You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- LEARN ABOUT ELECTRICITY AND ITS KEY TERMSDocument30 pagesLEARN ABOUT ELECTRICITY AND ITS KEY TERMSAdrielle LadazzaNo ratings yet
- Expression of Interest (E.O.I.) Fire Fighting System BOQ (NSRDocument3 pagesExpression of Interest (E.O.I.) Fire Fighting System BOQ (NSRKarthick MahadevanNo ratings yet
- Komatsu Wheel Loader Wa380 6 Operation and Maintenance ManualDocument20 pagesKomatsu Wheel Loader Wa380 6 Operation and Maintenance Manualreva100% (41)
- LS01 ServiceDocument53 pagesLS01 ServicehutandreiNo ratings yet
- Nokia FlashDocument10 pagesNokia FlashOlu Mal PeneNo ratings yet
- Ignition TroubleShooting PDFDocument2 pagesIgnition TroubleShooting PDFchichid20080% (1)
- GMKN 1022Document6 pagesGMKN 10221012268087No ratings yet
- Technical Data Sheet Opus A6 Standard Full: Wachendorff Elektronik GMBH & Co. KGDocument7 pagesTechnical Data Sheet Opus A6 Standard Full: Wachendorff Elektronik GMBH & Co. KGLe Viet ThanhNo ratings yet
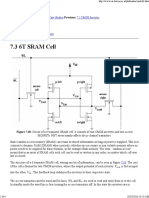
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterDocument4 pages7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpNo ratings yet
- Zilkee™ Ultra Recovery ConverterDocument17 pagesZilkee™ Ultra Recovery ConverterPera KojotNo ratings yet
- Adjustable Precision Shunt Regulator Reference DiodeDocument8 pagesAdjustable Precision Shunt Regulator Reference DiodedarioNo ratings yet
- Control System (FS)Document44 pagesControl System (FS)Lucas RamirezNo ratings yet
- Operating Manual: Smartgen ElectronicsDocument6 pagesOperating Manual: Smartgen ElectronicsVinhNo ratings yet
- Getinge Kseries Articlelist Revb 151001 enDocument6 pagesGetinge Kseries Articlelist Revb 151001 enHamideOmraniNo ratings yet
- Hydrostatic Pump (Manual Controls, AHC & ACS) (Right Half) - S300Document4 pagesHydrostatic Pump (Manual Controls, AHC & ACS) (Right Half) - S300Alfredo GuzmánNo ratings yet
- Module 3: Flip FlopsDocument34 pagesModule 3: Flip FlopsDevika UNo ratings yet
- 2017 BMW R Ninet Scrambler 71662Document163 pages2017 BMW R Ninet Scrambler 71662Anas KhanNo ratings yet
- 04 Cuculic Celic PrencDocument8 pages04 Cuculic Celic PrencStanislava RokvicNo ratings yet
- Camshaft CatalogDocument6 pagesCamshaft CatalogAhmedNo ratings yet
- ICS 3022 Accelerometer DatasheetDocument4 pagesICS 3022 Accelerometer DatasheetsergiojgsNo ratings yet
- Feeder Protection System: Grid SolutionsDocument328 pagesFeeder Protection System: Grid SolutionsVuiLênNàoNo ratings yet
- Inspeksi KendaraanDocument1 pageInspeksi Kendaraanbima prayudiNo ratings yet
- 2300 - US Army Equipment - GuideDocument77 pages2300 - US Army Equipment - GuiderutiusNo ratings yet
- Hydraulic/Hydrostatic Schematic: S175 (S/N A3L520001 AND ABOVE)Document2 pagesHydraulic/Hydrostatic Schematic: S175 (S/N A3L520001 AND ABOVE)alexandrNo ratings yet
- TW2022 CatalogueDocument41 pagesTW2022 Catalogueeng.abdullrahmanNo ratings yet
- Automatic H2o Pump ControllerDocument14 pagesAutomatic H2o Pump ControllerSowham ChatterjeeNo ratings yet
- R-G2 Controller Maintenance PDFDocument336 pagesR-G2 Controller Maintenance PDFpabs2604No ratings yet
- 310nom B5Document116 pages310nom B5Naidan DensmaaNo ratings yet
- Mfge09l 1Document6 pagesMfge09l 1Joseph ZamoraNo ratings yet
- Tecumseh Model Lav35 40327k Parts ListDocument8 pagesTecumseh Model Lav35 40327k Parts ListTorney BenedictNo ratings yet