. “0” refers to the trigger sample, i.e. the sample that caused the first
threshold crossing. A negative offset shifts the extraction window to the “left”, into the region of
pre trigger samples. A positive offset shifts the extraction window to the “right”.
Extraction Settings: No. of samples for extraction window
This parameter defines the length / width of the extraction window. A window of type Hamming
is applied.
Extraction Settings: No. of samples for FFT calculation
This setting governs the size of the window for which FFT is calculated. The number of samples
in this window is always a power of 2: 128, 256, 512, 1024, 2048, 4096 and so on. Any powers
of two smaller than the number of samples of the extraction window cannot be chosen and are
not displayed. Remaining samples, which corresponds to the difference of number of samples
for FFT calculation to number of samples of extraction window, are padded with 0.
Special Settings: Cut-off limits
It is recommended to use cut-off limits in order that results for FCOG are not biased towards
higher frequencies because of high frequency noise that appears in FFT.
In case of 10MHz sampling rate of TR-data, the maximum resolvable frequency in FFT is 5MHz.
Usually an AE- measurement is conducted in the frequency range below 850kHz. With a filter
roll-off of 48dB per octave, the contribution of high frequency noise to the AE-signal is minimal.
Nevertheless, high frequency noise, an artifact of the FFT, may bias the result of FCOG towards
higher frequencies. Cut-off limits avoid this by neglecting FFT amplitude less a certain
threshold.
Cut-off magnitude in [µV]
Cut off magnitude in [µV] defines a fixed cut-off. Any amplitude in FFT below this cut-off limit is
disregarded for calculating FCOG.
04-2017 file: amsy-6_opman.docm 133 of 149
AMSY-6 Operation Manual
Cut-off magnitude in percent of maximum
This parameter specifies a “floating” cut-off limit based on the peak amplitude of the spectrum.
04-2017 file: amsy-6_opman.docm 134 of 149
AMSY-6 Operation Manual
19 Introduction to VisualClass
New, faster and better transient recorders generate large amounts of waveform data. Evaluating
large numbers of waveforms by analyzing each single waveform, searching for similarities or
differences is a time consuming task. VisualClass is a tool for statistical analysis which groups
data based on similarities in the frequency domain.
VisualClass can be used to develop a classifier that assigns each waveform to one of several
classes, each with its own class number. The classifier (the rule how waveforms are assigned to
the classes) is the result of the learning process that considers a number of prototype data. The
prototype data have either been manually selected by the user (supervised learning) or
automatically found by a clustering process (unsupervised learning) of VisualClass.
Further infor¬mation, such as how well a waveform fits into the assigned class, is also
generated in the form of distance-ratios. All these classifier results can be linked to the
corresponding hit-data in the Vallen VisualAE™ program. Hence, the classifier results can be
statistically processed, graphically or numerically displayed or used for filtering like a traditional
AE feature.
The two diagrams below (figure 32) show the combination of VisualClass results with the
traditional AE features. The upper diagram shows the class (number) versus the time of the
corresponding hit. The lower graph shows the distance-ratio that indicates how well a waveform
fits into the assigned class. The lower the distance-ratio the better the transient fits into the
class.
figure 32: VisualClass results used in VisualAE diagrams.
04-2017 file: amsy-6_opman.docm 135 of 149
AMSY-6 Operation Manual
19.1 Inside VisualClass
VisualClass analyzes short time frequency spectra. The waveform in the upper graph has been
subdivided into 5 overlapping time segments as indicated by the five differently colored
horizontal bars at the top and bottom of the waveform. Each time segment is processed by a
Hamming window to avoid abrupt window edges. Each of the five waveforms in the middle row
of graphs represent one of the five Hamming-windowed time segments. For each time segment,
the FFT is calculated and shown in the lower row of graphs.
Depending on user-adjustable parameters, such as the number of time segments, samples per
time segment, frequency range of interest, and others, VisualClass uses the resulting number of
spectrum amplitudes as features for the differentiation of the waveforms. Hundreds of features
can be used simply by specifying these extraction parameters.
VisualClass helps to select the
features of best separation power by
displaying the Fisher Ratios over all
classes as well as over each pair of
classes. The two graphs on the right
show Fisher Ratio plots. The dots in
red are considered by the classifier
currently under development.
Features can be selected by mouse
clicks directly on these dots, or by
automated strategies
One of the impressive features of VisualClass is its capability to visualize the separation of
classes in so-called feature-feature projection plots.
04-2017 file: amsy-6_opman.docm 136 of 149
AMSY-6 Operation Manual
The graph above shows one symbol
per waveform. The color and form of
the symbol identifies the class it
belongs to. The symbols are mixed
and the classes cannot efficiently be
separated. After a transformation of
the original feature space into a
transformed space with an optimum
point of view, VisualClass achieves an
extremely powerful separation as the
transformed feature-feature projection
plot below demonstrates
All symbols belonging to the same
class are now close together and well
separated from the symbols of other
classes. This shows the efficiency of
VisualClass in recognizing similarities
and differences in AE- waveforms.
The power of VisualClass is based on two points: Its visual transparency and its extensive
automated processing. For each step of the classifier development process VisualClass offers
tools which automatically optimize the results.
When starting a classification, pre-selected prototype data for each class is normally not
available. Sometimes it is not even known how many classes might be separable in one
transient data file. Finding qualified prototype signals out of the data manually is in most cases a
very difficult and time consuming task. VisualClass supports you with its unsupervised learning
strategies:
• Feed a convenient part of your transient data file into VisualClass and specify the feature
extraction parameters for the signals. VisualClass will automatically analyze this data and
search for similarities among the signals. If a set of similar signals is found, then these
signals are collected in a cluster. Frequently, more than one solution can be found and
VisualClass shows all cluster combinations that could be detected in the data.
• All cluster combinations are stored. The user can easily pick out one cluster combination
consisting of several clusters and handle these clusters like pre-defined prototype data.
Now all mentioned methods can be used on these classes to train a classifier.
• When the classifier is built, it can be run on any other transient data file. VisualAE™ can
filter signals out of unknown data which match the classes the closest. With the provided
utility programs these signals can easily be added to the prototype data of the
corresponding classes.
• On the other hand, data can be filtered to identify the waveforms that are furthest from all
classes. These signals can be selected to create a new class. This makes the prototype
data step by step more and more representative for all kind of signals to be expected in
your special Acoustic Emission application.
04-2017 file: amsy-6_opman.docm 137 of 149
AMSY-6 Operation Manual
20 Guide to good AE-measurement practice
20.1 Step 1: Equipment verification
Verification of the AE-measurement equipment should be done on regular basis. Verification
ensures that equipment is working according to specification. Next to checking the ASIP-2
channels, the AE-sensors, stand-alone preamplifiers, the chassis one must also check the
cables or the sensor’s hold down device. Vallen Systeme provides tools for the AE-system
verification.
20.1.1 ASIP-2 channel - and chassis verification
Vallen Systeme provides dedicated software (see section 21.1) for the task of AE-channel - and
chassis verification. Additional hardware such as an arbitrary function generator and a DC
calibrator is needed. The SysVeri software guides through a semi-automated system verification
according to the requirements of the EN 13477-2.
At the end of the verification procedure a report with detailed results is generated.
20.1.2 Verification of sensitivity of sensors
AE-sensors should be verified on regular basis if their sensitivity is still sufficient. Vallen
Systeme provides the Vallen Sensor Tester package for this task (for more information see the
separate document Acoustic Emission Accessories).
20.1.3 Common Mode test for AE-sensors
AE-sensors may become susceptible to HF noise injected over air. A special setup of the Vallen
Sensor tester can be used to test the HF rejection behavior (called common mode test).
20.2 Step 2: Mounting sensors and mounting verification
Since sensors and their mounting are the most important part in setting up a measurement
great care has to be taken doing this correctly. First of all only suitable sensors and sensors in
good order should be used. Mounting the sensors firmly and steadily is the key to good data
acquisition results. Finally the sensor mounting quality has to be verified for each sensor in
order to be sure the setup was done correctly.
20.3 Step 3: Conducting a noise test
A noise test prior to the AE-test should allow a better understanding of the noise level in the test
object.
20.3.1 Noise – a definition
A hit is the measured response to an AE-source which is of interest for the AE-test. Noise, in
contrast to the hit, is any process or phenomenon that can mask out or be mistaken for a hit. To
highlight specifics in the contrast between hit and noise, the following terms will be used here:
• Hit(s) will imply discrete signals related to the measurement goal.
04-2017 file: amsy-6_opman.docm 138 of 149
AMSY-6 Operation Manual
• Noise-in-signals will imply any effect which reduces the resolution of the hit signal
measurement.
• False-signals are used to describe discrete data that is not related to the effect being
measured.
Related to noise is an interference effect that may tend to cause misinterpretation (masking) of
hits. Noise filtering has no effect on interferences/disturbances coming from:
• Hit-cascades: Hit-on-hit interference or signal overlap
• Event-in-event interference: coincidence of two AE-sources that overlap.
20.3.2 Goals of noise reduction
The goals of noise reduction will seek to meet one or more of the following issues:
• Limit false-hits
• Limit measurement inaccuracies (due to background noise in signals)
• Limit hit/event overlapping
• Preserve distinct aspects of hits and noise which can distinguish them
20.3.3 Noise effecting signals
High signal-to-noise often gives a quality factor for a measurement system. Continuous
background noise in AE is measured by rms. Because in AE thresholds are used for both hit
detection and certain measurement quantities threshold level considerations are very important.
Measured quantities for many AE parameters depend on detection level, especially counts and
duration. Thresholds well above background levels will reduce the risk of undue threshold
influence. High thresholds naturally provide poor sensitivity and signals that remain near the
threshold will be dominated more by the signals related to the threshold than the signal itself.
Ideally, one would like both the ratio of threshold-to-noise and signal-to-threshold to be greater
than 10.
It is also desired to have the same threshold for all tests to maintain the compatibility of test
results, therefore certain tests usually have specific thresholds (most materials: 40 dBAE,
composites with high AE activity rates: 55 dBAE, quiet materials: 30 dBAE).
20.3.4 AE-signal and event interference
The problems of event interference can occur on three levels:
1. overlapping of arrivals and reflections,
2. overlapping of independent but coincident hits and
3. overlapping of independent coincident events
The first problem may occur more often when the event lifetime in a structure is long compared
with the time needed to travel across the structure. The second and third problem is related. A
saturation limit can be calculated when event lifetime corresponds to the reciprocal of event
rate. Measurable overlapping becomes significant, when these two parameters are within only
several orders of magnitudes from one another.
04-2017 file: amsy-6_opman.docm 139 of 149
AMSY-6 Operation Manual
20.3.5 Measuring noise
To conduct a noise test, simply set the detection threshold to a low value, e.g. 22-24dBAE. With
this threshold setting conduct a measurement for 5 to 10 minutes. The measured peak
amplitude (Anoise) is an indication of maximum noise amplitude in test object. Detection threshold
(Adet) for the test should be well above Anoise.
Adet = Anoise + X
A value of 6dB for X is useful.
20.3.6 Strategy to reduce noise
The strategy for noise prevention depends on categorizing noise characteristics, noting the
common side effects of each category and setting up priorities based on these noise prevention
methods.
Separation parameters for AE signals and noise fall into these categories:
1. Environment (requiring shielding)
2. Frequency and amplitude range of burst
3. Continuos signal information, i.e. RMS
4. Spatial extent (i.e. location results)
5. Time or parameter based occurrence
6. AE signal characteristics.
The classification of any AE source as noise (disturbance to measurement) or hit (valuable
information) depends on the test goal. A hit may be the measurement goal in one application
but regarded as noise in another application. A rough list of sources and separation indicators
can be found in table 3.
Environ Freq./ Loc. Time Param. AE signal
-ment Amp
Burst Cont.
Active Defects o x o x
Leaks x x x o x
"Machinery" x x
Rubbing x o o o o x
Electrical x x x x
Impact x o x
Vibration x x
Cavitation x o
Table 3: distinguishing characteristics of some common noise sources (x…stronger indicator;
o…weaker indicator).
Specific examples of sources in table 3 are:
• Active defects: cracks
• Leaks: valves and fluid flow
04-2017 file: amsy-6_opman.docm 140 of 149
AMSY-6 Operation Manual
• Machinery: rotational vibrations
• Rubbing: contact joints, slippage
• Electrical: EMI, RF
• Impact: rain, wind blown dust
• Vibration: traffic
• Cavitations within turbulent flow
The strategy for dealing with noise is presented in list below. The basis of this strategy is simple;
any measure that isolates noise from AE signals (shielding the AE signals) is preferred over any
method which filters it. This is because filtering has undesired effects that include accumulating
unwanted data, increasing the risk of hit-cascades (hit-on-hit interference) and event-on-event
interference and decreasing the measurement accuracy of the system. Following list of
measures against noise is ordered according to priority (top priority stated first).
1. Isolate (or shield) the test environment from the noise environment.
2. Change measurement settings:
a) frequency range of sensor and system
b) threshold level or type (fixed, floating)
3. Use location range or guard sensors
4. Discriminate AE signals from noise signals (AE parameter characteristics, external
parameter characteristics, pattern recognition) by filtering them
a) online analysis
b) post analysis
5. Cut out time periods in which external caused AE is observed
20.3.7 Specific measures against noise
Methods in Environment Shielding/Isolating signal from noise
Use dedicated equipment Equipment designed for AE typically isolates the
measurement chain from electrical noise much better than
general use equipment.
Proper grounding of Make sure that AMSY-6 is properly grounded via power
measurement chain outlet or ground socket at rear panel and grounding rod.
Electrical isolation of It is important to have AE-sensor and measurement chain
measurement chain and test (e.g. external preamplifier) electrically isolated against test
object object. When using magnetic holders make sure they are
isolated.
Use appropriate cables All cables in use should be in a good condition. Completely
shielding off cables against EMI is usually not possible.
Damaged cables and connectors are more prone to EMI.
Therefore cables should be protected against bending and
mechanical strain.
Double shielded cables can attenuate EMI influences by
40dB or more. Short cables are less susceptible to EMI.
04-2017 file: amsy-6_opman.docm 141 of 149
AMSY-6 Operation Manual
Fasten loose cables and Loose cables (e.g. cables connecting sensor to preamplifier
parts. or preamplifier to ASIP-2) or parts in contact with test object
may introduce noise. All cables running from test object
should be securely locked down.
Isolate pumps In pressurized tests, the pump can be separated from the
vessel with an accumulator, which can be effective in
isolating flow and vibration noise from the test vessel.
Isolate surfaces in free Add soft material (i.e. Teflon) between rubbing surfaces.
contact Metal on metal rubbing tends to make a lot of noise, metal-
on-tape, for instance, makes very little noise.
Select appropriate grips for In material testing, the grips will need to exert a force on the
laboratory testing material which is susceptible to sliding, damaging the
specimen during testing and crushing of any material which
may collect on the grip faces. A layer of soft material on the
grip face (Teflon) or an interface adhered to the specimen
(aluminum tabs) where the grips attach to the specimen can
both damp noises.
Selecting grip type A constant force grip (such as pin grips and hydraulic grips)
will tend to concentrate noise at the time of gripping and
perhaps at very early loading. Grips which increase force with
loading (wedge grips) can produce noise throughout the test.
This allows the additional advantage of using parameteric
means to damp noise. In pin grips, oil can be used to reduce
fretting.
Selecting load application in Older screw driven machines produce less noise than more
laboratory testing modern machines (as hydraulic driven testing machines).
This may not be a problem and damping adopter can be
inserted between the load cell and the specimen if this is a
problem.
Close off test area AE test area should be roped off to avoid noise from traffic,
people walking by or workers in near vicinity.
Avoid testing during high- Conduct AE tests in times where vibration- (rotating
noise times machinery) and electrical interference (antennas, power
lines) is a minimum (e.g. at night).
Sheltered testing Rain and wind cause noise from impact. Protecting test
object (sheltering) against environmental conditions reduces
effect of these noise sources.
Avoid temperature changes Temperature changes as caused for example by sun shine
during testing on a test object may introduce noise from
expansion/contraction of object. Tests carried out in the open
should be conducted after sun down.
Methods in Signal Range Selecting a monitoring range away from noise
Increase high pass corner Rotational and vibration noise typically is more strongly
frequency attenuated as frequency increases. In some environments,
especially in factories, 300 and 500 kHz sensors are used in
04-2017 file: amsy-6_opman.docm 142 of 149
AMSY-6 Operation Manual
place of 150 kHz.
Decrease low pass corner Electrical noise is typically at higher frequencies. Radio
frequency broadcasts are in the entire regime from 100 kHz to 3 MHz.
Shielding should be preferred solution and would be more
effective. However if it cannot be achieved properly low pass
filter with lower cut-off frequency may help.
Increase threshold Increasing AE threshold, while effective, decreases the
sensitivity of measurement.
Floating threshold Allowing the threshold to increase with rms is an old method
in acoustic emission. This also hurts sensitivity and effects
parameters that are the most dependent on threshold
(counts, duration).
Location or Channel Rejecting noise from a region
Arrival
Sensor sequence exclusions Placing guard sensors between sources of known AE and the
(guard) area of interest is one of the oldest methods discriminating
noise. A guard sensor approach allows a broad distribution
area of allowed AE.
Sensor sequence inclusion When it is known that only specific (critical) areas are
producing AE of interest, an inverse guard situation arises.
The method is essentially similar to guard sensors; however
the inclusion concentrates on a small area of AE rejecting a
broad distribution area as noise.
Location exclusion Location analysis can be more specific than simple guard
sensors; however the results depend on the quality of the
location.
Location inclusion Location inclusions have two advantages: (1) they are more
(clustering) precise than sensor sequences, (2) clusters of events, even if
absolute locations are inaccurate, indicate a single source
emitting repeatedly.
Avoiding analysis where AE AE-signals with same arrival time at channels may indicate
arrives simultaneously at cross-talk, i.e. signal transmission from channel to channel,
multiple sensors (∆t=0) which is supported by long cables running in parallel.
Same arrival time may also indicated electromagnetic
interference by e.g. switching on/off of luminescent tubes,
etc.
Signal/Parameter Analysing/rejecting signals with specific characteristics
Correlation
Exclusion by load ranges Especially in fatigue testing, specific load levels (falling load)
can be excluded to eliminate sources of noise.
Inclusion of evaluation zones If certain areas of testing are critical (high loads, specific
component loading), AE analysis can be limited to these
regions.
04-2017 file: amsy-6_opman.docm 143 of 149
AMSY-6 Operation Manual
Other parameter ranges A generalized load range test, depending on what
parameters are being fed into AE parametric input.
Excluding or downplaying AE Loading fixtures may slip at the onset of loading but only the
from initial loading onset. In materials testing this is known as a "Toe" and can
(laboratory tests) be seen in the stress-strain curve.
1-dimensional signal Aside from amplitude, some types of noise produce particular
parameter separation parameters. Leaks and rubbing can sometimes be identified
by long duration.
2-dimensional signal Sometimes a combination of two parameters is the most
correlation (correlation) effective identifier of noise. For instance:
Burst AE typically produces signals where counts/duration is
near the sensors resonance.
Electrical noise often produces high amplitude and short
duration hits.
Rubbing and leaking produces long duration and low
amplitude hits.
Pattern recognition (multi By providing samples of noise and signals, pattern
parameter correlation) recognition develops rules to classify signals by their
similarity or difference to the samples.
Inclusion/exclusion of signals Rather than strictly empirical observations, several
based on propagation/source structurally dependent observations of hits or events can be
aspects of measurements used for noise or signal identification. For instance, structural
waves (plate waves in plates, shell waves in shells) have
specific properties. Sources may have different sizes and
trends. These methods, while worth investigation, require
more discussion than presented here.
Observing and noting noise During testing, inadvertent episodes that produce noise by
outbursts e.g. unaware observers, unrelated plant operations,
miscommunications, etc. can produce sudden bursts of AE.
Observing and noting when this occurs and tagging it during
analysis is a simple method excluding noise from analysis.
20.4 Step 4: 1st reference measurement for stability of sensor
coupling quality
The pulsing tables let one easily and automatically check variations in the coupling quality of the
sensors.
In pulsing mode one channel transmits an electrical test pulse to the connected sensor. This
sensor injects a mechanical wave into the test object. The wave is detected by the neighboring
sensors. After 3 test pulses, the next sensor becomes the pulse emitter. The plausibility of the
received amplitude allows drawing conclusions on the stability of the coupling.
04-2017 file: amsy-6_opman.docm 144 of 149
AMSY-6 Operation Manual
Figure 33: schematic block diagram of pulsing: one channel emits pulses, the other channels
pick up the emitted waves.
A pulsing table for 4 channels is shown on the right. The
rows indicate the pulsing channels. The columns indicate the
receiving channels. The values in the cells correspond to the
response amplitude measured by a channel (column) when
another one (row) pulses.
E.g. row 2, column 1: 81dBAE. Channel 2 pulses and channel
1 responded to this pulse with a measured amplitude of
81dBAE
A pulsing channel always produces a response to its pulse. It is usually less than responses of
receiving channels because the pulse is fed over an attenuator (36dB) into the AE-channel. This
produces a time stamp of the emitted pulse.
A pulsing table is generated before and after the test in order to prove a constant quality of the
coupling. In case of very long tests a pulsing table can be generated in regular intervals.
In the end the corresponding pulsing tables are compared, i.e. the cell values are compared
pair-wise. If a deviation occurs (differences larger than 5-10dB) the coupling of the individual
channel(s) with large deviation have to be checked again by Hsu-Nielsen sources (see section
20.1.2). If the Hsu-Nielsen source test reveals a degradation of sensitivity a change in long term
coupling quality has to be assumed and if possible accounted for in the analysis.
20.5 Step 5: measuring speed of sound
Determining the speed of sound in a sample is essential if AE-sources should be localized.
Determining the speed of sound requires at least two AE-sensors mounted to the test object.
There are two methods of determining the speed of sound:
• Manual way: exciting an elastic wave by use of Hsu Nielsen sources and measuring the
arrival times at the two sensors.
• An automated way by using the pulser table and a location processor.
04-2017 file: amsy-6_opman.docm 145 of 149
AMSY-6 Operation Manual
Manual way
A Hsu Nielsen source is used to excite waves in the material. It is important that the Hsu
Nielsen source is on the extension of the straight line defined by the two sensors. The sensors
will pick up the wave at different times (arrival times). The sensor distance divided by the arrival
time difference will yield the speed of sound in the test object
Automated way
The automated way requires the definition of a location processor, in which the positions of the
sensors are defined. Pulsing tables can use the sensor position information of the location
processor to calculate the speed of sound automatically between each sensor pair.
Large differences in speed of sound in a plate can be caused by influence of wave modes.
Sensors in near vicinity of pulsing channel are more likely to be hit by a fast symmetrical wave
than sensors farther away.
20.6 Step 6: measuring attenuation
A signal loss (attenuation) test is normally recommended (in many AE standards) to determine
sensor spacing from a sensor discrimination distance. This distance is directly related with the
event lifetime and the velocity of sound in the material. By creating artificial AE (typically by
breaking pencil leads) at increasing distances, one determines the discrimination distance of the
artificial source with respect to threshold. Such a test can simultaneously be used to determine
event lifetime and confirm velocities.
20.7 Step 7: conducting AE-test
Conducting a reliable AE-Test will require correct setup of the measurement equipment. The
preceding steps (sections 20.1 to 20.6) should help to setup the equipment correct. In most
cases an online analysis is required for monitoring safety of an AE-test. The analysis setup has
to be done specifically according to the application and testing goal. No general setup can be
derived easily. The factory default setups for metallic pressure vessel, tank bottom test, etc.
provide some initial analysis setups. They have to be extended to meet the goals of a specific
AE-test goal.
20.8 Step 8: Post-test pulsing table for judging stability of sensor
coupling quality
Starting a posttest pulsing sequence is necessary to judge the quality of sensor coupling after a
test. Coupling tables before test and after test can be compared finding out any changes in
coupling quality of AE-sensors. Please see section 20.4 for more information.
20.9 Step 9: verifying location results
In some cases it may be necessary to verify location results. This is usually done after the test
by use of Hsu-Nielsen sources. Locating the Hsu Nielsen sources will help verifying the correct
position of the AE-source on the test object.
04-2017 file: amsy-6_opman.docm 146 of 149
AMSY-6 Operation Manual
21 Maintaining AMSY-6 hardware
21.1 System Verification
Today’s Acoustic Emission (AE) Systems are extremely flexible and multi-functional. A complete
verification of all the functions and results in accordance with the manufacturer’s specification
overcharges the majority of system operators. The requirements of today’s quality assurance
systems to maintain documents of evidence for periodic verification and calibration of
measurement equipment causes many operators to purchase expensive AE system verification
services from the AE system manufacturer. Vallen SysVeri is an approach for a more efficient
problem solution for users of AE systems model Vallen AMSY-6.
Vallen SysVeri is a software package that guides the operator through an automated verification
process: A number of signal patterns are automatically created by a programmable signal
generator, measured by the system under test, and verified by the VeriAnalyzer software. The
VeriAnalyzer creates a verification report for the system and for each channel.
The main difference between “verification“ and “calibration“ is given by the request, that a
“calibration“ needs signal generators traceable to a standard, and the laboratory executing
calibration services must be certified according to ISO 17025.
Vallen SysVeri, in combination with the required hardware accessories, makes system
verification a fast and straight forward process that can be performed by most AE system
operators even without the need of detailed system knowledge.
Vallen SysVeri operates on AMSY-6, AMSY-5 and also on the former model AMSY4.
21.1.1 Requirements
SysVeri requires a fully operational AE system model AMSY-5 or AMSY-6 including computer to
control the AMSY (see corresponding AMSY-x system specification for required operating
system and Vallen AE-Suite software release), software Microsoft Word 2000 or later, and
Vallen AE-Suite software release 2005.0401 or later, with software Key ‘SysVeri’ enabled.
For chassis verification, the following is also required:
• A programmable DC-calibrator with RS232 cable (CbD in Fig. 2), to stimulate the
parametric inputs. SysVeri-software supports the control of model “M2000” over RS232.
Software also supports the use of any manually controlled DC-Calibrator, e.g MIVC222-
HPII. Required accuracy: 0,015% at 10V, output range: 0 to +10V.
• BNC cable, BNC-T-connectors and adapter for the calibrator output (usually 4mm banana
sockets) to connect the DC-output voltage of the DC-calibrator to all parametric inputs in
parallel.
• An already verified Reference Board to measure the calibration pulse:
a) ASIP-2/A or ASIP-2/S board (with software releases higher than R2008.0101), or
b) ASIPP board with dummy high-pass (HP4-dum) and dummy low-pass (TP4-dum) filter
module.
For AE-channel verification the following is also required:
• A programmable Arbitrary Function Generator, to stimulate programmed waveforms of AE
bursts. SysVeri-software supports control of model “Agilent 33220A” over Ethernet or USB,
alternatively model “Agilent 33120A” over RS232 with appropriate cable to PC.
04-2017 file: amsy-6_opman.docm 147 of 149
AMSY-6 Operation Manual
• An appropriate cable to connect function generator with PC (RS232, USB, or Ethernet).
• DC-Bloc1: DC-Blocker for blocking the DC voltage supplied by the channel to protect the
function generator
• A BNC cable to connect the function generator output (over a DC-Blocker for ASIP-2
verification) to the AC-input of one AE channel at a time.
The PC must offer a sufficient number of free LPTx / RS232 / USB / Ethernet ports to control the
Sysveri-Adapter ET1 (LPT interface) resp. ET2 (USB interface), the Martel DC Calibrator
(RS232) and the function generator (RS232 or USB or Ethernet). If two RS232 devices are to
be used and there is only one free RS232 port, SysVeri can be used with very few restrictions.
For more information please see the user manual of the Vallen SysVeri "AMSY-5, AMSY-6
System Verification Software".
21.2 Sensor Tester
The Vallen Sensor Tester discovers any sensitivity change of your sensors on a regular basis.
The Vallen Sensor Tester is an easy to use software tool to perform sensor testing. It runs on
the AMSY-6 and controls a function generator driving an emitter with a well-known frequency
response face to face with the SUT (Sensor Under Test) that receives the signal. The data
acquisition by an AMSY-6 is controlled by the software as well. While stepping the software
adjustable frequency range the frequency response of the sensor and the complete
measurement chain is recorded.
This procedure represents fast and very efficient sensor verification. A number of settings allow
very flexible acquisition and display of the sensor’s properties. Among them are frequency
range to be scanned, emitted energy, step size and customized headers at the resulting
diagram. The result is displayed online and can be printed using any windows printer. The
hardcopy settings can be adjusted to your requirements by a printer preview display. User
defined comments and legends can be added for fast and professional reporting and
documentation. An ASCII table of the frequency response can be exported via clipboard to any
windows software, such as MS Excel for further analysis. Testing your sensors on a regular
basis using the Vallen Sensor Tester guarantees that the data you acquire is not influenced by
aging or defective sensors.
04-2017 file: amsy-6_opman.docm 148 of 149
AMSY-6 Operation Manual
22 AE-Accessories
A list of available accessories such as magnetic hold downs, cables, transport boxes, Hsu
Nielsen sources, etc can be found in the separate document “Acoustic Emission Accessories”
available on the current Vallen AE-Suite CD-ROM (\infoset) or at www.vallen.de/quote-ref .
04-2017 file: amsy-6_opman.docm 149 of 149
AMSY-6 Operation Manual
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Analog Filter Design M.E. Van Valkenburg 1982-600MDocument624 pagesAnalog Filter Design M.E. Van Valkenburg 1982-600Mdaygon100% (5)
- Databook Continental Agri 2006 PDFDocument0 pagesDatabook Continental Agri 2006 PDFdanilo3073No ratings yet
- Electromagnetic Imaging in Structural Health Monitoring (SHM) and Nondestructive Evaluation (NDE)Document40 pagesElectromagnetic Imaging in Structural Health Monitoring (SHM) and Nondestructive Evaluation (NDE)Fernando Piñal MoctezumaNo ratings yet
- Fernando PinalDocument36 pagesFernando PinalFernando Piñal MoctezumaNo ratings yet
- Phonetic AlphabetDocument1 pagePhonetic AlphabetGlemiston FigueiredoNo ratings yet
- FGC NetworkDocument1 pageFGC NetworkFernando Piñal MoctezumaNo ratings yet
- Samsung SmartTVDocument176 pagesSamsung SmartTVFernando Piñal MoctezumaNo ratings yet
- Base Vr64 EeuDocument240 pagesBase Vr64 EeuFernando Piñal MoctezumaNo ratings yet
- Voice Recognition System by Using An Automatic Classification ProcessorDocument6 pagesVoice Recognition System by Using An Automatic Classification ProcessorFernando Piñal MoctezumaNo ratings yet
- MFL42619401 LG ManualDocument19 pagesMFL42619401 LG ManualFernando Piñal MoctezumaNo ratings yet
- AE Testing Fundamentals, Equipment, ApplicationsDocument30 pagesAE Testing Fundamentals, Equipment, ApplicationsFernando Piñal MoctezumaNo ratings yet
- DCOM Rslogix5000Document30 pagesDCOM Rslogix5000Sneider CastañedaNo ratings yet
- DCOM Rslogix5000Document30 pagesDCOM Rslogix5000Sneider CastañedaNo ratings yet
- Sony FDR AX1 - E ProDocument68 pagesSony FDR AX1 - E ProTodorNo ratings yet
- TransformerDocument14 pagesTransformerNegrea Cristian0% (3)
- CS 450 Assignment 5 SolutionsDocument3 pagesCS 450 Assignment 5 Solutionshidrovo3589No ratings yet
- Table StructureDocument180 pagesTable StructureVictor PathakNo ratings yet
- Foxpro Treeview ControlDocument5 pagesFoxpro Treeview ControlJulio RojasNo ratings yet
- Mechanical Spring MEDocument89 pagesMechanical Spring MEimranNo ratings yet
- Aluminium - Copper AlloysDocument3 pagesAluminium - Copper AlloysRex RusselNo ratings yet
- Sec1 1 1Document2 pagesSec1 1 1rajfmc100% (1)
- Til 1213 R1Document6 pagesTil 1213 R1Hernan GirautNo ratings yet
- MTK 1023-Material and ConsumableDocument13 pagesMTK 1023-Material and ConsumableGraceLamNo ratings yet
- Flying Qualities CriteriaDocument24 pagesFlying Qualities CriteriajoereisNo ratings yet
- Roof Manual p10Document1 pageRoof Manual p10AllistairNo ratings yet
- 9365Document69 pages9365Kivanc NEROGLUNo ratings yet
- Sony Cdx-G3100ue G3100uv G3150up G3150uv Ver.1.1 PDFDocument38 pagesSony Cdx-G3100ue G3100uv G3150up G3150uv Ver.1.1 PDFLisandroPeñateNo ratings yet
- Licenta - Algoritmi de Rezolvare A Cubului Rubik PDFDocument46 pagesLicenta - Algoritmi de Rezolvare A Cubului Rubik PDFRazvan SavucNo ratings yet
- CT v2.0 UnderstandingDocument36 pagesCT v2.0 UnderstandingAbel Chaiña GonzalesNo ratings yet
- Traction Motors E WebDocument16 pagesTraction Motors E WebMurat YaylacıNo ratings yet
- West Virginia Transporter 2017Document16 pagesWest Virginia Transporter 2017Kyle LangsleyNo ratings yet
- Servomotor WedgeDocument24 pagesServomotor WedgeAlanNo ratings yet
- Pulse Emitter EM345Document1 pagePulse Emitter EM345wahid.hamraoui.2019No ratings yet
- Copeland Cr28k6 PFV Recip Compressor Technical Specifications2Document1 pageCopeland Cr28k6 PFV Recip Compressor Technical Specifications2PerezNo ratings yet
- FRP Fish TanksDocument33 pagesFRP Fish TanksA.Subin DasNo ratings yet
- Resume AkuDocument4 pagesResume AkukeylastNo ratings yet
- Precast Capping Beam Formers DatasheetDocument2 pagesPrecast Capping Beam Formers Datasheetsantoshgpr100% (1)
- Developer For System Z: Quick Start GuideDocument2 pagesDeveloper For System Z: Quick Start GuideUmesha GowdaNo ratings yet
- Orca Share Media1541759628568 PDFDocument12 pagesOrca Share Media1541759628568 PDFJuneNeilBalacuitNo ratings yet
- Simulasi Pengendalian Level Steam DrumDocument15 pagesSimulasi Pengendalian Level Steam DrumSatria dinusaNo ratings yet
- Specification For Construction of Concrete ReservoirsDocument18 pagesSpecification For Construction of Concrete ReservoirsKeysha ApriliaNo ratings yet
- SET-1: Answer To The Interview QuestionsDocument9 pagesSET-1: Answer To The Interview QuestionsÆshok IncreĐible KingNo ratings yet