You might also like
- The Grid 2: Blueprint for a New Computing InfrastructureFrom EverandThe Grid 2: Blueprint for a New Computing InfrastructureNo ratings yet
- 3-DOF Longitudinal Flight Simulation Modeling and Design Using MADocument54 pages3-DOF Longitudinal Flight Simulation Modeling and Design Using MAspbhavna100% (1)
- UavDocument17 pagesUavharideepNo ratings yet
- Final Reportof Pritam JodhaDocument71 pagesFinal Reportof Pritam JodhaSvinčnikNo ratings yet
- Skynode X DatasheetDocument30 pagesSkynode X DatasheetVenkat BhagavatiNo ratings yet
- 2013-Materials Selection in Design of Aircrafts StructuresDocument9 pages2013-Materials Selection in Design of Aircrafts StructuresMario Mantilla SánchezNo ratings yet
- Fuselage DesignDocument14 pagesFuselage Designirctcsbt6bimblikipilNo ratings yet
- Experimental and Analytical Technique For Estimating Interfacial Thermal Conductance in Composite Structural Elements Under Simulated Fire ConditionsDocument8 pagesExperimental and Analytical Technique For Estimating Interfacial Thermal Conductance in Composite Structural Elements Under Simulated Fire ConditionsJinsoo KimNo ratings yet
- Fuselage Design For Stress Caused Due To Wing at Various Load ConditionsDocument48 pagesFuselage Design For Stress Caused Due To Wing at Various Load ConditionsSri Tech Engineering100% (1)
- Longitudinal Control Law Design Flying WingDocument152 pagesLongitudinal Control Law Design Flying WingredxusNo ratings yet
- Uav PredatorDocument10 pagesUav PredatorViperous PramodNo ratings yet
- TruTrak Evolution Type II FINAL - Cleared 08aug12Document2 pagesTruTrak Evolution Type II FINAL - Cleared 08aug12smouhabNo ratings yet
- Safran in 2012 Leaflet - 2012Document12 pagesSafran in 2012 Leaflet - 2012ramsinntNo ratings yet
- Detail Part Optimization On The F-35 Joint Strike FighterDocument14 pagesDetail Part Optimization On The F-35 Joint Strike Fighterzhangshengdong100% (3)
- MQ-1 Predator DroneDocument15 pagesMQ-1 Predator DroneKrunal AriwalaNo ratings yet
- AileronsDocument3 pagesAileronsPhuong TrangNo ratings yet
- Aircraft Dynamics and SimulationDocument13 pagesAircraft Dynamics and SimulationTapan DasNo ratings yet
- Smart BombsDocument16 pagesSmart BombsKrishna KishorNo ratings yet
- SSPH 1 Primus Technical SpecsDocument5 pagesSSPH 1 Primus Technical Specstomay777No ratings yet
- CARPET BrochureDocument2 pagesCARPET BrochurejreedFPNo ratings yet
- Flight Dynamics StabilityDocument165 pagesFlight Dynamics StabilityGeorges Ghazi50% (2)
- Development of Landing GearDocument5 pagesDevelopment of Landing GearSatheesh KumarNo ratings yet
- Fuselage Structure and LoadsDocument13 pagesFuselage Structure and Loadsprashanth_anNo ratings yet
- Space Tourism Society Malaysian Chapter Spaceplane Design ContestDocument10 pagesSpace Tourism Society Malaysian Chapter Spaceplane Design ContestLiey Azim IINo ratings yet
- Unmanned Aerial VehicleDocument178 pagesUnmanned Aerial Vehicletanveershariff13No ratings yet
- Military & Aerospace Electronics - February 2019Document40 pagesMilitary & Aerospace Electronics - February 2019Anthony Van HamondNo ratings yet
- WAAPI UAV Design ReportDocument97 pagesWAAPI UAV Design ReportAbhishek ChauhanNo ratings yet
- Airships As A Low Cost Alternative To Communication SatellitesDocument14 pagesAirships As A Low Cost Alternative To Communication SatellitesReena JosephNo ratings yet
- A400M Grizzly: Strategic Delivery To The Point of NeedDocument80 pagesA400M Grizzly: Strategic Delivery To The Point of NeedjuanNo ratings yet
- Thales ELINTDocument2 pagesThales ELINTtomay777No ratings yet
- The Airframe: Eurofighter Typhoon SpecificationsDocument16 pagesThe Airframe: Eurofighter Typhoon SpecificationsValentin EmilNo ratings yet
- Eae 400Document14 pagesEae 400Ramaleela KannanNo ratings yet
- Sukhoi Design Bureau Cs W12Document4 pagesSukhoi Design Bureau Cs W12tusharvarshneyNo ratings yet
- The Definitive Guide: Unmanned Aerial Systems and Remote SensingDocument55 pagesThe Definitive Guide: Unmanned Aerial Systems and Remote SensingMary Ruth BongonNo ratings yet
- RQ-4 Block 20 Global Hawk Drone SpecsDocument5 pagesRQ-4 Block 20 Global Hawk Drone SpecsTuğba BüyüktanırNo ratings yet
- Overview of Unmanned Aircraft Systems (UAS)Document17 pagesOverview of Unmanned Aircraft Systems (UAS)Rahul KumarNo ratings yet
- Military Amp Aerospace Electronics - April 2019 PDFDocument52 pagesMilitary Amp Aerospace Electronics - April 2019 PDFmyctianNo ratings yet
- 2014 Vehicle Optronics 24S enDocument12 pages2014 Vehicle Optronics 24S enNemanja Arandjelovic100% (1)
- Thales A400M Press Kit 151209Document4 pagesThales A400M Press Kit 151209Hakimi Bob100% (2)
- Miniature UAVs & Future EW: Distributed SensingDocument13 pagesMiniature UAVs & Future EW: Distributed Sensingl k100% (2)
- Fuzzy Controller Autopilot For A Fixed Wing Unmanned Aerial VehicleDocument136 pagesFuzzy Controller Autopilot For A Fixed Wing Unmanned Aerial VehicleDominic JordanNo ratings yet
- Technical Review On Thermal Conductivity Measurement Techniques For Thin Thermal InterfacesDocument8 pagesTechnical Review On Thermal Conductivity Measurement Techniques For Thin Thermal InterfacesZahid MaqboolNo ratings yet
- Missile Technology Control Regime - HandbookDocument267 pagesMissile Technology Control Regime - HandbookHector VillarrealNo ratings yet
- Meteksan en Corporate CatalogDocument48 pagesMeteksan en Corporate CatalogBulent100% (1)
- Flamingo® MK3: OperationalDocument4 pagesFlamingo® MK3: OperationalkisariNo ratings yet
- Micro Air Vehicles Seminar1Document33 pagesMicro Air Vehicles Seminar1deepubs89No ratings yet
- RR mt30 Brochure Uk 2016 PDFDocument10 pagesRR mt30 Brochure Uk 2016 PDFFerdinandjaNo ratings yet
- Aermacchi M-346FA - Brochure - ENG - NewDocument7 pagesAermacchi M-346FA - Brochure - ENG - NewDANIEL ENRIQUE ALDANA LOPERA0% (1)
- Longitudinal Static StabilityDocument6 pagesLongitudinal Static StabilitySerdar BilgeNo ratings yet
- Gaav Uav FalcoDocument2 pagesGaav Uav Falcotomay777No ratings yet
- Rq-4 Block 20 Global Hawk: Structural FeaturesDocument5 pagesRq-4 Block 20 Global Hawk: Structural FeaturesTuğba BüyüktanırNo ratings yet
- The Last A400M For The Turaf Will Be Delivered in 2022!Document76 pagesThe Last A400M For The Turaf Will Be Delivered in 2022!Mustafa UYANIKNo ratings yet
- Penguin's Modular DesignDocument4 pagesPenguin's Modular DesignMohamed Ghazy Jr.No ratings yet
- M S 01 Intro Intro MotivationDocument13 pagesM S 01 Intro Intro MotivationBomezzZ EnterprisesNo ratings yet
- Battle Command Collapse and M&SDocument25 pagesBattle Command Collapse and M&SSzERGNo ratings yet
- Index: Aircraft Design Project - IIDocument56 pagesIndex: Aircraft Design Project - IIRohit MunaNo ratings yet
- UavDocument11 pagesUavAthul MuraliNo ratings yet
- Aircraft position reports via DGPS and Mode-SDocument44 pagesAircraft position reports via DGPS and Mode-Secd4282003No ratings yet
- Strela: Launch Vehicle User ManualDocument63 pagesStrela: Launch Vehicle User ManualbospankerNo ratings yet
- RTI MY10 en-GB tp11192Document83 pagesRTI MY10 en-GB tp11192Pedro Tati BarrosNo ratings yet
- AAI MOOC 2.1 Storyline ScriptDocument6 pagesAAI MOOC 2.1 Storyline ScriptPedro Tati BarrosNo ratings yet
- Day 1 Session 2 Marc Moffatt - International Consortium of Aeronautical Test SitesDocument15 pagesDay 1 Session 2 Marc Moffatt - International Consortium of Aeronautical Test SitesPedro Tati BarrosNo ratings yet
- Aircraft Inspection Using Unmanned Aerial VehiclesDocument7 pagesAircraft Inspection Using Unmanned Aerial VehiclesPedro Tati BarrosNo ratings yet
- Refueling AMM A320Document42 pagesRefueling AMM A320Pedro Tati BarrosNo ratings yet
- AGCS Rise of The Drones ReportDocument17 pagesAGCS Rise of The Drones ReportPedro Tati BarrosNo ratings yet
- A320neo Desenho GeralDocument1 pageA320neo Desenho GeralPedro Tati BarrosNo ratings yet
- Day 2 Workshop 6 National Regulations Karen Tarr - Canadian Unmanned Aircraft Systems RegulationsDocument10 pagesDay 2 Workshop 6 National Regulations Karen Tarr - Canadian Unmanned Aircraft Systems RegulationsPedro Tati BarrosNo ratings yet
- Day 1 Session 1 Patrick Gandil - The Take-Off of Civil RPAS Activities in FranceDocument11 pagesDay 1 Session 1 Patrick Gandil - The Take-Off of Civil RPAS Activities in FrancePedro Tati BarrosNo ratings yet
- Aircraft Profile 205 - Boeing B-17G PDFDocument21 pagesAircraft Profile 205 - Boeing B-17G PDFPedro Tati BarrosNo ratings yet
- Cesenek11 - Simulation of Compressible Viscous Flow in Time-Dependent DomainsDocument12 pagesCesenek11 - Simulation of Compressible Viscous Flow in Time-Dependent DomainsPedro Tati BarrosNo ratings yet
- Basic AerodynamicsDocument49 pagesBasic AerodynamicsJayDeep KhajureNo ratings yet
- Human Factor Handbook PDFDocument30 pagesHuman Factor Handbook PDFBela FirmantoyoNo ratings yet
- 2002 04 FAA Wire Degradation StudyDocument31 pages2002 04 FAA Wire Degradation StudyPedro Tati BarrosNo ratings yet
- Arduino ProjectsDocument46 pagesArduino Projectstecnojorge100% (7)
- Arduino Lab 1 - The Voltage DividerDocument8 pagesArduino Lab 1 - The Voltage DividerRahmat PrihartonoNo ratings yet
- Easa Ad Us-2014-05-12 1Document13 pagesEasa Ad Us-2014-05-12 1Pedro Tati BarrosNo ratings yet
- Powershift TransmissionsDocument27 pagesPowershift TransmissionsJonathanDavidDeLosSantosAdornoNo ratings yet
- August 2017Document72 pagesAugust 2017Treatment Plant Operator MagazineNo ratings yet
- Pink Fun Doodles and Blobs Math Online Class Creative Presentation SlidesCarnivalDocument28 pagesPink Fun Doodles and Blobs Math Online Class Creative Presentation SlidesCarnivalraine castorNo ratings yet
- MyPower S3220&S3320-INSTALLATIONDocument83 pagesMyPower S3220&S3320-INSTALLATIONJorge GonzalesNo ratings yet
- Yellow Electric Pump: Job Card Package Title: HIM - A318/A319/A320/ A321 Tail Number - MSN - FSN ALL ContinousDocument4 pagesYellow Electric Pump: Job Card Package Title: HIM - A318/A319/A320/ A321 Tail Number - MSN - FSN ALL ContinousSuman BajracharyaNo ratings yet
- Module 8 SAHITA ConcreteDocument11 pagesModule 8 SAHITA ConcreteHarrybfnNo ratings yet
- Write Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersDocument9 pagesWrite Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersLexi TronicsNo ratings yet
- Active Directory Command Line OneDocument9 pagesActive Directory Command Line OneSreenivasan NagappanNo ratings yet
- Hublit Limphaire Leaflet India PDFDocument2 pagesHublit Limphaire Leaflet India PDFAkshay RaiNo ratings yet
- Panasonic WJ FS616Document62 pagesPanasonic WJ FS616triliteNo ratings yet
- An70983 001-70983Document24 pagesAn70983 001-70983अमरेश झाNo ratings yet
- Computer Science: FieldsDocument2 pagesComputer Science: FieldstdoraxNo ratings yet
- Damage To Stern Tube Bearing and SealsDocument4 pagesDamage To Stern Tube Bearing and SealsJoão Henrique Volpini MattosNo ratings yet
- Surface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpsDocument22 pagesSurface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpssauroNo ratings yet
- Conveyor Chain GuideDocument59 pagesConveyor Chain GuideajaykrishnaaNo ratings yet
- Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions ManualDocument27 pagesDigital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions Manualdacdonaldnxv1zq100% (27)
- Item No. Specification Requested Offered Specifications 1.1. 1.1 Law and CertificatesDocument23 pagesItem No. Specification Requested Offered Specifications 1.1. 1.1 Law and CertificatesSaša StankovićNo ratings yet
- 38.11 Cum Total Qty of 4 Nos. Culvests 38.11x4 152.43 CumDocument14 pages38.11 Cum Total Qty of 4 Nos. Culvests 38.11x4 152.43 CumMandeep SinghNo ratings yet
- VNX Power UP Down ProcedureDocument8 pagesVNX Power UP Down ProcedureShahulNo ratings yet
- Educational Technology & Education Conferences - January To June 2016 - Clayton R WrightDocument93 pagesEducational Technology & Education Conferences - January To June 2016 - Clayton R WrightEsperanza Román MendozaNo ratings yet
- Friday Night FightsDocument8 pagesFriday Night Fightsapi-629904068No ratings yet
- ANR causes and solutionsDocument2 pagesANR causes and solutionsPRAKHAR SRIVASTAVANo ratings yet
- Transmission ImpairmentsDocument49 pagesTransmission ImpairmentsLaurentiuStanciuNo ratings yet
- Builder's Greywater Guide Branched DrainDocument4 pagesBuilder's Greywater Guide Branched DrainGreen Action Sustainable Technology GroupNo ratings yet
- PD 957 AND BP 220 HOUSING DESIGN STANDARDSDocument5 pagesPD 957 AND BP 220 HOUSING DESIGN STANDARDSGeraldine F. CalubNo ratings yet
- RCE Unpacking Ebook (Translated by LithiumLi) - UnprotectedDocument2,342 pagesRCE Unpacking Ebook (Translated by LithiumLi) - Unprotecteddryten7507No ratings yet
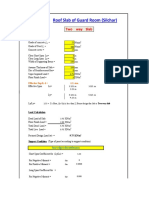
- Roof Slab of Guard RoomDocument3 pagesRoof Slab of Guard RoomAditya KumarNo ratings yet
- Ficha Tecnica 750 GPMDocument156 pagesFicha Tecnica 750 GPMByron Chele0% (2)
- ICT PresentationDocument13 pagesICT PresentationThe Leo LoverNo ratings yet
- CV Ali EzzeddineDocument3 pagesCV Ali EzzeddineOmar RajadNo ratings yet
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (50)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsFrom EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNo ratings yet
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 2.5 out of 5 stars2.5/5 (3)
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationFrom EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationRating: 1 out of 5 stars1/5 (1)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Waves and Beaches: The Powerful Dynamics of Sea and CoastFrom EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastRating: 4 out of 5 stars4/5 (1)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideFrom Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideRating: 3.5 out of 5 stars3.5/5 (7)
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeFrom EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeRating: 3.5 out of 5 stars3.5/5 (4)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)