You might also like
- Model-Driven Online Capacity Management for Component-Based Software SystemsFrom EverandModel-Driven Online Capacity Management for Component-Based Software SystemsNo ratings yet
- SE20-Schedulability Analysis of Global Scheduling Algorithms On Multiprocessor PlatformsDocument14 pagesSE20-Schedulability Analysis of Global Scheduling Algorithms On Multiprocessor PlatformsB.v. SubbaraoNo ratings yet
- Parallel Real-Time Scheduling of DagsDocument16 pagesParallel Real-Time Scheduling of DagsMayra EstradaNo ratings yet
- Scheduling in Distributed SystemsDocument9 pagesScheduling in Distributed SystemsArjun HajongNo ratings yet
- Multiprocessor Scheduling Using Task Duplication Based Scheduling Algorithms: A Review PaperDocument7 pagesMultiprocessor Scheduling Using Task Duplication Based Scheduling Algorithms: A Review PaperInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Articulo 0009 Ya NeetDocument28 pagesArticulo 0009 Ya NeetLeugimZerONo ratings yet
- Optimum and Heuristic Data Path Scheduling Under Resource Constraints?Document6 pagesOptimum and Heuristic Data Path Scheduling Under Resource Constraints?ChiragNo ratings yet
- Federated Scheduling DAG Tasks Capacity Augmentation Bounds 2Document12 pagesFederated Scheduling DAG Tasks Capacity Augmentation Bounds 2johnnyNo ratings yet
- CSEIJ020601Document16 pagesCSEIJ020601cseijNo ratings yet
- Experimental Study On Time and Space Sharing On The PowerxplorerDocument8 pagesExperimental Study On Time and Space Sharing On The PowerxplorerUsman TariqNo ratings yet
- Chapter OneDocument9 pagesChapter OnesalehNo ratings yet
- Chapter 5 (1) AntDocument14 pagesChapter 5 (1) AntDr-Shailendra YadavNo ratings yet
- RL SchedulingDocument25 pagesRL Schedulingofaofa1No ratings yet
- An Owner-Centric Metric For The Evaluation of Online Job SchedulesDocument13 pagesAn Owner-Centric Metric For The Evaluation of Online Job SchedulesssfofoNo ratings yet
- Comparative Study of Scheduling Algorithms For Real Time EnvironmentDocument4 pagesComparative Study of Scheduling Algorithms For Real Time EnvironmentSreedhar NagavellyNo ratings yet
- Batch Systems Optimal Scheduling and Processor OptDocument6 pagesBatch Systems Optimal Scheduling and Processor Optrandomrandom221No ratings yet
- TMP 3135Document13 pagesTMP 3135FrontiersNo ratings yet
- An Owner-Centric Metric For The Evaluation of Online Job SchedulesDocument13 pagesAn Owner-Centric Metric For The Evaluation of Online Job SchedulesssfofoNo ratings yet
- Combined Scheduling of Hard and Soft Real-Time Tasks in Multiprocessor SystemsDocument10 pagesCombined Scheduling of Hard and Soft Real-Time Tasks in Multiprocessor SystemsthotalnNo ratings yet
- Emulations, Scheduling and PatternsDocument30 pagesEmulations, Scheduling and PatternsAnisorac VasileNo ratings yet
- Operating System Issues and ApplicationsDocument12 pagesOperating System Issues and Applicationshaani104No ratings yet
- Efficiency Enhancing Resource Scheduling Strategies in Cloud ComputingDocument3 pagesEfficiency Enhancing Resource Scheduling Strategies in Cloud ComputingInternational Journal of Engineering and TechniquesNo ratings yet
- Survey On MultiCore Operation SystemsDocument9 pagesSurvey On MultiCore Operation SystemsMuhammad TalalNo ratings yet
- Reference Paper 1Document10 pagesReference Paper 1Sailesh KhandelwalNo ratings yet
- Linux Scheduler and Scheduling TechniquesDocument8 pagesLinux Scheduler and Scheduling TechniquesnausicaatetooNo ratings yet
- Scheduling Hard Real-Time Tasks On Multi-Core Using Intelligent Rate-MonotonicDocument5 pagesScheduling Hard Real-Time Tasks On Multi-Core Using Intelligent Rate-MonotonicAdel MiskiNo ratings yet
- Scheduling SC CamraReady PDFDocument16 pagesScheduling SC CamraReady PDFFlorin PopNo ratings yet
- Programming AlgorithmsDocument13 pagesProgramming AlgorithmsMandlendy OtisNo ratings yet
- Generating A Periodic Pattern For VLIWDocument18 pagesGenerating A Periodic Pattern For VLIWanon_817055971No ratings yet
- Partitioned Real-Time Scheduling For Preventing Information Leakage 221116 131642Document13 pagesPartitioned Real-Time Scheduling For Preventing Information Leakage 221116 131642NIPUN PETKARNo ratings yet
- Batch Queue Resource Scheduling For Workflow ApplicationsDocument10 pagesBatch Queue Resource Scheduling For Workflow Applicationstatjana zamarinNo ratings yet
- Scheduling Elastic Applications in Compositional Real-Time SystemsDocument8 pagesScheduling Elastic Applications in Compositional Real-Time Systemsguezaki6636No ratings yet
- A Processor Mapping Strategy For Processor Utilization in A Heterogeneous Distributed SystemDocument8 pagesA Processor Mapping Strategy For Processor Utilization in A Heterogeneous Distributed SystemJournal of ComputingNo ratings yet
- Seppanen 2014 - A Comparison of Takt Time and LBMS Planning MethodsDocument12 pagesSeppanen 2014 - A Comparison of Takt Time and LBMS Planning MethodsMichellgutierrez7833No ratings yet
- Operating Systems: Literature Review On Scheduling Algorithms of Operating SystemDocument12 pagesOperating Systems: Literature Review On Scheduling Algorithms of Operating SystemTeja PeddiNo ratings yet
- A New Round Robin Based Scheduling Algorithm For Operating Systems: Dynamic Quantum Using The Mean Average. by Abbass NooNDocument6 pagesA New Round Robin Based Scheduling Algorithm For Operating Systems: Dynamic Quantum Using The Mean Average. by Abbass NooNmaythuxNo ratings yet
- Period Selection For Integrated Controller Tasks in Cyber-Physical SystemsDocument9 pagesPeriod Selection For Integrated Controller Tasks in Cyber-Physical SystemshassanalabasiNo ratings yet
- Workflow Management System in Public Clouds Using Time LimitsDocument4 pagesWorkflow Management System in Public Clouds Using Time LimitserpublicationNo ratings yet
- Emulations, Scheduling and PatternsDocument30 pagesEmulations, Scheduling and Patternstt_aljobory3911No ratings yet
- Experiencing With Agapé-Tr: A Simulation Tool For Local Real-Time SchedulingDocument10 pagesExperiencing With Agapé-Tr: A Simulation Tool For Local Real-Time SchedulingGWNo ratings yet
- A Task Scheduling Algorithm With Improved Makespan Based On Prediction of Tasks Computation Time Algorithm For Cloud ComputingDocument11 pagesA Task Scheduling Algorithm With Improved Makespan Based On Prediction of Tasks Computation Time Algorithm For Cloud Computingakshay ambekarNo ratings yet
- Engineering Journal::An Efficient Mapreduce Scheduling Algorithm in HadoopDocument7 pagesEngineering Journal::An Efficient Mapreduce Scheduling Algorithm in HadoopEngineering JournalNo ratings yet
- TYPES OF SCHEDULING ALGORITHMS in CloudDocument4 pagesTYPES OF SCHEDULING ALGORITHMS in CloudDeepika MathuvanthiNo ratings yet
- Energy Aware Scheduling For Distributed Real-Time SystemsDocument9 pagesEnergy Aware Scheduling For Distributed Real-Time SystemsbabarirfanaliNo ratings yet
- Ijait 020602Document12 pagesIjait 020602ijaitjournalNo ratings yet
- SPPU High Performance ComputingDocument12 pagesSPPU High Performance ComputingGovind RajputNo ratings yet
- Benefits of Global Grid Computing For Job Scheduling: Carsten Ernemann, Volker Hamscher, Ramin YahyapourDocument6 pagesBenefits of Global Grid Computing For Job Scheduling: Carsten Ernemann, Volker Hamscher, Ramin YahyapourRoba AlnajjarNo ratings yet
- Article7 DAG OriginalDocument20 pagesArticle7 DAG OriginalhelinNo ratings yet
- Schedule 6Document7 pagesSchedule 6ssfofoNo ratings yet
- Mapreduce Workload For Dynamic Job Ordering and Slot ConfigurationDocument4 pagesMapreduce Workload For Dynamic Job Ordering and Slot ConfigurationInternational Journal of Engineering and TechniquesNo ratings yet
- Realizing Compositional Scheduling Through VirtualizationDocument10 pagesRealizing Compositional Scheduling Through VirtualizationVeera Kumar AkNo ratings yet
- Scheduling Unrelated Parallel Machines with Sequence-Dependent Setup TimesDocument10 pagesScheduling Unrelated Parallel Machines with Sequence-Dependent Setup TimesOlivia brianneNo ratings yet
- Low-Complexity Task Scheduling for Heterogeneous SystemsDocument15 pagesLow-Complexity Task Scheduling for Heterogeneous SystemsAyushAwasthiNo ratings yet
- Steal Tree: Low-Overhead Tracing of Work Stealing SchedulersDocument12 pagesSteal Tree: Low-Overhead Tracing of Work Stealing SchedulersAhilyaNo ratings yet
- Aloocatin Future ScopeDocument5 pagesAloocatin Future ScopejorisdudaNo ratings yet
- Provably Efficient Scheduling For Languages With Fine-Grained ParallelismDocument41 pagesProvably Efficient Scheduling For Languages With Fine-Grained ParallelismAnonymous RrGVQjNo ratings yet
- Improving The Performance of Local Real-Time Scheduling: Gabriel A. WainerDocument6 pagesImproving The Performance of Local Real-Time Scheduling: Gabriel A. WainerGWNo ratings yet
- Scheduling Multithread Computations by Stealing WorkDocument28 pagesScheduling Multithread Computations by Stealing Workwmeister31No ratings yet
- p34 WongDocument10 pagesp34 WongDavide Carmichael DoninelliNo ratings yet
- Schedule Optimization Using Fuzzy InferenceDocument6 pagesSchedule Optimization Using Fuzzy InferenceBomBomNo ratings yet
- Programming Puzzles Solutions GuideDocument48 pagesProgramming Puzzles Solutions GuideSahitram Kumar50% (6)
- Adders With Logical Optimization in FPGADocument10 pagesAdders With Logical Optimization in FPGAnalevihtkasNo ratings yet
- Cse Lab Manual MicroprocessorDocument52 pagesCse Lab Manual MicroprocessorDr-Engr ShahMurtaza RashidAl MasudNo ratings yet
- DCT Based Secure Data Hiding For Intellectual Property Right ProtectionDocument6 pagesDCT Based Secure Data Hiding For Intellectual Property Right ProtectionnalevihtkasNo ratings yet
- Blind Watermarking DCTDocument34 pagesBlind Watermarking DCTnalevihtkasNo ratings yet
- Visual CryptogarphyDocument12 pagesVisual CryptogarphynalevihtkasNo ratings yet
- CRT BasedDocument15 pagesCRT BasedSunil Kumar VemuriNo ratings yet
- Cse Lab Manual MicroprocessorDocument52 pagesCse Lab Manual MicroprocessorDr-Engr ShahMurtaza RashidAl MasudNo ratings yet
- Novel Image EncryptionDocument13 pagesNovel Image EncryptionnalevihtkasNo ratings yet
- Integer DCT ArchitectureDocument4 pagesInteger DCT ArchitecturenalevihtkasNo ratings yet
- LSB Embeedding/watermarkingDocument4 pagesLSB Embeedding/watermarkingnalevihtkasNo ratings yet
- A Method For Combating Random Geometric Attack On Image WatermarkingDocument10 pagesA Method For Combating Random Geometric Attack On Image WatermarkingnalevihtkasNo ratings yet
- binDCT VLSIDocument14 pagesbinDCT VLSInalevihtkasNo ratings yet
- Thesis On WatermarkingDocument62 pagesThesis On WatermarkingnalevihtkasNo ratings yet
- Spatial Domian WatermarkingDocument6 pagesSpatial Domian WatermarkingnalevihtkasNo ratings yet
- Development of VIP For AMBA AXI-4.0 ProtocolDocument5 pagesDevelopment of VIP For AMBA AXI-4.0 ProtocolnalevihtkasNo ratings yet
- Fpga Image ProcessingDocument7 pagesFpga Image ProcessingnalevihtkasNo ratings yet
- UVMDocument10 pagesUVMnalevihtkasNo ratings yet
- Reversible Data Embedding Using A Difference Expansion-TIAN PDFDocument7 pagesReversible Data Embedding Using A Difference Expansion-TIAN PDFAlin BobeicaNo ratings yet
- Document 1477905.1Document7 pagesDocument 1477905.1elcaso34No ratings yet
- Wolfdale1333-D667 R2.0Document42 pagesWolfdale1333-D667 R2.0alvarcNo ratings yet
- SC025SetPastYear20182022 PDFDocument31 pagesSC025SetPastYear20182022 PDFKhairul Hafizh FirdausNo ratings yet
- Here Is The List of FPGA Based VLSI Projects Ideas For Experimenting With VHDL and Verilog HDLDocument4 pagesHere Is The List of FPGA Based VLSI Projects Ideas For Experimenting With VHDL and Verilog HDLShahid Rabbani0% (1)
- 2 1 Java Lab ManualDocument42 pages2 1 Java Lab ManualT BalaNo ratings yet
- Capacity PlanningDocument9 pagesCapacity PlanninghlapsNo ratings yet
- Arduino UNO Based System To Monitor The Cooling Process of Hot FluidDocument8 pagesArduino UNO Based System To Monitor The Cooling Process of Hot FluidIJRASETPublicationsNo ratings yet
- 5001 05 ProcessControlFaceplateWindows PPTDocument18 pages5001 05 ProcessControlFaceplateWindows PPTArwa ElkasabiNo ratings yet
- ICT-CSS 11 - Q1 - W2 - Mod2Document21 pagesICT-CSS 11 - Q1 - W2 - Mod2Albino LarozaNo ratings yet
- IOS Resume FormatDocument4 pagesIOS Resume FormatSavanNo ratings yet
- Visual Studio C# BookDocument319 pagesVisual Studio C# BooklylianmendezNo ratings yet
- Abstract Class in JavaDocument5 pagesAbstract Class in JavasurajNo ratings yet
- NuMicro Flash Memory Controller (FMC): A Leading MCU Platform ProviderDocument31 pagesNuMicro Flash Memory Controller (FMC): A Leading MCU Platform ProviderDharmendra SavaliyaNo ratings yet
- ECUMASTER DL1 Logger and Bluetooth User ManualDocument4 pagesECUMASTER DL1 Logger and Bluetooth User ManualОлег СадовскийNo ratings yet
- RzaiqpdfDocument168 pagesRzaiqpdfingemajaryNo ratings yet
- AV Connectivity & Signal DistributionDocument37 pagesAV Connectivity & Signal Distributionperpelea ramonaNo ratings yet
- College Management SystemDocument37 pagesCollege Management Systemkuldeep_chand1040% (5)
- High Availability Administration Guide ENDocument134 pagesHigh Availability Administration Guide ENojoladapoNo ratings yet
- Cable EquipmentDocument8 pagesCable EquipmentJean-Jacques OuandaogoNo ratings yet
- Logcat 1592929311484Document11 pagesLogcat 1592929311484Leonardo HoyoNo ratings yet
- Brosur Anandam Jogja Gadget Expo 2017 2 1 PDFDocument2 pagesBrosur Anandam Jogja Gadget Expo 2017 2 1 PDFFajar SatriyaNo ratings yet
- 5.8 Twin-BIOS™ (Optional) : The Diagram Below Describes The Procedure in BriefDocument3 pages5.8 Twin-BIOS™ (Optional) : The Diagram Below Describes The Procedure in BriefnalgatoreNo ratings yet
- 22 Intro To ZioDocument14 pages22 Intro To ZioGamba MercenariaNo ratings yet
- Midterm Exam Questions on Computer NetworksDocument2 pagesMidterm Exam Questions on Computer NetworksMony JosephNo ratings yet
- Linux DDDocument2 pagesLinux DDVeni GuptaNo ratings yet
- Lab 6 - Csma CD - 20mis1115Document5 pagesLab 6 - Csma CD - 20mis1115SamNo ratings yet
- Introduction to Computers, Programs, and PythonDocument141 pagesIntroduction to Computers, Programs, and PythonceydaNo ratings yet
- UDS Request Frame FormatDocument3 pagesUDS Request Frame FormatosmanNo ratings yet
- UML DifferencesDocument11 pagesUML Differencessantanu mahalaNo ratings yet
- Datasheet AMD Alchemy Au1100Document414 pagesDatasheet AMD Alchemy Au1100Cosmin CodrescuNo ratings yet
- SUMMARY: So Good They Can't Ignore You (UNOFFICIAL SUMMARY: Lesson from Cal Newport)From EverandSUMMARY: So Good They Can't Ignore You (UNOFFICIAL SUMMARY: Lesson from Cal Newport)Rating: 4.5 out of 5 stars4.5/5 (14)
- Summary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsFrom EverandSummary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsNo ratings yet
- Summary of Atomic Habits by James ClearFrom EverandSummary of Atomic Habits by James ClearRating: 5 out of 5 stars5/5 (169)
- Summary of Can’t Hurt Me by David Goggins: Can’t Hurt Me Book Analysis by Peter CuomoFrom EverandSummary of Can’t Hurt Me by David Goggins: Can’t Hurt Me Book Analysis by Peter CuomoRating: 5 out of 5 stars5/5 (1)
- Summary and Analysis of The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan HouselFrom EverandSummary and Analysis of The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan HouselRating: 5 out of 5 stars5/5 (11)
- Summary of The Hunger Habit by Judson Brewer: Why We Eat When We're Not Hungry and How to StopFrom EverandSummary of The Hunger Habit by Judson Brewer: Why We Eat When We're Not Hungry and How to StopNo ratings yet
- Summary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionFrom EverandSummary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionNo ratings yet
- Summary of Rich AF by Vivian Tu: The Winning Money Mindset That Will Change Your LifeFrom EverandSummary of Rich AF by Vivian Tu: The Winning Money Mindset That Will Change Your LifeNo ratings yet
- Summary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursFrom EverandSummary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursNo ratings yet
- Summary Guide: Building a StoryBrand: Clarify Your Message So Customers Will Listen: By Donald Miller | The Mindset Warrior Summary Guide: ( Persuasion Marketing, Copywriting, Storytelling, Branding Identity )From EverandSummary Guide: Building a StoryBrand: Clarify Your Message So Customers Will Listen: By Donald Miller | The Mindset Warrior Summary Guide: ( Persuasion Marketing, Copywriting, Storytelling, Branding Identity )No ratings yet
- Summary of Atomic Habits: An Easy & Proven Way to Build Good Habits & Break Bad Ones by James ClearFrom EverandSummary of Atomic Habits: An Easy & Proven Way to Build Good Habits & Break Bad Ones by James ClearRating: 4.5 out of 5 stars4.5/5 (13)
- Summary of How to Know a Person By David Brooks: The Art of Seeing Others Deeply and Being Deeply SeenFrom EverandSummary of How to Know a Person By David Brooks: The Art of Seeing Others Deeply and Being Deeply SeenRating: 2.5 out of 5 stars2.5/5 (3)
- GMAT Prep 2024/2025 For Dummies with Online Practice (GMAT Focus Edition)From EverandGMAT Prep 2024/2025 For Dummies with Online Practice (GMAT Focus Edition)No ratings yet
- Summary of Poor Charlie’s Almanack by Charles T. Munger and Peter D. Kaufman: The Essential Wit and Wisdom of Charles T. Munger: The Essential Wit and Wisdom of Charles T. MungerFrom EverandSummary of Poor Charlie’s Almanack by Charles T. Munger and Peter D. Kaufman: The Essential Wit and Wisdom of Charles T. Munger: The Essential Wit and Wisdom of Charles T. MungerNo ratings yet
- PMP Exam Prep: Master the Latest Techniques and Trends with this In-depth Project Management Professional Guide: Study Guide | Real-life PMP Questions and Detailed Explanation | 200+ Questions and AnswersFrom EverandPMP Exam Prep: Master the Latest Techniques and Trends with this In-depth Project Management Professional Guide: Study Guide | Real-life PMP Questions and Detailed Explanation | 200+ Questions and AnswersRating: 5 out of 5 stars5/5 (2)
- Summary of The Coming Wave By Mustafa Suleyman: Technology, Power, and the Twenty-first Century's Greatest DilemmaFrom EverandSummary of The Coming Wave By Mustafa Suleyman: Technology, Power, and the Twenty-first Century's Greatest DilemmaRating: 3.5 out of 5 stars3.5/5 (3)
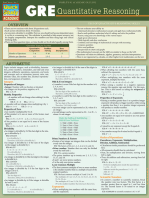
- GRE - Quantitative Reasoning: QuickStudy Laminated Reference GuideFrom EverandGRE - Quantitative Reasoning: QuickStudy Laminated Reference GuideNo ratings yet
- Summary of Win Every Argument By Mehdi Hasan:The Art of Debating, Persuading, and Public SpeakingFrom EverandSummary of Win Every Argument By Mehdi Hasan:The Art of Debating, Persuading, and Public SpeakingNo ratings yet
- Summary of Hidden Potential By Adam Grant: The Science of Achieving Greater ThingsFrom EverandSummary of Hidden Potential By Adam Grant: The Science of Achieving Greater ThingsNo ratings yet
- Summary of Forever Strong By Dr. Gabrielle Lyon : A New, Science-Based Strategy for Aging WellFrom EverandSummary of Forever Strong By Dr. Gabrielle Lyon : A New, Science-Based Strategy for Aging WellNo ratings yet
- Summary of Eat to Beat Disease by Dr. William LiFrom EverandSummary of Eat to Beat Disease by Dr. William LiRating: 5 out of 5 stars5/5 (52)
- Summary of The Dawn of Everything by David Graeber and David Wengrow: The Dawn of Everything Book Complete Analysis & Study GuideFrom EverandSummary of The Dawn of Everything by David Graeber and David Wengrow: The Dawn of Everything Book Complete Analysis & Study GuideRating: 5 out of 5 stars5/5 (1)
- Workbook & Summary of Becoming Supernatural How Common People Are Doing the Uncommon by Joe Dispenza: WorkbooksFrom EverandWorkbook & Summary of Becoming Supernatural How Common People Are Doing the Uncommon by Joe Dispenza: WorkbooksNo ratings yet
- Digital SAT Reading and Writing Practice Questions: Test Prep SeriesFrom EverandDigital SAT Reading and Writing Practice Questions: Test Prep SeriesRating: 5 out of 5 stars5/5 (2)
- Summary of Some People Need Killing by Patricia Evangelista:A Memoir of Murder in My CountryFrom EverandSummary of Some People Need Killing by Patricia Evangelista:A Memoir of Murder in My CountryNo ratings yet
- The Talented Mr Ripley by Patricia Highsmith (Book Analysis): Detailed Summary, Analysis and Reading GuideFrom EverandThe Talented Mr Ripley by Patricia Highsmith (Book Analysis): Detailed Summary, Analysis and Reading GuideNo ratings yet