You might also like
- Computer BasicsDocument94 pagesComputer Basicssanthosh hkNo ratings yet
- Introduction To Spring Framework (Presentation - 143 Slides)Document143 pagesIntroduction To Spring Framework (Presentation - 143 Slides)ammayi100100% (1)
- Okta Technical Security WhitepaperDocument46 pagesOkta Technical Security WhitepaperAbhishek BahiratNo ratings yet
- Nonlinear ProgrammingDocument5 pagesNonlinear Programminguser2127No ratings yet
- Transportation ProblemDocument20 pagesTransportation ProblemChasity WrightNo ratings yet
- Meeting and Interview MinutesDocument5 pagesMeeting and Interview MinutesRadoslav RobertNo ratings yet
- Operations Research ProjectDocument21 pagesOperations Research ProjectDeepak KanojiaNo ratings yet
- Introduction ISO 55001Document66 pagesIntroduction ISO 55001Indra GirsangNo ratings yet
- (MAI 1.1) NUMBERS - ROUNDING - PERCENTAGE ERROR - SolutionsDocument4 pages(MAI 1.1) NUMBERS - ROUNDING - PERCENTAGE ERROR - SolutionsJuhi Kastiya100% (1)
- Operation Research Project TransportationDocument11 pagesOperation Research Project TransportationAmit87% (23)
- SWIFT Gpi For Financial Institution Application Profile: Incoming Messages Outgoing MessagesDocument2 pagesSWIFT Gpi For Financial Institution Application Profile: Incoming Messages Outgoing MessagesSushma V KumarNo ratings yet
- Transportation and Assignment ProblemDocument13 pagesTransportation and Assignment Problemevr6eaxnNo ratings yet
- 75 Sample ChapterDocument10 pages75 Sample ChapterkannambiNo ratings yet
- Assignment Problems in Operation ResearchDocument6 pagesAssignment Problems in Operation Researchcjbhfzr4No ratings yet
- MATLAB Implementation of Vogel S ApproxiDocument5 pagesMATLAB Implementation of Vogel S ApproxiMounaNo ratings yet
- Alternatives To Vehicle Routing Planning Through Exact and Approximate MethodsDocument5 pagesAlternatives To Vehicle Routing Planning Through Exact and Approximate MethodsThe IjbmtNo ratings yet
- Discussion Paper 1211Document32 pagesDiscussion Paper 1211FamoNo ratings yet
- Quadrati4: Virginia MilitaryDocument9 pagesQuadrati4: Virginia Militaryaris909No ratings yet
- Composite Stock CuttingDocument18 pagesComposite Stock CuttingJefferson SantanaNo ratings yet
- S T P U T B C M: Olving Ransportation Roblems Sing HE EST Andidates EthodDocument8 pagesS T P U T B C M: Olving Ransportation Roblems Sing HE EST Andidates EthodRahul RoyNo ratings yet
- Mba Semester 2 MB0048 - Operations Research-4 Credits (Book ID: B1137) Assignment Set - 2 (60 Marks)Document13 pagesMba Semester 2 MB0048 - Operations Research-4 Credits (Book ID: B1137) Assignment Set - 2 (60 Marks)Maulik Parekh100% (1)
- Transportation Problem: Transportation Problems. Basically, The Purpose Is To Minimize The Cost of Shipping Goods FromDocument20 pagesTransportation Problem: Transportation Problems. Basically, The Purpose Is To Minimize The Cost of Shipping Goods FromAnonymous KpVxNXsNo ratings yet
- Genetic Algorithm For Vehicle Routing Problem With BackhaulsDocument8 pagesGenetic Algorithm For Vehicle Routing Problem With BackhaulsYuri Adixs Ucux'saeNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document7 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- A Duality Theory Approach To The Environmental-Economic Dispatch ProblemDocument10 pagesA Duality Theory Approach To The Environmental-Economic Dispatch ProblemHakan ÇAMNo ratings yet
- 1 s2.0 S0166218X13002266 Main 2 PDFDocument8 pages1 s2.0 S0166218X13002266 Main 2 PDFClaudiaGarciaBareaNo ratings yet
- Locally Linear Support Vector Machines: ( 1, 1) The Task Is To Estimate The Label yDocument8 pagesLocally Linear Support Vector Machines: ( 1, 1) The Task Is To Estimate The Label yEZ112No ratings yet
- ChapterDocument13 pagesChaptertamann2004No ratings yet
- Dynamic Pickup and Delivery ProblemsDocument8 pagesDynamic Pickup and Delivery ProblemsVuong Bui VietNo ratings yet
- Method For Solving Unbalanced Transportation Problems Using Standard DeviationsDocument20 pagesMethod For Solving Unbalanced Transportation Problems Using Standard DeviationsSyed Ibrahim Syed ahamed kabirNo ratings yet
- A. H. Land A. G. Doig: Econometrica, Vol. 28, No. 3. (Jul., 1960), Pp. 497-520Document27 pagesA. H. Land A. G. Doig: Econometrica, Vol. 28, No. 3. (Jul., 1960), Pp. 497-520john brownNo ratings yet
- H y B R I D I Z e D P A R A L L e L G e N e T I C A L G o R I T H M F o R F A C I L I T y L o C A T I o N P R o B L e MDocument7 pagesH y B R I D I Z e D P A R A L L e L G e N e T I C A L G o R I T H M F o R F A C I L I T y L o C A T I o N P R o B L e MRudy HermawanNo ratings yet
- Mehrkanoon 2012Document12 pagesMehrkanoon 2012yalocim666No ratings yet
- A Quasi-Boundary Semi-Analytical Method For Backward in Time Advection-Dispersion EquationDocument26 pagesA Quasi-Boundary Semi-Analytical Method For Backward in Time Advection-Dispersion EquationmmrmathsiubdNo ratings yet
- Guidelines For The Use of Meta-Heuristics in Combinatorial OptimizationDocument6 pagesGuidelines For The Use of Meta-Heuristics in Combinatorial OptimizationJuan Carlos Arriagada NavarroNo ratings yet
- Stope Boundary Optimization Using A 3D Approximate Hybrid AlgorithmDocument14 pagesStope Boundary Optimization Using A 3D Approximate Hybrid AlgorithmKENNY BRANDON MAWODZWANo ratings yet
- Assignment ProblemDocument29 pagesAssignment Problemvenky364No ratings yet
- DEED IntroDocument10 pagesDEED IntroVeerasundaram MNo ratings yet
- Flex MG ArchDocument44 pagesFlex MG ArchsdfasdfkksfjNo ratings yet
- B05030918 PDFDocument10 pagesB05030918 PDFinventionjournalsNo ratings yet
- Operations ResearchDocument18 pagesOperations ResearchCynthia CamachoNo ratings yet
- Application of A Dual Simplex Method To Transportation Problem To Minimize The CostDocument5 pagesApplication of A Dual Simplex Method To Transportation Problem To Minimize The CostInternational Journal of Innovations in Engineering and ScienceNo ratings yet
- Optimum Coordination of Overcurrent Relays Using SADE AlgorithmDocument10 pagesOptimum Coordination of Overcurrent Relays Using SADE AlgorithmJamile_P_NNo ratings yet
- An Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The VariablesDocument9 pagesAn Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The Variablesgijs fehmersNo ratings yet
- Weighted Residual Finite Element MethodDocument27 pagesWeighted Residual Finite Element MethodYaski SwathiNo ratings yet
- Fault Diagnosis of Power Transformer Based On Multi-Layer SVM ClassifierDocument7 pagesFault Diagnosis of Power Transformer Based On Multi-Layer SVM ClassifierFelipe KaewNo ratings yet
- Khalouli 2008Document6 pagesKhalouli 2008Nabli ZouhourNo ratings yet
- Optimization of Logistics I 2 Typical Problems r20 PDFDocument60 pagesOptimization of Logistics I 2 Typical Problems r20 PDFDeisy Ñontol MuñozNo ratings yet
- A Novel Initial Basic Feasible Solution Method For Transportation ProblemDocument5 pagesA Novel Initial Basic Feasible Solution Method For Transportation ProblemEby Agusriani SitanggangNo ratings yet
- SEM 2 MB0032 1 Operations ResearchDocument13 pagesSEM 2 MB0032 1 Operations Researchalokmitra_upNo ratings yet
- Finite Element Method: From Wikipedia, The Free EncyclopediaDocument13 pagesFinite Element Method: From Wikipedia, The Free EncyclopediaMuhammad SafdarNo ratings yet
- A Simulated Annealing Code For General Integer Linear ProgramsDocument19 pagesA Simulated Annealing Code For General Integer Linear Programsmilos79No ratings yet
- Research Fellow, European Space Agency Advanced Concepts Team. Research Coordinator, European Space Agency Advanced Concepts TeamDocument18 pagesResearch Fellow, European Space Agency Advanced Concepts Team. Research Coordinator, European Space Agency Advanced Concepts TeamESA Advanced Concepts TeamNo ratings yet
- Explanation-Based Repair Techniques For Solving Dynamic Scheduling ProblemsDocument2 pagesExplanation-Based Repair Techniques For Solving Dynamic Scheduling Problemsppkppk7890No ratings yet
- The MMF Rerouting Computation ProblemDocument7 pagesThe MMF Rerouting Computation ProblemJablan M KaraklajicNo ratings yet
- An Improved Ant Colony Algorithm and Its ApplicatiDocument10 pagesAn Improved Ant Colony Algorithm and Its ApplicatiI n T e R e Y eNo ratings yet
- Unit 5 Assignment Problems: StructureDocument34 pagesUnit 5 Assignment Problems: StructureAnkit KashyapNo ratings yet
- © Association For Scientific Research: Mathematical and Computational Applications, Vol. - , No. - , Pp.Document12 pages© Association For Scientific Research: Mathematical and Computational Applications, Vol. - , No. - , Pp.Jangshik BaboNo ratings yet
- (1995) (Rochat-Taillard) Probabilistic Diversification and Intensification in Local Search For Vehicle RoutingDocument13 pages(1995) (Rochat-Taillard) Probabilistic Diversification and Intensification in Local Search For Vehicle RoutingtrivilintarolasNo ratings yet
- Research Article: Sizing A Hybrid Renewable Energy System by A Coevolutionary Multiobjective Optimization AlgorithmDocument9 pagesResearch Article: Sizing A Hybrid Renewable Energy System by A Coevolutionary Multiobjective Optimization AlgorithmfbhkeNo ratings yet
- Integración de Inventario A La DistribuciónDocument19 pagesIntegración de Inventario A La DistribuciónLuis Arnulfo Sanchez DiazNo ratings yet
- Quadratic Programming and Genetic Algorithms For Solving The Binary Constraint Satisfaction ProblemsDocument10 pagesQuadratic Programming and Genetic Algorithms For Solving The Binary Constraint Satisfaction ProblemsJournal of ComputingNo ratings yet
- A Hybrid Simulated Annealing With KempeDocument6 pagesA Hybrid Simulated Annealing With KempeLoli BhaiNo ratings yet
- 2010 XIISP LongMidTermPlanning LNGPlantsDocument2 pages2010 XIISP LongMidTermPlanning LNGPlantsAndré DinizNo ratings yet
- Depth Estimation Using CNN With Transfer LearningDocument15 pagesDepth Estimation Using CNN With Transfer LearningUmang SoniNo ratings yet
- WELDER (Dual Mode) : Under Dual Training SystemDocument33 pagesWELDER (Dual Mode) : Under Dual Training SystemUmang SoniNo ratings yet
- Trade Theory - Draughtsman-SyllabusDocument6 pagesTrade Theory - Draughtsman-SyllabusUmang SoniNo ratings yet
- Syllabus For Workshop Calculation and ScienceDocument2 pagesSyllabus For Workshop Calculation and ScienceUmang SoniNo ratings yet
- Trade Theory Welder-SyllabusDocument4 pagesTrade Theory Welder-SyllabusUmang SoniNo ratings yet
- Draughtsman (Mechanical)Document28 pagesDraughtsman (Mechanical)Umang SoniNo ratings yet
- Depth Estimation Using CNN With Transfer LearningDocument15 pagesDepth Estimation Using CNN With Transfer LearningUmang SoniNo ratings yet
- Simulated AnnealinDocument55 pagesSimulated AnnealinsithansakthiNo ratings yet
- List of JournalsDocument1 pageList of JournalsUmang SoniNo ratings yet
- Transportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengDocument17 pagesTransportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengUmang SoniNo ratings yet
- 2008 09 PDFDocument20 pages2008 09 PDFRobin CookNo ratings yet
- Evaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFDocument19 pagesEvaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFUmang SoniNo ratings yet
- Knowledge Representation Proposition LogicDocument10 pagesKnowledge Representation Proposition LogicKiran WadeyarNo ratings yet
- Transportation Research Part E: Dong-Ping Song, Andrew Lyons, Dong Li, Hossein SharifiDocument22 pagesTransportation Research Part E: Dong-Ping Song, Andrew Lyons, Dong Li, Hossein SharifiUmang SoniNo ratings yet
- Robust Global Supply Chain Network Design Under Disruption and Uncertainty Considering Resilience Strategies A Parallel Memetic Algorithm For A Real L PDFDocument33 pagesRobust Global Supply Chain Network Design Under Disruption and Uncertainty Considering Resilience Strategies A Parallel Memetic Algorithm For A Real L PDFUmang SoniNo ratings yet
- Integrated Recovery of Aircraft and Passengers After Airline Operation Disruption Based On A GRASP Algorithm 2016 Transportation Research Part E LogisDocument16 pagesIntegrated Recovery of Aircraft and Passengers After Airline Operation Disruption Based On A GRASP Algorithm 2016 Transportation Research Part E LogisUmang SoniNo ratings yet
- AHPapls 1Document11 pagesAHPapls 1Raghu Vamsi PotukuchiNo ratings yet
- Expert Systems With Applications: Ming-Lang TsengDocument11 pagesExpert Systems With Applications: Ming-Lang TsengUmang SoniNo ratings yet
- Examining Risk Priority Numbers in FMEA PDFDocument4 pagesExamining Risk Priority Numbers in FMEA PDFUmang SoniNo ratings yet
- Transportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengDocument17 pagesTransportation Research Part E: Tiaojun Xiao, Tsan-Ming Choi, T.C.E. ChengUmang SoniNo ratings yet
- The Origin Destination Airport Choice For All Cargo Aircraft Operations in Europe - 2016 - Transportation Research Part E Logistics and Transportation RevDocument22 pagesThe Origin Destination Airport Choice For All Cargo Aircraft Operations in Europe - 2016 - Transportation Research Part E Logistics and Transportation RevUmang SoniNo ratings yet
- Solving An Integrated Operational Transportation Planning Problem With Forwarding Limitations - 2016 - Transportation Research Part E Logistics and TranspDocument18 pagesSolving An Integrated Operational Transportation Planning Problem With Forwarding Limitations - 2016 - Transportation Research Part E Logistics and TranspUmang SoniNo ratings yet
- Evaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFDocument19 pagesEvaluating The Solution Performance of IP and CP For Berth Allocation With Time Varying Water Depth - 2016 - Transportation Research Part E Logistics and PDFUmang SoniNo ratings yet
- Case Study - Project Selection and Its Impact On The Successful Deployment of Six SigmaDocument21 pagesCase Study - Project Selection and Its Impact On The Successful Deployment of Six SigmaUmang SoniNo ratings yet
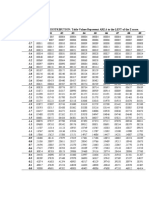
- STANDARD NORMAL DISTRIBUTION: Table Values Represent AREA To The LEFT of The Z ScoreDocument2 pagesSTANDARD NORMAL DISTRIBUTION: Table Values Represent AREA To The LEFT of The Z ScoreUmang SoniNo ratings yet
- Escalator's Arrangement 1. A Single Escalator Arrangement: August 2016 SemesterDocument10 pagesEscalator's Arrangement 1. A Single Escalator Arrangement: August 2016 SemesterUmang SoniNo ratings yet
- Case Study Project Selection - BMWDocument24 pagesCase Study Project Selection - BMWUmang SoniNo ratings yet
- AHPapls 1Document11 pagesAHPapls 1Raghu Vamsi PotukuchiNo ratings yet
- COPing With UncerDocument1 pageCOPing With UncerUmang SoniNo ratings yet
- An Interdependent Layered Network Model For A Resilient Supply Chain 2014 OmegaDocument13 pagesAn Interdependent Layered Network Model For A Resilient Supply Chain 2014 OmegaUmang SoniNo ratings yet
- Order Form For Littelfuse Door Lock2Document6 pagesOrder Form For Littelfuse Door Lock2Lester MuscaNo ratings yet
- ScanSoft OmniPage SE 4.0Document1 pageScanSoft OmniPage SE 4.0hadzilNo ratings yet
- MIT18 445S15 Lecture8 PDFDocument11 pagesMIT18 445S15 Lecture8 PDFkrishnaNo ratings yet
- RAN Signaling Analysis Guide (RAN10.0 - 02)Document245 pagesRAN Signaling Analysis Guide (RAN10.0 - 02)Juan Camilo GalvisNo ratings yet
- Birlasoft Resume SampleDocument3 pagesBirlasoft Resume SamplePrince Kumar ChaudharyNo ratings yet
- Introduction To Design VerificationDocument60 pagesIntroduction To Design VerificationKesavaram ChallapalliNo ratings yet
- GoogleDocument3 pagesGoogleAKSHAY KHAMARNo ratings yet
- A Multi-Sphere Scheme For 2D and 3D PackingDocument5 pagesA Multi-Sphere Scheme For 2D and 3D PackingArs Santosh KumarNo ratings yet
- MPPT - Maximum Power Point TrackingDocument9 pagesMPPT - Maximum Power Point TrackingSanjeev ReddyNo ratings yet
- Recruiters Guide EngDocument15 pagesRecruiters Guide EngAndrea Baron SNo ratings yet
- Dreambox 500 For Newbies 6.1Document140 pagesDreambox 500 For Newbies 6.1Jay McGovernNo ratings yet
- TQM Clause 45Document4 pagesTQM Clause 45MychaWongNo ratings yet
- TS 600 PS BC Manual ENGDocument54 pagesTS 600 PS BC Manual ENGMesafint kassieNo ratings yet
- Managing Hotspot Clients With RadiusDocument34 pagesManaging Hotspot Clients With Radiusiosmaris2331No ratings yet
- Spatial Reciprocity of Uplink and Downlink Radio Channels in FDD SystemsDocument7 pagesSpatial Reciprocity of Uplink and Downlink Radio Channels in FDD SystemscksmerNo ratings yet
- AIF BizTalk Adapter Configuration For Data Exchange Part IIDocument46 pagesAIF BizTalk Adapter Configuration For Data Exchange Part IIUmbBNo ratings yet
- ROWE Scan 600 Manual PDFDocument157 pagesROWE Scan 600 Manual PDFMārtiņš DreijersNo ratings yet
- Studio Pricelist PDFDocument6 pagesStudio Pricelist PDFDina Shofiana FaniNo ratings yet
- Tabla KatanaDocument4 pagesTabla KatanaAntonioNo ratings yet
- S&H Office Interior DrawingsDocument14 pagesS&H Office Interior Drawingssri vidhya AmbikaNo ratings yet
- Shubham SinghalDocument1 pageShubham SinghalSahil0111No ratings yet
- (9-1) Igcse Ict Chapter 6 - 7Document5 pages(9-1) Igcse Ict Chapter 6 - 7rahimuddinNo ratings yet