You might also like
- Laplace Transforms and S-Domain Circuit AnalysisDocument9 pagesLaplace Transforms and S-Domain Circuit AnalysisAlyoNovakNo ratings yet
- Door Open Messages: (S2000, Game King and AVP)Document2 pagesDoor Open Messages: (S2000, Game King and AVP)AlyoNovakNo ratings yet
- Windows 7 HP KeyDocument1 pageWindows 7 HP Keyjose luisNo ratings yet
- Usa Mav500mkvi PDFDocument364 pagesUsa Mav500mkvi PDFAlyoNovakNo ratings yet
- SecordDocument6 pagesSecordAlyoNovakNo ratings yet
- Automation of Pneumatic Sheet Metal Bending MachinehhhhhhhDocument3 pagesAutomation of Pneumatic Sheet Metal Bending MachinehhhhhhhAjay BhaleraoNo ratings yet
- (Program Name: Nuevoprograma1) (Section Name: Sección1)Document1 page(Program Name: Nuevoprograma1) (Section Name: Sección1)AlyoNovakNo ratings yet
- (408177384) FinalExam SolutionDocument8 pages(408177384) FinalExam SolutionNikolay Ysayaka HatakeNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentAlyoNovakNo ratings yet
- AdobeDocument1 pageAdobeAlyoNovakNo ratings yet
- (Program Name: Nuevoprograma1) (Section Name: Sección1)Document1 page(Program Name: Nuevoprograma1) (Section Name: Sección1)AlyoNovakNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentAlyoNovakNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentAlyoNovakNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentAlyoNovakNo ratings yet
- PaginaDocument1 pagePaginaAlyoNovakNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentAlyoNovakNo ratings yet
- Semaforo VideoDocument1 pageSemaforo VideoAlyoNovakNo ratings yet
- I/O Wiring Diagram: Sysmac Cpm1A Cpu UnitsDocument2 pagesI/O Wiring Diagram: Sysmac Cpm1A Cpu UnitsAlyoNovakNo ratings yet
- FLI DownloadDocument9 pagesFLI DownloadAlyoNovakNo ratings yet
- PLC TraningDocument1 pagePLC TraningAlyoNovakNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 12 SemaforosDocument1 page12 SemaforosAlyoNovakNo ratings yet
- AvpDocument1 pageAvpAlyoNovakNo ratings yet
- FLI DownloadDocument11 pagesFLI DownloadAlyoNovakNo ratings yet
- SecordDocument6 pagesSecordAlyoNovakNo ratings yet
- (408177384) FinalExam SolutionDocument8 pages(408177384) FinalExam SolutionNikolay Ysayaka HatakeNo ratings yet
- AVP How To GuideDocument45 pagesAVP How To Guidemiltoncg0% (1)
- AdobeDocument1 pageAdobeAlyoNovakNo ratings yet
- ListaDocument2 pagesListaAlyoNovakNo ratings yet
- New Text DocumentDocument2 pagesNew Text DocumentAlyoNovakNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Termostato CrestronDocument100 pagesTermostato CrestronOctavio Rodriguez GNo ratings yet
- 08-GSM Radio Network Optimization Guide ManualDocument124 pages08-GSM Radio Network Optimization Guide ManualCatherine RyanNo ratings yet
- TM ACP Install ENG PDFDocument124 pagesTM ACP Install ENG PDFHung Cuong PhamNo ratings yet
- FEMM Inside PDFDocument52 pagesFEMM Inside PDFhewitt isaacNo ratings yet
- ARPANET to Satellite Broadband - A History of Internet ConnectivityDocument3 pagesARPANET to Satellite Broadband - A History of Internet ConnectivityirnairNo ratings yet
- LC171W03 C4 PDFDocument29 pagesLC171W03 C4 PDFAnderson Duarte100% (1)
- Asus VT207NDocument84 pagesAsus VT207Nbawbawerert34No ratings yet
- Port Splitters: Installation InstructionsDocument24 pagesPort Splitters: Installation InstructionsJosep Alexander Gutierrez ReyesNo ratings yet
- Causes and Effects of Single-Phasing Induction MotorsDocument8 pagesCauses and Effects of Single-Phasing Induction MotorsvenugopalNo ratings yet
- Calibracion E69PDocument16 pagesCalibracion E69PmktcableNo ratings yet
- Equipment List Report: Component Group: NoneDocument2 pagesEquipment List Report: Component Group: NoneNuman AminNo ratings yet
- L3 Communications CVR (FA2100) 23-70-04 - Rev 07Document268 pagesL3 Communications CVR (FA2100) 23-70-04 - Rev 07Indiomarcio Ghelardi100% (1)
- Esybox Max in SienaDocument2 pagesEsybox Max in SienaBenRyoNo ratings yet
- Reglette Opple Led Wp-U3 1200-40wDocument4 pagesReglette Opple Led Wp-U3 1200-40wbenzerara younesNo ratings yet
- Be Winter 2022Document1 pageBe Winter 2022Fariha shaikhNo ratings yet
- Icm7555 56Document13 pagesIcm7555 56she rifNo ratings yet
- 1SCA022798R0730 Ot600u03 Switch DisconnectorDocument3 pages1SCA022798R0730 Ot600u03 Switch Disconnectorsdk00No ratings yet
- Atoll 3.1.2 Umts HspaDocument24 pagesAtoll 3.1.2 Umts HspaFollowDa FlowNo ratings yet
- Exp6.Single Phase Bridge Inverter Using PWMDocument6 pagesExp6.Single Phase Bridge Inverter Using PWMAbdullah MohammedNo ratings yet
- Ax Series User ManualDocument15 pagesAx Series User ManualAl Fakhamah Lifts100% (1)
- BEKU 2431 Electrical Engineering Laboratory I: Experiment 4: Three-Phase CircuitsDocument4 pagesBEKU 2431 Electrical Engineering Laboratory I: Experiment 4: Three-Phase CircuitsSyazwan JasniNo ratings yet
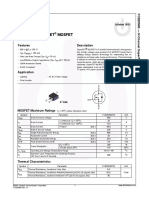
- Fcb20N60: N-Channel Superfet MosfetDocument9 pagesFcb20N60: N-Channel Superfet MosfetEo GpNo ratings yet
- Homework 2: Calculating PV Area, Computer Costs, Load Power, and PV Energy CostDocument6 pagesHomework 2: Calculating PV Area, Computer Costs, Load Power, and PV Energy CostShahid ZaffarNo ratings yet
- Dell 5210n/5310n Service ManualDocument430 pagesDell 5210n/5310n Service ManualBob ThortonNo ratings yet
- User Manual: HAT520N Ats ControllerDocument15 pagesUser Manual: HAT520N Ats ControllerVinhNo ratings yet
- A11 Electric Diagram-3Document7 pagesA11 Electric Diagram-3Ibrahim TamerNo ratings yet
- Publisher in ResearchDocument8 pagesPublisher in Researchrikaseo rikaNo ratings yet
- MI 0600 STK1R EN 64 0 A RevDocument100 pagesMI 0600 STK1R EN 64 0 A RevMinatas MiraNo ratings yet
- Seongil IM - Yonsei UniversityDocument36 pagesSeongil IM - Yonsei UniversityMartinNo ratings yet
- TDS - Tassel Neo FloodDocument1 pageTDS - Tassel Neo Floodmurugan.ragulNo ratings yet