You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Microstructural Evolution and Observed Stress Response During Hot Deformation of 5005 and 6022 Al AlloysDocument8 pagesMicrostructural Evolution and Observed Stress Response During Hot Deformation of 5005 and 6022 Al AlloysatseucNo ratings yet
- Infrared Absorption SpectrosDocument25 pagesInfrared Absorption SpectrosatseucNo ratings yet
- Geothermal Solutions PDFDocument36 pagesGeothermal Solutions PDFatseucNo ratings yet
- Forming Limit DiagramsDocument7 pagesForming Limit DiagramsatseucNo ratings yet
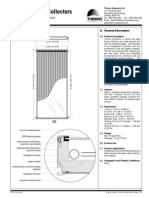
- S SERIES Solar Collectors: Glazed Liquid Flat Plate CollectorsDocument8 pagesS SERIES Solar Collectors: Glazed Liquid Flat Plate CollectorsatseucNo ratings yet
- Progress in Development of High-Temperature Solar-Selective Coating PDFDocument7 pagesProgress in Development of High-Temperature Solar-Selective Coating PDFatseucNo ratings yet
- A Study of Ac Reactive Magnetron Sputtering Technique For The Deposition of Compositionally Graded Coating in The Cr-Al-N System PDFDocument8 pagesA Study of Ac Reactive Magnetron Sputtering Technique For The Deposition of Compositionally Graded Coating in The Cr-Al-N System PDFatseucNo ratings yet
- Evaluation of Sheet Metal Formability by Tensile TestsDocument12 pagesEvaluation of Sheet Metal Formability by Tensile TestsatseucNo ratings yet
- G Series TechDocument8 pagesG Series TechatseucNo ratings yet
- Sunstrip TechDocument4 pagesSunstrip TechatseucNo ratings yet
- Solar Boiler TechDocument8 pagesSolar Boiler TechatseucNo ratings yet
- RefrigPipingHandbook SuvaDocument161 pagesRefrigPipingHandbook SuvaDaveB11WhitNo ratings yet
- Thermomax Evacuated Heat Pipe Solar Collector TechnologyDocument29 pagesThermomax Evacuated Heat Pipe Solar Collector TechnologyatseucNo ratings yet
- A Study of Ac Reactive Magnetron Sputtering Technique For The Deposition of Compositionally Graded Coating in The Cr-Al-N System PDFDocument8 pagesA Study of Ac Reactive Magnetron Sputtering Technique For The Deposition of Compositionally Graded Coating in The Cr-Al-N System PDFatseucNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Temperature Compensated Battery State-Of-Charge (Soc) Table 1.1Document8 pagesTemperature Compensated Battery State-Of-Charge (Soc) Table 1.1Nadeem MirzaNo ratings yet
- 17 Dielectric Propertiesand Insulation System DesignDocument5 pages17 Dielectric Propertiesand Insulation System DesignDinesh Selvakumar100% (1)
- Diagramas Esquematicos TV LED LGDocument49 pagesDiagramas Esquematicos TV LED LGLuis Alonso Rosero Velez100% (1)
- Isolation Permit SafetyDocument2 pagesIsolation Permit SafetyMohammed KadhimNo ratings yet
- Basics of Industrial Maintenance (Schoolcraft Publishing)Document7 pagesBasics of Industrial Maintenance (Schoolcraft Publishing)rfgerfgNo ratings yet
- Diode Circuits PDFDocument112 pagesDiode Circuits PDFdzNo ratings yet
- List of Books EEEDocument32 pagesList of Books EEER.n. Patel0% (1)
- Samsung SM-A105F - M - G Service Manual (Phonelumi - Com) PDFDocument126 pagesSamsung SM-A105F - M - G Service Manual (Phonelumi - Com) PDFJhonNo ratings yet
- Wireless World 1923 11Document142 pagesWireless World 1923 11Jan PranNo ratings yet
- Calculate Total Apparent, Average and Reactive Power in 3-Phase - Electrical Engineering Stack ExchangeDocument3 pagesCalculate Total Apparent, Average and Reactive Power in 3-Phase - Electrical Engineering Stack ExchangeNikšaNo ratings yet
- NEW Product Fortindo 2020 zj8g2tDocument4 pagesNEW Product Fortindo 2020 zj8g2tKenz ZhouNo ratings yet
- Voltage Regulator: Semiconductor Technical DataDocument9 pagesVoltage Regulator: Semiconductor Technical DataEnriqueNo ratings yet
- Logic GatesDocument8 pagesLogic GatesNikunj ThakkarNo ratings yet
- Energy-Saving Project of 5500-HP 13-kV Wound Rotor Induction Motor On A Kiln ID Fan Using A Low-Voltage Slip Power Recovery Drive-A Case StudyDocument5 pagesEnergy-Saving Project of 5500-HP 13-kV Wound Rotor Induction Motor On A Kiln ID Fan Using A Low-Voltage Slip Power Recovery Drive-A Case StudyJulioNo ratings yet
- EMT Notes by M. SadiqDocument10 pagesEMT Notes by M. SadiqMuhammad SadiqNo ratings yet
- UcD-Super Lite V.2 FINALDocument1 pageUcD-Super Lite V.2 FINALbeytullahNo ratings yet
- Reduction of Multiple Control SubsystemsDocument21 pagesReduction of Multiple Control Subsystemsandik yuliantoNo ratings yet
- Eco Line P60/270 - 290 W: Polycrystalline Module FamilyDocument2 pagesEco Line P60/270 - 290 W: Polycrystalline Module FamilyAlberto Méndez CarreraNo ratings yet
- 7000 001Document7 pages7000 001Chaitannya MahatmeNo ratings yet
- Lecture-2 Bioelectric Amplifiers and Measuring InstrumentsDocument29 pagesLecture-2 Bioelectric Amplifiers and Measuring InstrumentsHundessa DabaNo ratings yet
- ICP MS - TuneSim HelpDocument2 pagesICP MS - TuneSim Help张旭东No ratings yet
- Nuts Volts - 2014 10Document84 pagesNuts Volts - 2014 10colin37100% (1)
- Company Introduction (ILJIN Electric) 2009 LatestDocument43 pagesCompany Introduction (ILJIN Electric) 2009 Latestgabriel_petre2001No ratings yet
- Validation of A New Method For The Diagnosis of Rotor Bar Failures Via Wavelet Transformation in Industrial Induction MachinesDocument6 pagesValidation of A New Method For The Diagnosis of Rotor Bar Failures Via Wavelet Transformation in Industrial Induction MachinesVivek Kumar RuhilNo ratings yet
- Electrical Specification For Construction SiteDocument33 pagesElectrical Specification For Construction SiteWaleNo ratings yet
- Lecture-9 Transmission ImpairmentDocument15 pagesLecture-9 Transmission ImpairmentRIMSHANo ratings yet
- SS XXXBSActivePFCDocument1 pageSS XXXBSActivePFCmropzNo ratings yet
- Free Electron Theory Relaxation Collision TimeDocument25 pagesFree Electron Theory Relaxation Collision TimeSuriya gadget guruNo ratings yet
- Vor221184-Es1 2-131-132Document4 pagesVor221184-Es1 2-131-132Emanuel SotoNo ratings yet
- EE Workshop Practice Course Code GuideDocument5 pagesEE Workshop Practice Course Code GuideRajnish KumarNo ratings yet