You might also like
- PE Lecture No.9Document19 pagesPE Lecture No.9Novia EndriNo ratings yet
- DC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperDocument18 pagesDC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperSaif UddinNo ratings yet
- EEE Lab ManualDocument26 pagesEEE Lab ManualPrabin RoyNo ratings yet
- Chopper Basic PDFDocument12 pagesChopper Basic PDFSoumya DuttaNo ratings yet
- Experiment 5 Integrator, Differentiator and Non-Linear Properties of OpampsDocument7 pagesExperiment 5 Integrator, Differentiator and Non-Linear Properties of OpampsEnes AyduranNo ratings yet
- Tutorial 1 - Basic Concepts in Power ElectronicsDocument7 pagesTutorial 1 - Basic Concepts in Power ElectronicsJohn Appleseed100% (1)
- LAB 11-PE-LabDocument10 pagesLAB 11-PE-LabLovely JuttNo ratings yet
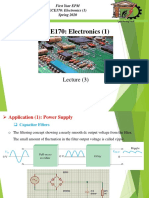
- ECE170: Electronics (1) : LectureDocument40 pagesECE170: Electronics (1) : LectureKhaled MohamedNo ratings yet
- Design Example IntusoftDocument6 pagesDesign Example IntusoftCataNo ratings yet
- Electronic Device and CircuitsDocument121 pagesElectronic Device and Circuitssanthosh216eeeNo ratings yet
- Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationDocument69 pagesImproved Power Quality AC-DC Converters With High Frequency Transformer IsolationZlatian RaduNo ratings yet
- Maximum Power Point Tracking For Wind Energy Conversion System of Doubly Fed Induction Generator Using Z-Source InverterDocument6 pagesMaximum Power Point Tracking For Wind Energy Conversion System of Doubly Fed Induction Generator Using Z-Source InverterManoj KumarNo ratings yet
- EDC MaterialDocument49 pagesEDC Materialhard.worker123hwNo ratings yet
- Swarna Fina TecghDocument38 pagesSwarna Fina TecghKundanam VenkateshNo ratings yet
- Exp 2Document6 pagesExp 2College ISMNo ratings yet
- EE 5021: Power Converter Analysis and Design Sept2020-Jan2021 Assignment 3Document3 pagesEE 5021: Power Converter Analysis and Design Sept2020-Jan2021 Assignment 3Raj JhaNo ratings yet
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor lifeNo ratings yet
- Simulation of Single Phase Full Bridge Converter Using LTspiceDocument9 pagesSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daNo ratings yet
- CUK ConverterDocument4 pagesCUK Converterranjitheee1292No ratings yet
- Controlled Rectifications: Wave, Controlled Rectifier Loaded With A Resistive Load - Phase, Half - Ingle 1. SDocument11 pagesControlled Rectifications: Wave, Controlled Rectifier Loaded With A Resistive Load - Phase, Half - Ingle 1. SAbd Alkader AlwerNo ratings yet
- Small-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMDocument8 pagesSmall-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMAslı ÇakırNo ratings yet
- Signal Generator Project StatementDocument16 pagesSignal Generator Project StatementHussain Bin AliNo ratings yet
- PE Lecture No 03Document12 pagesPE Lecture No 03Getnet YilfuNo ratings yet
- Choppers and Cyclo ConvertersDocument12 pagesChoppers and Cyclo ConvertersPaul MatshonaNo ratings yet
- Ece Vii Power Electronics (10ec73) AssignmentDocument6 pagesEce Vii Power Electronics (10ec73) AssignmentThomas PriceNo ratings yet
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- GATE (1991-2010) Solved Papers EEDocument261 pagesGATE (1991-2010) Solved Papers EEqwer0% (1)
- شيت مختبر الكترونيك القدرة 2 PDFDocument21 pagesشيت مختبر الكترونيك القدرة 2 PDFMustafa MhmoodNo ratings yet
- Buck ConverterDocument8 pagesBuck Converterhamza abdo mohamoudNo ratings yet
- Power Electronics Questions AnswersDocument59 pagesPower Electronics Questions AnswersPascal UZABAKIRIHONo ratings yet
- Assignment2 NewdocxDocument3 pagesAssignment2 NewdocxAstinSohnNo ratings yet
- Sem 3 Module 2Document5 pagesSem 3 Module 2shubhendra2No ratings yet
- Mid Sem ExamDocument2 pagesMid Sem ExamPiyush MaheshwariNo ratings yet
- Chapter 2 (Chopper)Document14 pagesChapter 2 (Chopper)Zaf FiNo ratings yet
- Vco WDocument8 pagesVco Wapi-3725139No ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- T S Ia SDocument7 pagesT S Ia S1nshsankritNo ratings yet
- Dioda Beban RDocument10 pagesDioda Beban RDamar Putra BriliawanNo ratings yet
- Chapter 3 - Single Phase InverterDocument20 pagesChapter 3 - Single Phase InverterMuhammad Izz IzzuddinNo ratings yet
- Relation Between V and V in Continuous Conduction: EE462L, Power Electronics, DC-DC Buck ConverterDocument16 pagesRelation Between V and V in Continuous Conduction: EE462L, Power Electronics, DC-DC Buck Converterbill gatesNo ratings yet
- Aec AssignmentDocument14 pagesAec AssignmentAnnu YadavNo ratings yet
- TransformerDocument52 pagesTransformerorangramaiNo ratings yet
- Power 4Document27 pagesPower 4ayman aminNo ratings yet
- DET40073 - Topic 3Document97 pagesDET40073 - Topic 3KuhaanProNo ratings yet
- PEC Exercices Complete 22-23Document6 pagesPEC Exercices Complete 22-23Diego Garcia De VegaNo ratings yet
- DC-DC ConverterDocument6 pagesDC-DC ConverterAlecsandra RusuNo ratings yet
- Lecture 9 - Phase Controlled AC-DC Converters PDFDocument41 pagesLecture 9 - Phase Controlled AC-DC Converters PDFaswardiNo ratings yet
- Unit Ii Rectifiers & FiltersDocument26 pagesUnit Ii Rectifiers & FiltersRegine LamayoNo ratings yet
- Lab3 DC Power Supply Design1588856969Document3 pagesLab3 DC Power Supply Design1588856969badalabhinav10No ratings yet
- Unit6 PDFDocument27 pagesUnit6 PDFMitesh KalaniNo ratings yet
- Flyback PDFDocument11 pagesFlyback PDFlucianoNo ratings yet
- DC-DC Converter BasicsDocument15 pagesDC-DC Converter BasicsmsholihulhadiNo ratings yet
- DC To AC InverterDocument5 pagesDC To AC InverterRexy RamadhanNo ratings yet
- Power Converters LabDocument53 pagesPower Converters LabK Kiran VishnuNo ratings yet
- ENGG 184.12 Lab Activity 4 - Manlapaz & DolalasDocument3 pagesENGG 184.12 Lab Activity 4 - Manlapaz & DolalasJuan Glicerio C. ManlapazNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- CoseDocument1 pageCoseNikhil GobhilNo ratings yet
- PythagorasDocument27 pagesPythagorasNikhil GobhilNo ratings yet
- SYLLABUS 4thSEMDocument6 pagesSYLLABUS 4thSEMNikhil GobhilNo ratings yet
- SYLLABUS 4thSEMDocument6 pagesSYLLABUS 4thSEMNikhil GobhilNo ratings yet
- Syllabus CBCS III IV 27.09.19 PDFDocument51 pagesSyllabus CBCS III IV 27.09.19 PDFहर्ष सौदर्शनNo ratings yet
- SineDocument18 pagesSineNikhil GobhilNo ratings yet
- TanDocument3 pagesTanNikhil GobhilNo ratings yet
- Assistant Prof. - Comp. Sc. Engg. 21.10.19Document3 pagesAssistant Prof. - Comp. Sc. Engg. 21.10.19Nikhil GobhilNo ratings yet
- Letter of DSW29.08.18Document1 pageLetter of DSW29.08.18Nikhil GobhilNo ratings yet
- Comparison Between Network Topologies PDFDocument2 pagesComparison Between Network Topologies PDFNikhil Gobhil100% (1)
- Cbcs Ug Integrated Ug/Pg Pre-Phd Course Work B.A. M.A. PH.DDocument4 pagesCbcs Ug Integrated Ug/Pg Pre-Phd Course Work B.A. M.A. PH.DNikhil GobhilNo ratings yet
- Difference NotesDocument1 pageDifference NotesNikhil GobhilNo ratings yet
- List of Holidays 2019 06.12.18 PDFDocument4 pagesList of Holidays 2019 06.12.18 PDFAditi SinghNo ratings yet
- I/O Basics: Ports Data, Control, and Status BitsDocument11 pagesI/O Basics: Ports Data, Control, and Status BitsNikhil GobhilNo ratings yet
- 1548286489kvs National Incentige Award 2018Document11 pages1548286489kvs National Incentige Award 2018Nikhil GobhilNo ratings yet
- ch3 5 v1Document18 pagesch3 5 v1مشاهير celebritiesNo ratings yet
- New Doc 2Document1 pageNew Doc 2Nikhil GobhilNo ratings yet
- Introduction To Digital Logic DesignDocument30 pagesIntroduction To Digital Logic DesignNikhil GobhilNo ratings yet
- Student Fee ReportDocument7 pagesStudent Fee ReportNikhil GobhilNo ratings yet
- SRK 34Document1 pageSRK 34Nikhil GobhilNo ratings yet
- CH 3Document30 pagesCH 3FathimaNo ratings yet
- National Institute of Technology, Raipur: Course of Study and Scheme of Examination of B.Tech/B.Arch/M.Tech/M.C.ADocument11 pagesNational Institute of Technology, Raipur: Course of Study and Scheme of Examination of B.Tech/B.Arch/M.Tech/M.C.ANikhil GobhilNo ratings yet
- CSE V. VI - SemDocument12 pagesCSE V. VI - SemNikhil GobhilNo ratings yet
- Csvtu Syllabus Be Cse 4 SemDocument12 pagesCsvtu Syllabus Be Cse 4 SemNikhil Gobhil0% (1)
- Scholarship Notificion PDFDocument1 pageScholarship Notificion PDFNikhil GobhilNo ratings yet
- Ied Unit3 Lecture2Document6 pagesIed Unit3 Lecture2Nikhil GobhilNo ratings yet
- Cse III, IV, SemDocument12 pagesCse III, IV, SemNikhil GobhilNo ratings yet
- V" L/ VJS: I - Q"S - Ggry, (Ilo - L!Document1 pageV" L/ VJS: I - Q"S - Ggry, (Ilo - L!Nikhil GobhilNo ratings yet
- Viva Voce Newton RingDocument7 pagesViva Voce Newton RingPintuabc100% (1)
- Ied Unit3 Lecture2Document43 pagesIed Unit3 Lecture2Nikhil GobhilNo ratings yet
- 487.4-2013 Standard For The Electrical Protection of Communication Facilities Serving Electric Supply Locations Through The Use of Neutralizing TransformersDocument55 pages487.4-2013 Standard For The Electrical Protection of Communication Facilities Serving Electric Supply Locations Through The Use of Neutralizing Transformersjose eduardo mejia sanchezNo ratings yet
- Encorp Group ServicesDocument26 pagesEncorp Group ServicesVinay NowalNo ratings yet
- UsingtheLuciaJigforAccurateBite S220Document115 pagesUsingtheLuciaJigforAccurateBite S220Naunit VaidNo ratings yet
- ChemiTek SOLARWASHPROTECT DATASHEETDocument2 pagesChemiTek SOLARWASHPROTECT DATASHEETPhani ArvapalliNo ratings yet
- Environmental Impact Assessment by L.W. CanterDocument38 pagesEnvironmental Impact Assessment by L.W. CanterDewi Hadiwinoto33% (9)
- Parts C490BPGDocument30 pagesParts C490BPGניקולאי איןNo ratings yet
- Plate Heat Exchanger Model M15-MFG - ASTM B265 Gr1 TitaniumDocument1 pagePlate Heat Exchanger Model M15-MFG - ASTM B265 Gr1 TitaniumCardoso MalacaoNo ratings yet
- Ped PreviousDocument12 pagesPed PreviousRahul GogoiNo ratings yet
- Worldpremium: AC-250M/156-60S AC-255M/156-60S AC-260M/156-60SDocument2 pagesWorldpremium: AC-250M/156-60S AC-255M/156-60S AC-260M/156-60SSeptimiu BotaNo ratings yet
- EAM Building Business Case For The Executive - Aberdeen - GroupDocument15 pagesEAM Building Business Case For The Executive - Aberdeen - GroupBlaz BregarNo ratings yet
- Properties of Fluids NotesDocument14 pagesProperties of Fluids NotesMavineNo ratings yet
- Climbing Film EvaporatorDocument8 pagesClimbing Film Evaporatorsaz140% (1)
- Maxiforce CatalogDocument525 pagesMaxiforce CatalogVenzon SotNo ratings yet
- Urban - Visions - SUP2ER Project 8 - PlannerDocument14 pagesUrban - Visions - SUP2ER Project 8 - Plannersamanisbest553No ratings yet
- 5 - Tank Itp - Inspection & Test Plan For TanksDocument10 pages5 - Tank Itp - Inspection & Test Plan For TanksAhmed Hassan100% (2)
- BSCH User ManualDocument20 pagesBSCH User Manualjo_eli_No ratings yet
- UBL3&4 E 0 G0 ES AA0 002P - R3 - Color Schedule For Power PlantDocument12 pagesUBL3&4 E 0 G0 ES AA0 002P - R3 - Color Schedule For Power PlantAdvent ManurungNo ratings yet
- Single Plane Balance 091401Document16 pagesSingle Plane Balance 091401ridzim4638No ratings yet
- Fundamentals of HV Circuit-BreakersDocument22 pagesFundamentals of HV Circuit-BreakersBastian OspinaNo ratings yet
- Form 1 AWS D1.1Document2 pagesForm 1 AWS D1.1Bui Chi TamNo ratings yet
- 09 MaschinenfabrikReinhausen On LoadTap ChangerDocument28 pages09 MaschinenfabrikReinhausen On LoadTap Changerhardian syaputraNo ratings yet
- 70627-Fault Codes Identification StandardDocument26 pages70627-Fault Codes Identification StandardNovie Rizky71% (7)
- Ductile-Brittle Transition Temperature and Impact Energy Tests - Yena EngineeringDocument7 pagesDuctile-Brittle Transition Temperature and Impact Energy Tests - Yena EngineeringKASHFI UDDINNo ratings yet
- Yihong Qiu, Yisheng Chen, Geoff G.Z. Zhang, Lawrence Yu, Rao v. Mantri (Eds.) - Developing Solid Oral Dosage Forms - Pharmaceutical Theory and Practice-Academic Press (2016) - 166-190Document25 pagesYihong Qiu, Yisheng Chen, Geoff G.Z. Zhang, Lawrence Yu, Rao v. Mantri (Eds.) - Developing Solid Oral Dosage Forms - Pharmaceutical Theory and Practice-Academic Press (2016) - 166-190unnik06No ratings yet
- Surge Suppression Air ValvesDocument2 pagesSurge Suppression Air ValvesjyothiprakashNo ratings yet
- Experiment #8 Title: Power Factor Correction: II. Wiring CircuitDocument13 pagesExperiment #8 Title: Power Factor Correction: II. Wiring CircuitNesleeNo ratings yet
- Looksfam EngineersDocument70 pagesLooksfam EngineersJohn PingkianNo ratings yet
- Magnetism PDFDocument4 pagesMagnetism PDFNiksslpadaNo ratings yet
- Alkylation PDFDocument7 pagesAlkylation PDFVasthadu Vasu Khanan DLNo ratings yet
- 825 Series 190CC Motor BriggsDocument27 pages825 Series 190CC Motor BriggsCTRL ENGENHARIA E MANUTENÇÃO ComprasNo ratings yet