You might also like
- Transmission System of Gear BoxDocument86 pagesTransmission System of Gear BoxAmit Kumar Uke100% (4)
- Making A Spur GearDocument9 pagesMaking A Spur GearHaraprasad DolaiNo ratings yet
- Kenr6225 01Document68 pagesKenr6225 01Boris BabicNo ratings yet
- Route card for production process documentDocument1 pageRoute card for production process documentchandra100% (1)
- Rack and PinionDocument16 pagesRack and PinionjeronimoisraelNo ratings yet
- Gear Ratio Calculations PDFDocument4 pagesGear Ratio Calculations PDFrechingatuputamadreNo ratings yet
- Gearabc C PDFDocument40 pagesGearabc C PDFmgualdi100% (1)
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- SMP For Fluidizing Air BlowerDocument20 pagesSMP For Fluidizing Air BlowerSonrat100% (1)
- Automotive Fundamentals: Types of Automobile Layouts and Body StylesDocument53 pagesAutomotive Fundamentals: Types of Automobile Layouts and Body StylessebsrayNo ratings yet
- Parts VolvoDocument28 pagesParts VolvoJusman abdullah50% (2)
- Lecture 2. Types of Machine DrawingDocument19 pagesLecture 2. Types of Machine DrawingaddisudagneNo ratings yet
- SpringsDocument36 pagesSpringsMuhammad Rehan100% (1)
- Ar-Cutting Text PDFDocument394 pagesAr-Cutting Text PDFdgg3565No ratings yet
- Service Parts Manual: Series 40 M25 Axial Piston MotorDocument24 pagesService Parts Manual: Series 40 M25 Axial Piston Motorjose manuel barroso pantojaNo ratings yet
- Worm GearingDocument12 pagesWorm Gearinganon_590747615100% (3)
- Gear and Gear TrainDocument21 pagesGear and Gear Trainm_er100No ratings yet
- Gear IntroductionDocument17 pagesGear Introductionpatel ketan100% (1)
- Design of GearsDocument110 pagesDesign of GearsSomnath IngaleNo ratings yet
- Partlist SF Series PDFDocument36 pagesPartlist SF Series PDFsofyan100% (1)
- Machine Design & Drawing - II - GEARSDocument12 pagesMachine Design & Drawing - II - GEARSSenthil KumarNo ratings yet
- Design of Springs (Course-Notes)Document112 pagesDesign of Springs (Course-Notes)mOchONo ratings yet
- Gear shaping and shaving process overviewDocument22 pagesGear shaping and shaving process overviewSumesh Vijayan0% (1)
- Engine 3066 - Disassembly and Assembly (Supplemental Information)Document125 pagesEngine 3066 - Disassembly and Assembly (Supplemental Information)Miguel Leguizamón98% (44)
- Terminology SpurDocument3 pagesTerminology SpurNimish Pande100% (1)
- Gear ManufacturingDocument48 pagesGear ManufacturingJaideep SinghNo ratings yet
- Rating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDocument6 pagesRating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDavide MaranoNo ratings yet
- Power Screws: PPT Designed by Rahul Kumar Lakshkar 0808ME181045Document19 pagesPower Screws: PPT Designed by Rahul Kumar Lakshkar 0808ME181045Rahul LakshkarNo ratings yet
- International innovative industries final inspectionDocument1 pageInternational innovative industries final inspectionchandra100% (1)
- 5) ASTM A29 GR 4140 PDFDocument1 page5) ASTM A29 GR 4140 PDFchandraNo ratings yet
- 5) ASTM A29 GR 4140 PDFDocument1 page5) ASTM A29 GR 4140 PDFchandraNo ratings yet
- Design of Machine Tool Gearboxes Driven by Double Speed Electric MotorsDocument10 pagesDesign of Machine Tool Gearboxes Driven by Double Speed Electric Motorsabrez100% (1)
- Gears FundamentalDocument25 pagesGears FundamentalMOHD ZULHELMIE ZAINAL ABIDINNo ratings yet
- Gearmanufacturing MethodsDocument9 pagesGearmanufacturing Methodskumar pNo ratings yet
- Revue Technique Audi A4 B5 1997 2000Document1,323 pagesRevue Technique Audi A4 B5 1997 2000Datoman75% (4)
- Spur GearDocument67 pagesSpur GearJeky KurniawanNo ratings yet
- Manual de Partes Alzadora 2254 (2009) PDFDocument492 pagesManual de Partes Alzadora 2254 (2009) PDFAdolfo Montes MorenoNo ratings yet
- Gear DesignDocument83 pagesGear DesignmuhammadaminjamalmutNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute Gearing PDFDocument6 pagesCycloid Drive - Replaced by Planocentric Involute Gearing PDFMax GrandeNo ratings yet
- Toothed GearingDocument33 pagesToothed GearingpvkkrNo ratings yet
- Rack and Pinion Gears InformationDocument6 pagesRack and Pinion Gears InformationifyNo ratings yet
- Spur Gears - SlidesDocument45 pagesSpur Gears - SlidesKim Jeff BeringuelNo ratings yet
- SOP for CNC machine tool settingDocument2 pagesSOP for CNC machine tool settingchandraNo ratings yet
- Gear TerminologyDocument21 pagesGear TerminologyAns ahmed100% (1)
- Steering Universal JointsDocument11 pagesSteering Universal JointsAman JainNo ratings yet
- Design and Analysis of Planetary Gearbox For All-Terrain VehicleDocument10 pagesDesign and Analysis of Planetary Gearbox For All-Terrain VehicleIJRASETPublications100% (1)
- 2022-04-12 Inner Finisher-H1 Partscatalog EDocument51 pages2022-04-12 Inner Finisher-H1 Partscatalog Emichael ourdanNo ratings yet
- Machine Shaft Design GuideDocument48 pagesMachine Shaft Design GuideHammad RazaNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute GearingDocument6 pagesCycloid Drive - Replaced by Planocentric Involute GearingMax GrandeNo ratings yet
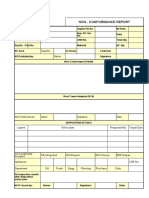
- Non Conformance ReportDocument1 pageNon Conformance ReportchandraNo ratings yet
- Automatic Car Parking - Project ReportDocument35 pagesAutomatic Car Parking - Project ReportTanvi Khurana50% (2)
- Screwthread and Gear MeasurementDocument19 pagesScrewthread and Gear MeasurementseenuNo ratings yet
- BC15 18S-5 20SC-5 (Sb1087e08) PDFDocument260 pagesBC15 18S-5 20SC-5 (Sb1087e08) PDFGORDNo ratings yet
- Types of GearDocument6 pagesTypes of GearMira EvaNo ratings yet
- Gear Teeth: Clocks and ShipsDocument16 pagesGear Teeth: Clocks and ShipsČika BrkoNo ratings yet
- Characteristics of Trochoids and Their Application To Determining Gear Teeth Fillet ShapesDocument14 pagesCharacteristics of Trochoids and Their Application To Determining Gear Teeth Fillet ShapesJohn FelemegkasNo ratings yet
- Final ReportDocument45 pagesFinal ReportKuppu Raj100% (1)
- Gears and Gear TrainsDocument127 pagesGears and Gear TrainsVikki KotaNo ratings yet
- The Application of Bevel GearsDocument6 pagesThe Application of Bevel GearsPrasanth ThiagarajanNo ratings yet
- Tseng 2004 Mechanism and Machine TheoryDocument15 pagesTseng 2004 Mechanism and Machine TheoryKhanh VqNo ratings yet
- Design of Bevel and Worm Gear: Machine Element IIDocument60 pagesDesign of Bevel and Worm Gear: Machine Element IIkibromgidey12No ratings yet
- Gear Guide 060817Document40 pagesGear Guide 060817Vivek AbrolNo ratings yet
- 5.2 Flanged Bolt CouplingDocument11 pages5.2 Flanged Bolt CouplingShayneBumatay0% (1)
- Unit - V: Manufacturing TechnologyDocument54 pagesUnit - V: Manufacturing TechnologyIjanSahrudinNo ratings yet
- Screw Thread MeasurementsDocument77 pagesScrew Thread MeasurementsSridhar SreeNo ratings yet
- Spur Gear Design 1Document16 pagesSpur Gear Design 1Nagu SriramaNo ratings yet
- Machine Design Lec3Document75 pagesMachine Design Lec3sam0415No ratings yet
- Shaft DesignDocument33 pagesShaft DesignMunawwar Abbas0% (1)
- Types of Screw Threads and PointsDocument1 pageTypes of Screw Threads and Pointskeyur1109100% (1)
- Mechanical Design of Machine Elements-CouplingDocument10 pagesMechanical Design of Machine Elements-CouplingDepoel Like Soto DigelasNo ratings yet
- 4363 111 Machine Design IDocument6 pages4363 111 Machine Design Iyogesh_b_k100% (2)
- Design calculations for worm gearDocument3 pagesDesign calculations for worm gearVenkateswaran venkateswaranNo ratings yet
- ZEIT3700 Notes Gearing 1Document6 pagesZEIT3700 Notes Gearing 1ghufran015580No ratings yet
- GEAR AND GEAR TRAINDocument23 pagesGEAR AND GEAR TRAINingridNo ratings yet
- 06 GearsDocument22 pages06 GearsTeaching ClubNo ratings yet
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Document8 pagesGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- Laser Cutting StartupDocument5 pagesLaser Cutting StartupchandraNo ratings yet
- Batch Processing Document PP-FR-01Document1 pageBatch Processing Document PP-FR-01chandraNo ratings yet
- 3) ASTM A29 GR 1040 PDFDocument1 page3) ASTM A29 GR 1040 PDFchandraNo ratings yet
- m2 200i Plasma Consumables Selection Matrix V0 27022019Document2 pagesm2 200i Plasma Consumables Selection Matrix V0 27022019chandra100% (1)
- PP-FR-02 Configuration Check ListDocument1 pagePP-FR-02 Configuration Check ListchandraNo ratings yet
- Technical Comparision of Cutting MachineDocument6 pagesTechnical Comparision of Cutting MachinechandraNo ratings yet
- Master list of WPS and PQR documentsDocument6 pagesMaster list of WPS and PQR documentschandraNo ratings yet
- Breakage FormDocument1 pageBreakage FormchandraNo ratings yet
- CDA/UNS Grade C954 Aluminium Bronze Material Data SheetDocument1 pageCDA/UNS Grade C954 Aluminium Bronze Material Data SheetchandraNo ratings yet
- 4) ASTM A29 GR 4130 PDFDocument1 page4) ASTM A29 GR 4130 PDFchandraNo ratings yet
- 3) ASTM A29 GR 1040 PDFDocument1 page3) ASTM A29 GR 1040 PDFchandraNo ratings yet
- CDA/UNS Grade C954 Aluminium Bronze Material Data SheetDocument1 pageCDA/UNS Grade C954 Aluminium Bronze Material Data SheetchandraNo ratings yet
- 4) ASTM A29 GR 4130 PDFDocument1 page4) ASTM A29 GR 4130 PDFchandraNo ratings yet
- International Innovative Industries Gate Pass: Employee Name: DateDocument1 pageInternational Innovative Industries Gate Pass: Employee Name: DatechandraNo ratings yet
- Stylus RequirementsDocument2 pagesStylus RequirementschandraNo ratings yet
- Painting Inspection RecordDocument1 pagePainting Inspection RecordchandraNo ratings yet
- Welding Machine ComparisionDocument4 pagesWelding Machine ComparisionchandraNo ratings yet
- FCAWDocument2 pagesFCAWchandraNo ratings yet
- Breakage FormDocument1 pageBreakage FormchandraNo ratings yet
- Laser Cutting StartupDocument5 pagesLaser Cutting StartupchandraNo ratings yet
- FCAWDocument2 pagesFCAWchandraNo ratings yet
- Internatinal INNOVATIVE Industries: Visual Inspection ReportDocument1 pageInternatinal INNOVATIVE Industries: Visual Inspection ReportchandraNo ratings yet
- Aws Certificate RenwalDocument1 pageAws Certificate RenwalchandraNo ratings yet
- Robotic Welding Machine Procedure: 5.0 Activies Perior To Machine Start UpDocument4 pagesRobotic Welding Machine Procedure: 5.0 Activies Perior To Machine Start UpchandraNo ratings yet
- Libble EuDocument616 pagesLibble EuKeiderNo ratings yet
- ClutchesDocument22 pagesClutchesravi100% (1)
- Copia de Sales List - Surplus Rotables - Batch-4Document20 pagesCopia de Sales List - Surplus Rotables - Batch-4MarcoNo ratings yet
- 60RT-MM Parts (265753)Document17 pages60RT-MM Parts (265753)Хелфор УкраинаNo ratings yet
- Cleveland Wheel HalfDocument92 pagesCleveland Wheel HalfAlexander Atoche RodasNo ratings yet
- F9.9JMH'13 F9.9je'13: (6DR1) (6DR1)Document62 pagesF9.9JMH'13 F9.9je'13: (6DR1) (6DR1)JorjNo ratings yet
- 4TN84L Rba-B50 1Document39 pages4TN84L Rba-B50 1tnvd420No ratings yet
- Assistant Motor Vehicle InspectorDocument4 pagesAssistant Motor Vehicle InspectorAbhijith RamachandranNo ratings yet
- Kyron + Actyon - LTG (060303) - 2despieceDocument123 pagesKyron + Actyon - LTG (060303) - 2despiececherokewagNo ratings yet
- Book 1Document22 pagesBook 1Arpit ShuklaNo ratings yet
- Essen Deinki: 22, Industrial Area, Phase-II, Chandigarh-160002 Tel: 0172-2653111-115, Fax: 0172-2653106Document15 pagesEssen Deinki: 22, Industrial Area, Phase-II, Chandigarh-160002 Tel: 0172-2653111-115, Fax: 0172-2653106saurabhNo ratings yet
- Clarks Technical Product Catalogue 2023Document96 pagesClarks Technical Product Catalogue 2023n8wf7dhk4vNo ratings yet
- E&I Tool Box ContentsDocument1 pageE&I Tool Box ContentsChandan RayNo ratings yet
- Summarize - SCREWDRIVER, FIXTURE AT LUCIDDocument84 pagesSummarize - SCREWDRIVER, FIXTURE AT LUCIDVinhNo ratings yet
- DAWN 150 SM Manual de TallerDocument300 pagesDAWN 150 SM Manual de Tallerkamil motorsNo ratings yet
- T12+ Wiring-DiagramDocument13 pagesT12+ Wiring-Diagramktriantafillidis5No ratings yet
- 392C Torque Multiplier Parts ListDocument2 pages392C Torque Multiplier Parts Listvipequi50No ratings yet
- Apin Outstanding Order As of 291216Document131 pagesApin Outstanding Order As of 291216Maman SugawaNo ratings yet