You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Capacity Factor of Wind Turbine System Based On Different Power Curves and Weibull Distribution ParametersDocument4 pagesCapacity Factor of Wind Turbine System Based On Different Power Curves and Weibull Distribution ParametersStefania OliveiraNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Dilip Datta (Auth.) - LaTeX in 24 Hours - A Practical Guide For Scientific Writing-Springer International Publishing (2017)Document309 pagesDilip Datta (Auth.) - LaTeX in 24 Hours - A Practical Guide For Scientific Writing-Springer International Publishing (2017)Leandro de Queiroz100% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 19 AppendixDocument19 pages19 AppendixJithendra NathNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Energies 11 00425 PDFDocument15 pagesEnergies 11 00425 PDFStefania OliveiraNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFDocument7 pagesA Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFStefania OliveiraNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- PDFDocument9 pagesPDFStefania OliveiraNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Slootweg2 Pessm 01 PDFDocument6 pagesSlootweg2 Pessm 01 PDFStefania OliveiraNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Dynamic Characteristic Analysis of Doubly-Fed InduDocument9 pagesDynamic Characteristic Analysis of Doubly-Fed InduStefania OliveiraNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- PW M Digital e Scalar General Iza DoDocument9 pagesPW M Digital e Scalar General Iza DoJosé Moraes Gurgel NetoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Novel Optimal Design Ofdfig Crowbar Resistor During Grid FaultsDocument5 pagesA Novel Optimal Design Ofdfig Crowbar Resistor During Grid FaultsStefania OliveiraNo ratings yet
- Energies 11 01025 v2 PDFDocument24 pagesEnergies 11 01025 v2 PDFStefania OliveiraNo ratings yet
- 14bus PDFDocument13 pages14bus PDFStefania OliveiraNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Applied Sciences: Fault Studies and Distance Protection of Transmission Lines Connected To DFIG-Based Wind FarmsDocument19 pagesApplied Sciences: Fault Studies and Distance Protection of Transmission Lines Connected To DFIG-Based Wind FarmsStefania OliveiraNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Trujillo KelynRoselyBotina M PDFDocument132 pagesTrujillo KelynRoselyBotina M PDFStefania OliveiraNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Voltage Sag Effects On The Process Continuity of A Refinery With Induction Motors Loads PDFDocument8 pagesVoltage Sag Effects On The Process Continuity of A Refinery With Induction Motors Loads PDFStefania OliveiraNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 200 PDFDocument6 pages200 PDFStefania OliveiraNo ratings yet
- 14bus PDFDocument13 pages14bus PDFStefania OliveiraNo ratings yet
- Energies 11 00425 PDFDocument15 pagesEnergies 11 00425 PDFStefania OliveiraNo ratings yet
- Design of LCL Filters For The Back-To-Back Converter in A Doubly Fed Induction Generator PDFDocument7 pagesDesign of LCL Filters For The Back-To-Back Converter in A Doubly Fed Induction Generator PDFStefania OliveiraNo ratings yet
- Project Report - Wind-Power Converter Grid-Side Harmonics Investigation - Sultan Jumayev - The SwitchDocument17 pagesProject Report - Wind-Power Converter Grid-Side Harmonics Investigation - Sultan Jumayev - The SwitchSubhash Chandra PalNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Test and Analysis of LVRT Characteristic of Wind FarmDocument6 pagesTest and Analysis of LVRT Characteristic of Wind FarmStefania OliveiraNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Dfig PDFDocument3 pagesDfig PDFStefania OliveiraNo ratings yet
- Basics DFIG PDFDocument5 pagesBasics DFIG PDFStefania OliveiraNo ratings yet
- Optimal Location of STATCOM Using Chemical Reactio PDFDocument16 pagesOptimal Location of STATCOM Using Chemical Reactio PDFStefania OliveiraNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Ieee 14 Bus Technical NoteDocument6 pagesIeee 14 Bus Technical NoteStefania OliveiraNo ratings yet
- Modeling and Validation of A Synchronous-Machine - Controlled-Rectifier System PDFDocument80 pagesModeling and Validation of A Synchronous-Machine - Controlled-Rectifier System PDFStefania OliveiraNo ratings yet
- Synchronous Inertia Control For Wind TurbinesDocument8 pagesSynchronous Inertia Control For Wind TurbinesStefania OliveiraNo ratings yet
- Modeling and Validation of A Synchronous-Machine - Controlled-Rectifier System PDFDocument80 pagesModeling and Validation of A Synchronous-Machine - Controlled-Rectifier System PDFStefania OliveiraNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Model Scim PDFDocument42 pagesModel Scim PDFStefania OliveiraNo ratings yet
- Digital simulation of DC links and AC machinesDocument8 pagesDigital simulation of DC links and AC machinesNarges FallahNo ratings yet
- 2.electricity Wiring Regulations-807Document139 pages2.electricity Wiring Regulations-807Saleesh PindiyedathNo ratings yet
- Detuned Filter ReactorsDocument4 pagesDetuned Filter ReactorsthaisubNo ratings yet
- Ad-Servo 30135Document51 pagesAd-Servo 30135Agustin MantegazzaNo ratings yet
- Portable X-ray NDT Equipment 40kV-350kVDocument6 pagesPortable X-ray NDT Equipment 40kV-350kVdhasdjNo ratings yet
- Fortress ManualDocument77 pagesFortress ManualsitiodistintoNo ratings yet
- 1.5-77 (Class I) : Highest Capacity Factor in Its ClassDocument8 pages1.5-77 (Class I) : Highest Capacity Factor in Its ClassCamio HormazabalNo ratings yet
- Week5 ProblemsDocument1 pageWeek5 ProblemsairaNo ratings yet
- CT Dimensioning Master FileDocument10 pagesCT Dimensioning Master FileCm Tham (Facebook)No ratings yet
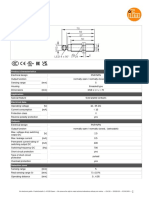
- 4.1 General Device Data: 4.1.1 Analog InputsDocument4 pages4.1 General Device Data: 4.1.1 Analog InputsEbrahim ArzaniNo ratings yet
- ABB - ACS880-37 - Hardware Manual 160-3200kWDocument278 pagesABB - ACS880-37 - Hardware Manual 160-3200kWLuisNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Power Supplies: InncomDocument2 pagesPower Supplies: InncomALLISON VANESSA DIAZ GUERRERONo ratings yet
- Tma External Alarms InterfacesDocument8 pagesTma External Alarms InterfacesloveismagicNo ratings yet
- Few Words About ThreePhase AlternatorDocument5 pagesFew Words About ThreePhase AlternatorRobert GalarzaNo ratings yet
- Flywheel Energy FormulaDocument9 pagesFlywheel Energy Formulaalexbusinesss100% (1)
- RCS-9622CN - 071028 Transformer Management Relay Instruction Manual (EN - DYBH0413 (1) .0091.1201)Document150 pagesRCS-9622CN - 071028 Transformer Management Relay Instruction Manual (EN - DYBH0413 (1) .0091.1201)jayapalNo ratings yet
- AC Machine (Generator-Alternator) - WPS OfficeDocument88 pagesAC Machine (Generator-Alternator) - WPS OfficeJohnray HabolNo ratings yet
- ISSN: 2528-3820 Website: Https://jurnal - Unma.ac - Id/index - PHP/STDocument7 pagesISSN: 2528-3820 Website: Https://jurnal - Unma.ac - Id/index - PHP/STUdek AjaNo ratings yet
- Electric Power Systems Synchronous MachinesDocument6 pagesElectric Power Systems Synchronous MachinesStuardo López MéndezNo ratings yet
- 45TESYST Selection GuideDocument1 page45TESYST Selection Guidesiswanto83No ratings yet
- Prosedur Percobaan Motor SinkronSinkron Generator SinkronDocument10 pagesProsedur Percobaan Motor SinkronSinkron Generator SinkronDara AmeliaNo ratings yet
- Ig5595 00 - en GBDocument3 pagesIg5595 00 - en GBw automationNo ratings yet
- Uttarakhand Power Corporation Limited: ACCOUNT NO: 42300331992Document1 pageUttarakhand Power Corporation Limited: ACCOUNT NO: 42300331992akshaychauhanneemranaNo ratings yet
- EU Policies - E Mobility WebinarDocument10 pagesEU Policies - E Mobility WebinarMerita DemaNo ratings yet
- Comprehensive Review Protection Coordination Methods Power Distribution Systems Presence DGDocument7 pagesComprehensive Review Protection Coordination Methods Power Distribution Systems Presence DGGustavo AguayoNo ratings yet
- Standard Documentation for Float Cum Boost ChargerDocument12 pagesStandard Documentation for Float Cum Boost Chargerpitamberverma100% (1)
- 2021 Update of The Canadian CSA Z462 Electrical Safety StandardDocument49 pages2021 Update of The Canadian CSA Z462 Electrical Safety Standardachour louniNo ratings yet
- KS4 4 Inchs Borewell Submersible PumpsDocument2 pagesKS4 4 Inchs Borewell Submersible PumpsMuffy PuffinNo ratings yet
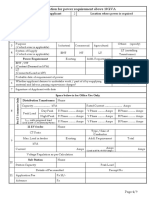
- KSEB Power Application LT FormDocument2 pagesKSEB Power Application LT FormJoel Joy100% (1)
- Smart Grid System Operation (ELEN-6108) Lec 5Document14 pagesSmart Grid System Operation (ELEN-6108) Lec 5musaNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)