You might also like
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- L44 5807 PDFDocument27 pagesL44 5807 PDFbacuoc.nguyen356No ratings yet
- Buck Converter Circuit AnalysisDocument5 pagesBuck Converter Circuit AnalysisselageaalinNo ratings yet
- Analysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersDocument22 pagesAnalysis and Design of Analog Integrated Circuits Frequency Response of AmplifiersAndrea FasatoNo ratings yet
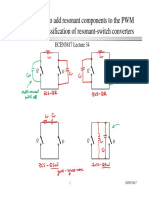
- Possible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersDocument11 pagesPossible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersdjyNo ratings yet
- Review For Test 2: Sample ProblemsDocument16 pagesReview For Test 2: Sample ProblemsEric VonFreemanNo ratings yet
- Basic CircuitsDocument34 pagesBasic CircuitsLama ZahiNo ratings yet
- Pass-Transistor Logic GatesDocument15 pagesPass-Transistor Logic GatesAlfred Kiruba RajNo ratings yet
- MIT OCW 6.012-Lec24Document17 pagesMIT OCW 6.012-Lec24AbhishekNo ratings yet
- Part IV OpampDocument45 pagesPart IV OpampKunalNo ratings yet
- 7 LogicStyle3Document59 pages7 LogicStyle3YeasminNo ratings yet
- TND351 DDocument23 pagesTND351 DmptejaNo ratings yet
- ECE2112_Formula (2)Document3 pagesECE2112_Formula (2)edb24498No ratings yet
- 07 GTO - IGBT - ConvertersDocument136 pages07 GTO - IGBT - Convertersriajul100% (1)
- DSP Control Loop DesignDocument24 pagesDSP Control Loop DesignVeljko TomaševićNo ratings yet
- Formulae_part_twoDocument2 pagesFormulae_part_twoAhmed NasifNo ratings yet
- Analysis Converter Buck BoostDocument5 pagesAnalysis Converter Buck Boostprakash2983100% (2)
- Sect2-3 PDFDocument10 pagesSect2-3 PDFBlaiseNo ratings yet
- Lecture 1Document17 pagesLecture 1amrsalah40820No ratings yet
- PROJECT-LOON by JumiDocument35 pagesPROJECT-LOON by JuminathmanojNo ratings yet
- WH ITd Ti Fdlza IXmmDocument36 pagesWH ITd Ti Fdlza IXmmSarinNo ratings yet
- Lesson 28 and 29 - Isentropic Flow With Area Change - Handout VersionDocument16 pagesLesson 28 and 29 - Isentropic Flow With Area Change - Handout VersionjacksayshiNo ratings yet
- Inverter Applications: - Motor DrivesDocument49 pagesInverter Applications: - Motor DrivesrajapeeeNo ratings yet
- Active Filter CircuitsDocument10 pagesActive Filter CircuitssightlesswarriorNo ratings yet
- OnSemi The TL431 in The Control of Switching Power Supplies PDFDocument63 pagesOnSemi The TL431 in The Control of Switching Power Supplies PDFFernando BotteronNo ratings yet
- ExamplesDocument19 pagesExamplesMs Noor ul AinNo ratings yet
- Chap 15Document18 pagesChap 15GagneNo ratings yet
- Power Electronics - Waveforms and FormulaeDocument13 pagesPower Electronics - Waveforms and Formulaegowtham15155No ratings yet
- Power Electronics Rectifier FundamentalsDocument59 pagesPower Electronics Rectifier FundamentalsTàu NguyễnNo ratings yet
- Lecture14 Ee474 Miller Ota PDFDocument22 pagesLecture14 Ee474 Miller Ota PDFShanNo ratings yet
- RC Filters: Certain Desirable Features Are RetainedDocument12 pagesRC Filters: Certain Desirable Features Are RetainedEngr Kashi YousafzaiNo ratings yet
- EIE Spectroscopy for Metal-Electrolyte InterfacesDocument23 pagesEIE Spectroscopy for Metal-Electrolyte InterfacesRonald BustamanteNo ratings yet
- The Inverter ReportDocument47 pagesThe Inverter Reportronaldbolorbaral8809No ratings yet
- DC-DC Conveters Lecture 5Document46 pagesDC-DC Conveters Lecture 5AMV STREAMNo ratings yet
- PPT Isolated DC-DC Converters (Benny Yeung)Document31 pagesPPT Isolated DC-DC Converters (Benny Yeung)Terry rickyNo ratings yet
- IC Design of Power Management Circuits (I)Document40 pagesIC Design of Power Management Circuits (I)tt_aljobory3911No ratings yet
- Tu0401switcherki2009isic 140121090158 Phpapp01Document128 pagesTu0401switcherki2009isic 140121090158 Phpapp01Udai ValluruNo ratings yet
- SEL 4283 Analog CMOS IC Design Single Stage Amplifiers: Small Signal Model 1Document52 pagesSEL 4283 Analog CMOS IC Design Single Stage Amplifiers: Small Signal Model 1jitendraNo ratings yet
- Lect 5 PLL 2Document18 pagesLect 5 PLL 2Trần Tấn ĐạiNo ratings yet
- TCAD Lecture3Document16 pagesTCAD Lecture3Thi NguyenNo ratings yet
- Power Electronics - Chapter 3Document50 pagesPower Electronics - Chapter 3av_00115240100% (8)
- Review Problems: 40 k Ω 4 kΩ Vo +Document16 pagesReview Problems: 40 k Ω 4 kΩ Vo +NajmoAdenNo ratings yet
- Phase Shift Circuit For CRT Displays: - QutlineDocument3 pagesPhase Shift Circuit For CRT Displays: - QutlineArie DinataNo ratings yet
- Lect 040Document5 pagesLect 040dheyaaNo ratings yet
- DC to AC Conversion Using InvertersDocument24 pagesDC to AC Conversion Using InvertersABHISHEK KUMARNo ratings yet
- Active Filter Circuits-2Document10 pagesActive Filter Circuits-2sightlesswarriorNo ratings yet
- Chapter 5 DC To DC Converters: OutlineDocument25 pagesChapter 5 DC To DC Converters: OutlinemadihaNo ratings yet
- Flyback Converter: J. FisherDocument16 pagesFlyback Converter: J. FisherDaniel NimabwayaNo ratings yet
- Current Mirrors: Ars DiavoloDocument50 pagesCurrent Mirrors: Ars Diavolopam_trNo ratings yet
- 03 Analog Electronics-IIDocument63 pages03 Analog Electronics-IINazmus SakibNo ratings yet
- ELECTRICITY Cheat Card 2 MinDocument1 pageELECTRICITY Cheat Card 2 Minoba182051No ratings yet
- CMOS AmplifiersDocument39 pagesCMOS AmplifiersLaura MendozaNo ratings yet
- Parallel Resonance-007Document10 pagesParallel Resonance-007MOHAMMAD FARDEEN SUMAIR 160419735020No ratings yet
- Mosfet Part 3Document24 pagesMosfet Part 3MUHAMMAD KHAIRUL ANUAR BIN JUHARI A22EE0178No ratings yet
- Single Phase Inverter 1Document9 pagesSingle Phase Inverter 1Zakaria ElbarbaryNo ratings yet
- 74HC4053 74HCT4053: 1. General DescriptionDocument33 pages74HC4053 74HCT4053: 1. General DescriptionbezasamiNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Reaction rate determination and simulation of hydrogenation processDocument3 pagesReaction rate determination and simulation of hydrogenation processToMemNo ratings yet
- Fda PDFDocument2 pagesFda PDFVictorNo ratings yet
- Caribbean Examinations Council Caribbean Secondary Certificate of Education Guidelines For On-Site Moderation SciencesDocument9 pagesCaribbean Examinations Council Caribbean Secondary Certificate of Education Guidelines For On-Site Moderation SciencesjokerNo ratings yet
- Week 6Document7 pagesWeek 6Nguyễn HoàngNo ratings yet
- Crash Cart - General Checklist For Medical Supplies On Crash CartsDocument3 pagesCrash Cart - General Checklist For Medical Supplies On Crash CartsYassen ManiriNo ratings yet
- Impact of Recruitment & Selection on Employee RetentionDocument39 pagesImpact of Recruitment & Selection on Employee RetentiongizawNo ratings yet
- Executive Education Portfolio Soft Copy-INSEADDocument58 pagesExecutive Education Portfolio Soft Copy-INSEADОля КусраеваNo ratings yet
- Main Hoon Na - WikipediaDocument8 pagesMain Hoon Na - WikipediaHusain ChandNo ratings yet
- Legal Research MethodsDocument10 pagesLegal Research MethodsCol Amit KumarNo ratings yet
- Call SANROCCO 11 HappybirthdayBramanteDocument8 pagesCall SANROCCO 11 HappybirthdayBramanterod57No ratings yet
- Lesson Plan 2018-2019 Term 1Document205 pagesLesson Plan 2018-2019 Term 1Athlyn DurandNo ratings yet
- Learning Online: Veletsianos, GeorgeDocument11 pagesLearning Online: Veletsianos, GeorgePsico XavierNo ratings yet
- Dell EMC VPLEX For All-FlashDocument4 pagesDell EMC VPLEX For All-Flashghazal AshouriNo ratings yet
- Delhi Public School: Class: XI Subject: Assignment No. 3Document1 pageDelhi Public School: Class: XI Subject: Assignment No. 3Aman Kumar BhagatNo ratings yet
- A Woman's Talent Is To Listen, Says The Vatican - Advanced PDFDocument6 pagesA Woman's Talent Is To Listen, Says The Vatican - Advanced PDFhahahapsuNo ratings yet
- 4 - Complex IntegralsDocument89 pages4 - Complex IntegralsryuzackyNo ratings yet
- PowerhouseDocument10 pagesPowerhouseRanjan DhungelNo ratings yet
- Classification of Textile Testing - OrDNURDocument6 pagesClassification of Textile Testing - OrDNURKazi ShorifNo ratings yet
- 277Document18 pages277Rosy Andrea NicolasNo ratings yet
- UT Dallas Syllabus For Ee3311.002.07f Taught by Gil Lee (Gslee)Document3 pagesUT Dallas Syllabus For Ee3311.002.07f Taught by Gil Lee (Gslee)UT Dallas Provost's Technology GroupNo ratings yet
- Interna Medicine RheumatologyDocument15 pagesInterna Medicine RheumatologyHidayah13No ratings yet
- Electrocardiography - Wikipedia, The Free EncyclopediaDocument18 pagesElectrocardiography - Wikipedia, The Free Encyclopediapayments8543No ratings yet
- Manju Philip CVDocument2 pagesManju Philip CVManju PhilipNo ratings yet
- Trove Research Carbon Credit Demand Supply and Prices 1 June 2021Document51 pagesTrove Research Carbon Credit Demand Supply and Prices 1 June 2021Ceren ArkancanNo ratings yet
- Levels of Attainment.Document6 pagesLevels of Attainment.rajeshbarasaraNo ratings yet
- The Etteilla Tarot: Majors & Minors MeaningsDocument36 pagesThe Etteilla Tarot: Majors & Minors MeaningsRowan G100% (1)
- 2.0 - SITHKOP002 - Plan and Cost Basic Menus Student GuideDocument92 pages2.0 - SITHKOP002 - Plan and Cost Basic Menus Student Guidebash qwertNo ratings yet
- Manual - Sentron Pac Profibus Do Modul - 2009 02 - en PDFDocument106 pagesManual - Sentron Pac Profibus Do Modul - 2009 02 - en PDFDante Renee Mendoza DelgadoNo ratings yet
- Hardware Purchase and Sales System Project ProfileDocument43 pagesHardware Purchase and Sales System Project Profilesanjaykumarguptaa100% (2)
- AP Euro Unit 2 Study GuideDocument11 pagesAP Euro Unit 2 Study GuideexmordisNo ratings yet