You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- 3 TransformationsDocument38 pages3 Transformationsbt21109002 AlishaNo ratings yet
- 2D Geometrical Transformations: Foley & Van Dam, Chapter 5Document34 pages2D Geometrical Transformations: Foley & Van Dam, Chapter 5Ashutosh JhaNo ratings yet
- Lecture 11 Background SubtractionDocument17 pagesLecture 11 Background SubtractionmayajogiNo ratings yet
- 2D 3D TransformationsDocument24 pages2D 3D TransformationsEman KarisNo ratings yet
- CS 543: Computer Graphics Lecture 4 (Part I) : 3D Affine TransformsDocument26 pagesCS 543: Computer Graphics Lecture 4 (Part I) : 3D Affine TransformsThanasis AnthopoulosNo ratings yet
- IGCSE Mathematics Formula SheetDocument7 pagesIGCSE Mathematics Formula Sheetburner bNo ratings yet
- 01 TransformationsDocument16 pages01 TransformationsAnonymous 9q5GEfm8INo ratings yet
- CSE455 6 (2d-Transform)Document32 pagesCSE455 6 (2d-Transform)Ankit AwalNo ratings yet
- Computer Vision - 3D TransformationsDocument21 pagesComputer Vision - 3D TransformationsLong Nguyễn HoàngNo ratings yet
- Materi 03. 2D Geometric Transformation: Komputer GrafikDocument33 pagesMateri 03. 2D Geometric Transformation: Komputer GrafikFauzi RahadianNo ratings yet
- 2D TransformationDocument38 pages2D TransformationSarvodhya Bahri0% (1)
- Unit 3 - Computer Graphics & Multimedia - WWW - Rgpvnotes.inDocument30 pagesUnit 3 - Computer Graphics & Multimedia - WWW - Rgpvnotes.insai projectNo ratings yet
- FMSQ Revision NotesDocument5 pagesFMSQ Revision NotesJay AmbadkarNo ratings yet
- CVF07 Lec03Document27 pagesCVF07 Lec03api-3709263No ratings yet
- Geometric Transformations in The 2D API: 2 2 Cos, Sin 5 5Document17 pagesGeometric Transformations in The 2D API: 2 2 Cos, Sin 5 5yekychNo ratings yet
- Three-Dimensional TransformationsDocument43 pagesThree-Dimensional TransformationsWafa ElgalhoudNo ratings yet
- Geom2d PDFDocument13 pagesGeom2d PDFstalin1227No ratings yet
- CAD/CAM: Geometric Description (Rotation About An Arbitrary Axis)Document3 pagesCAD/CAM: Geometric Description (Rotation About An Arbitrary Axis)ahmed_ibrahiemNo ratings yet
- MathsDocument33 pagesMathsHoudaNo ratings yet
- 2D Geometric Transformations: (Chapter 5 in FVD)Document31 pages2D Geometric Transformations: (Chapter 5 in FVD)Rukmani DeviNo ratings yet
- Three Dimensional Modeling TransformationsDocument35 pagesThree Dimensional Modeling Transformationsمصطفى غالب جونيNo ratings yet
- Lecture9 Three DimensionalDocument28 pagesLecture9 Three DimensionalAysha Akter UrmiNo ratings yet
- 3D TransformationDocument22 pages3D TransformationDeepa SNo ratings yet
- 10.0 2D TransformsDocument38 pages10.0 2D Transformswei liNo ratings yet
- Computer Graphics Lecture - 2 - V2024Document35 pagesComputer Graphics Lecture - 2 - V2024amandemarvinNo ratings yet
- Examples of Change of Basis and Matrix Transformations. Quadratic FormsDocument12 pagesExamples of Change of Basis and Matrix Transformations. Quadratic FormsAnonymous 9q5GEfm8INo ratings yet
- Math Workshop by SlidesgoDocument35 pagesMath Workshop by SlidesgoAyesha Nayyer100% (1)
- Geometric Transformations With VC++Document47 pagesGeometric Transformations With VC++Kewal Singh PaneserNo ratings yet
- Three Dimensional TransformationsDocument14 pagesThree Dimensional TransformationsStudy portalNo ratings yet
- ZTZMGob JDocument7 pagesZTZMGob JObert MupomokiNo ratings yet
- AMI 40 From175to186 PDFDocument12 pagesAMI 40 From175to186 PDFJagadeeshMadugulaNo ratings yet
- Transformations PDFDocument38 pagesTransformations PDFkajalNo ratings yet
- Final 2D Transformations Heran Baker NewDocument64 pagesFinal 2D Transformations Heran Baker NewImmensely IndianNo ratings yet
- Homogeneous TransformDocument12 pagesHomogeneous TransformAnonymous G9t3IVfL4JNo ratings yet
- Linear Transformation and Rank Nullity Theorem 2 LecturesDocument32 pagesLinear Transformation and Rank Nullity Theorem 2 Lecturespratyay gangulyNo ratings yet
- 03 2D-3D GeometryDocument77 pages03 2D-3D GeometryTuseeq RazaNo ratings yet
- FALLSEM2019-20 BCI3006 ETH VL2019201001323 Reference Material I 10-Aug-2019 Geometric Transformations PDFDocument38 pagesFALLSEM2019-20 BCI3006 ETH VL2019201001323 Reference Material I 10-Aug-2019 Geometric Transformations PDFAchintyaSRaoNo ratings yet
- Transformations PDFDocument38 pagesTransformations PDFidheivyaNo ratings yet
- 2D Geometrical Transformations: Foley & Van Dam, Chapter 5Document34 pages2D Geometrical Transformations: Foley & Van Dam, Chapter 5Vincent VetterNo ratings yet
- Assignment 3 1Document5 pagesAssignment 3 1prachikumar04No ratings yet
- MTH 102: ODE: Assignment-1Document6 pagesMTH 102: ODE: Assignment-1Jeraldine CalutenNo ratings yet
- Sec 5Document20 pagesSec 5Eng ForQ3No ratings yet
- Trigonometric Graphs: y Sin XDocument7 pagesTrigonometric Graphs: y Sin XMohamed TarekNo ratings yet
- Transformation 1Document34 pagesTransformation 1Uchihaa SasukeNo ratings yet
- Exercise1 Numerical SolutionsDocument2 pagesExercise1 Numerical Solutions李金良No ratings yet
- Ipvive ChallengeDocument8 pagesIpvive ChallengeTrung NguyenNo ratings yet
- 146 Chapter 13. The Trigonometric Functions (LECTURE NOTES 9)Document15 pages146 Chapter 13. The Trigonometric Functions (LECTURE NOTES 9)Brendon MuriraNo ratings yet
- Summary of Tensors and FieldsDocument6 pagesSummary of Tensors and FieldsDaljit SinghNo ratings yet
- 1060text CocDocument13 pages1060text CocJhon Edison Bravo BuitragoNo ratings yet
- HeatsolnDocument2 pagesHeatsolnmayankNo ratings yet
- Homogeneous TransformDocument12 pagesHomogeneous TransformharshNo ratings yet
- Math Cumulative 2 ReviewDocument5 pagesMath Cumulative 2 ReviewJNo ratings yet
- Trigonometric Functions Grade 10Document47 pagesTrigonometric Functions Grade 10Adhanom G.No ratings yet
- Unit 2 - Part 1Document74 pagesUnit 2 - Part 1A1FA MSKNo ratings yet
- Formula SheetDocument2 pagesFormula SheetSEOW INN LEENo ratings yet
- Winter 2017, MATH 215 Calculus III, Final Exam 4/24/2017, 10:30 Am - 12:30 PM (120 Minutes)Document20 pagesWinter 2017, MATH 215 Calculus III, Final Exam 4/24/2017, 10:30 Am - 12:30 PM (120 Minutes)Doris riverosNo ratings yet
- 3D TransformationDocument24 pages3D TransformationMd. Sajjatul IslamNo ratings yet
- Seminar3Document8 pagesSeminar3Tamata BeberNo ratings yet
- Linear Algebra and SVD: (Some Slides Adapted From Octavia Camps)Document24 pagesLinear Algebra and SVD: (Some Slides Adapted From Octavia Camps)Sakshi Popli ChopraNo ratings yet
- Capgemini QuantDocument11 pagesCapgemini QuantVishal GuptaNo ratings yet
- Realtimeinterviewquestions Com 2017 04 Linux Multiple Choice QuestionsDocument12 pagesRealtimeinterviewquestions Com 2017 04 Linux Multiple Choice QuestionsVishal GuptaNo ratings yet
- Capgemini SyllabusDocument8 pagesCapgemini SyllabusVishal GuptaNo ratings yet
- Final Monograph Secure Network ProtocolDocument91 pagesFinal Monograph Secure Network ProtocolVishal GuptaNo ratings yet
- List Library C++Document2 pagesList Library C++Vishal GuptaNo ratings yet
- English Vocabulary PDFDocument254 pagesEnglish Vocabulary PDFVishal GuptaNo ratings yet
- Python Interview QuestionsDocument20 pagesPython Interview QuestionsVishal Gupta100% (2)
- Unit 2: University Institute of Engineering (UIE)Document42 pagesUnit 2: University Institute of Engineering (UIE)Vishal GuptaNo ratings yet
- Prepinsta Com Tcs Coding QuestionsDocument20 pagesPrepinsta Com Tcs Coding QuestionsVishal GuptaNo ratings yet
- 100+ Java Interview Questions You Must Prepare in 2019: Mymock Interview Service For Real Tech JobsDocument20 pages100+ Java Interview Questions You Must Prepare in 2019: Mymock Interview Service For Real Tech JobsVishal GuptaNo ratings yet
- E-Banking and Commerce CSO-392 Topic: ATM: University Institute of Engineering (UIE)Document21 pagesE-Banking and Commerce CSO-392 Topic: ATM: University Institute of Engineering (UIE)Vishal GuptaNo ratings yet
- Cyber Law and Security: UNIT-3Document48 pagesCyber Law and Security: UNIT-3Vishal GuptaNo ratings yet
- Cyber Law and Security: UNIT-2Document48 pagesCyber Law and Security: UNIT-2Vishal GuptaNo ratings yet
- Unit - 1 PPT OF CYBERDocument50 pagesUnit - 1 PPT OF CYBERVishal GuptaNo ratings yet
- Unit 3: University Institute of Engineering (UIE)Document29 pagesUnit 3: University Institute of Engineering (UIE)Vishal GuptaNo ratings yet
- Design and Implementation of A Secure Campus Network: Author:-Swapnil KushwahaDocument5 pagesDesign and Implementation of A Secure Campus Network: Author:-Swapnil KushwahaVishal GuptaNo ratings yet
- Cyber Law and Security: University Institute of Engineering (UIE)Document40 pagesCyber Law and Security: University Institute of Engineering (UIE)Vishal GuptaNo ratings yet
- Soft SkillDocument7 pagesSoft SkillVishal GuptaNo ratings yet
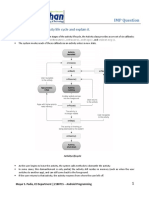
- Draw A Diagram For Activity Life Cycle and Explain It.: IMP QuestionDocument33 pagesDraw A Diagram For Activity Life Cycle and Explain It.: IMP QuestionVishal GuptaNo ratings yet
- Software Requirements Specification: Packet Sniffing Using WiresharkDocument8 pagesSoftware Requirements Specification: Packet Sniffing Using WiresharkVishal GuptaNo ratings yet
- 101 Math Short Cuts (WWW - Qmaths.in)Document12 pages101 Math Short Cuts (WWW - Qmaths.in)Vishal GuptaNo ratings yet
- Lecture 1423726199Document15 pagesLecture 1423726199Vishal GuptaNo ratings yet
- CG GTU Study Material 2017 11042017 033102AM PDFDocument130 pagesCG GTU Study Material 2017 11042017 033102AM PDFVishal GuptaNo ratings yet
- CG GTU Study Material 2017 11042017 033102AM PDFDocument130 pagesCG GTU Study Material 2017 11042017 033102AM PDFVishal GuptaNo ratings yet
- Map ReduceDocument8 pagesMap ReduceVishal GuptaNo ratings yet
- Various Big Data ToolsDocument33 pagesVarious Big Data ToolsVishal GuptaNo ratings yet
- IM1 Calculus 2 Revised 2024 PUPSMBDocument14 pagesIM1 Calculus 2 Revised 2024 PUPSMBEunice AlonzoNo ratings yet
- Dutch Iris Eng 9734 HappyPattyCrochetDocument68 pagesDutch Iris Eng 9734 HappyPattyCrochetFrancisca Rico100% (6)
- 4th Sept - Marathon Series Lecture 8 - General AwarenessDocument208 pages4th Sept - Marathon Series Lecture 8 - General AwarenessManbir ArinNo ratings yet
- 40 Sink and FloatDocument38 pages40 Sink and Floatleandro hualverdeNo ratings yet
- Breastfeeding W Success ManualDocument40 pagesBreastfeeding W Success ManualNova GaveNo ratings yet
- Lightning Arrester Lightningcontroller MC 125-B/Npe: Operation and Fields of ApplicationDocument2 pagesLightning Arrester Lightningcontroller MC 125-B/Npe: Operation and Fields of ApplicationAnas BasarahNo ratings yet
- A.meaning and Scope of Education FinalDocument22 pagesA.meaning and Scope of Education FinalMelody CamcamNo ratings yet
- The Linguistic Colonialism of EnglishDocument4 pagesThe Linguistic Colonialism of EnglishAdriana MirandaNo ratings yet
- Modular Q1 WK3-4Document3 pagesModular Q1 WK3-4JENIFFER DE LEONNo ratings yet
- Wealth and Poverty in The Book of Proverbs PDFDocument133 pagesWealth and Poverty in The Book of Proverbs PDFMaahes Cultural Library100% (1)
- Highlights ASME Guides Preheat PWHT IDocument4 pagesHighlights ASME Guides Preheat PWHT IArul Edwin Vijay VincentNo ratings yet
- Educationusa 2022globalguide Final Reduced SizeDocument84 pagesEducationusa 2022globalguide Final Reduced SizeAnna ModebadzeNo ratings yet
- Geotechnical PaperDocument16 pagesGeotechnical PaperTxavo HesiarenNo ratings yet
- De Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Co File Nghe Nam 2020Document11 pagesDe Thi Hoc Ki 1 Lop 11 Mon Tieng Anh Co File Nghe Nam 2020HiềnNo ratings yet
- Hele Grade4Document56 pagesHele Grade4Chard Gonzales100% (3)
- PDFDocument3 pagesPDFAhmedraza123 NagdaNo ratings yet
- Smartfind E5 g5 User ManualDocument49 pagesSmartfind E5 g5 User ManualdrewlioNo ratings yet
- Pathogenic Escherichia Coli Associated With DiarrheaDocument7 pagesPathogenic Escherichia Coli Associated With DiarrheaSiti Fatimah RadNo ratings yet
- Python in Hidrology BookDocument153 pagesPython in Hidrology BookJuan david Gonzalez vasquez100% (1)
- Arithmetic QuestionsDocument2 pagesArithmetic QuestionsAmir KhanNo ratings yet
- SIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04Document1 pageSIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04marcospmmNo ratings yet
- Hockney-Falco Thesis: 1 Setup of The 2001 PublicationDocument6 pagesHockney-Falco Thesis: 1 Setup of The 2001 PublicationKurayami ReijiNo ratings yet
- Loctite 586 PDFDocument9 pagesLoctite 586 PDForihimieNo ratings yet
- Test Bank For Psychology 6th Edition Don HockenburyDocument18 pagesTest Bank For Psychology 6th Edition Don HockenburyKaitlynMorganarwp100% (42)
- Leadership and Management in Different Arts FieldsDocument10 pagesLeadership and Management in Different Arts Fieldsjay jayNo ratings yet
- 02 Object Modeling TechniqueDocument50 pages02 Object Modeling TechniqueMuhammad Romadhon Batukarang EsdNo ratings yet
- Fuzzy Gain Scheduled Pi Controller For ADocument5 pagesFuzzy Gain Scheduled Pi Controller For AOumayNo ratings yet
- Ultra ConductorsDocument28 pagesUltra ConductorsAnu Kp50% (8)
- DCS800ServiceManual RevADocument96 pagesDCS800ServiceManual RevAElinplastNo ratings yet
- Healthy Apps Us New VarDocument9 pagesHealthy Apps Us New VarJESUS DELGADONo ratings yet