You might also like
- Zainaib JasssimDocument9 pagesZainaib JasssimAs AdNo ratings yet
- Summer InternshipDocument71 pagesSummer InternshipUjjawal TripathiNo ratings yet
- George 2021Document21 pagesGeorge 2021Praful YadavNo ratings yet
- Journal-Tracking of A PID Driven Differential Drive Mobile Robot-2018Document15 pagesJournal-Tracking of A PID Driven Differential Drive Mobile Robot-2018Pham ThuanNo ratings yet
- PaperfiliDocument7 pagesPaperfiliLucecitho CriNo ratings yet
- 2000-A Nonlinear Disturbance ObserverDocument7 pages2000-A Nonlinear Disturbance ObserverChanel For KidsNo ratings yet
- Speed and Position Control of A DC Motor Using ATmega328Document5 pagesSpeed and Position Control of A DC Motor Using ATmega328GRD JournalsNo ratings yet
- Teach Pendant Android MobileDocument3 pagesTeach Pendant Android MobileBhavanarayana ChakkaNo ratings yet
- 00 AM 5 00 PM Optimal Control of DC MotoDocument9 pages00 AM 5 00 PM Optimal Control of DC MotoThien MaiNo ratings yet
- Jpitv02i02p2332 8Document11 pagesJpitv02i02p2332 8Kelappan NairNo ratings yet
- Cs Project1Document10 pagesCs Project1Arpan Katiyar 2K18EC043No ratings yet
- Modeling and Control of 5DOF Robot Arm Using FuzzyDocument13 pagesModeling and Control of 5DOF Robot Arm Using FuzzyAjay RajNo ratings yet
- Robust Navigational Control of a Two-Wheeled Self-Balancing Robot Using PD-PI ControllerDocument12 pagesRobust Navigational Control of a Two-Wheeled Self-Balancing Robot Using PD-PI ControllerVickey VigneshNo ratings yet
- Review of Control Systems in RoboticsDocument10 pagesReview of Control Systems in Roboticsroyson316No ratings yet
- Final Form of SynopsisDocument7 pagesFinal Form of SynopsisAbbas JaveedNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- ControlsystemsinRobotics ReviewDocument11 pagesControlsystemsinRobotics ReviewRahulNo ratings yet
- Speed Control of DC Motor Using Particle Swarm OptDocument9 pagesSpeed Control of DC Motor Using Particle Swarm OptThien MaiNo ratings yet
- PID DC Motor Speed Control Using Particle Swarm OptimizationDocument14 pagesPID DC Motor Speed Control Using Particle Swarm OptimizationApri KurniawanNo ratings yet
- Jsaer2014 01 02 55 63Document9 pagesJsaer2014 01 02 55 63jsaereditorNo ratings yet
- Self-Balancing Robot: Modeling and Comparative Analysis Between PID and Linear Quadratic RegulatorDocument9 pagesSelf-Balancing Robot: Modeling and Comparative Analysis Between PID and Linear Quadratic RegulatorIJRES teamNo ratings yet
- ControlsystemsinRobotics Review PDFDocument11 pagesControlsystemsinRobotics Review PDFTeam RaagNo ratings yet
- 1 PBDocument12 pages1 PBK JelNo ratings yet
- L13Document9 pagesL13mohmmade .zkNo ratings yet
- Design and Development of An Educational Desktop Robot R DDocument8 pagesDesign and Development of An Educational Desktop Robot R DHaile SimachewNo ratings yet
- LQR Based PID Controller Design For 3 DOF Helicopter SystemDocument6 pagesLQR Based PID Controller Design For 3 DOF Helicopter SystemwdgsNo ratings yet
- Real-time MPC Speed Control on 16-bit MicrocontrollerDocument21 pagesReal-time MPC Speed Control on 16-bit MicrocontrollerShubham JagtapNo ratings yet
- Simulation Model of ANN and PID Controller For Direct Current Servo Motor by Using Matlab/SimulinkDocument11 pagesSimulation Model of ANN and PID Controller For Direct Current Servo Motor by Using Matlab/SimulinkTELKOMNIKANo ratings yet
- PID Control System Analysis Design and TechnologyDocument18 pagesPID Control System Analysis Design and Technologyalex.yin.xjftNo ratings yet
- Arm Manipulator Position Control Based On Multi-Input Multi-Output PID StrategyDocument4 pagesArm Manipulator Position Control Based On Multi-Input Multi-Output PID StrategyMourad KattassNo ratings yet
- MIPRO2014final 1Document7 pagesMIPRO2014final 1Ali ErNo ratings yet
- Simulation of Fuzzy Logic Controller For Controlling The Position and Speedof The DC MotorDocument4 pagesSimulation of Fuzzy Logic Controller For Controlling The Position and Speedof The DC MotorIJERDNo ratings yet
- Robotic Arm Project ReportDocument49 pagesRobotic Arm Project Reportarunguptha_gsNo ratings yet
- Ieee Pid Control System Analysis Design and TechnologyDocument18 pagesIeee Pid Control System Analysis Design and TechnologydashNo ratings yet
- DSP-Based Laboratory Implementation of Hybrid Fuzzy-PID Controller Using Genetic Optimization For High-Performance Motor DrivesDocument10 pagesDSP-Based Laboratory Implementation of Hybrid Fuzzy-PID Controller Using Genetic Optimization For High-Performance Motor DrivesJulián Peláez RestrepoNo ratings yet
- Choosing Sampling Rates For Robot ControlDocument23 pagesChoosing Sampling Rates For Robot Controleren jaegerNo ratings yet
- Control System in Mechatronics - A Review: International Journal of Modern Studies in Mechanical Engineering (IJMSME)Document7 pagesControl System in Mechatronics - A Review: International Journal of Modern Studies in Mechanical Engineering (IJMSME)Ali EndrisNo ratings yet
- 2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Document5 pages2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Sachin ShindeNo ratings yet
- PID Control System Analysis, Design, and TechnologyDocument20 pagesPID Control System Analysis, Design, and TechnologyJohn XaviNo ratings yet
- Going Beyond Rigid Manipulators - A Review of Control of Exible Robotic ArmsDocument10 pagesGoing Beyond Rigid Manipulators - A Review of Control of Exible Robotic ArmsM. Abdullah KhalidNo ratings yet
- Colombo Et Al ISR-Robotik06Document12 pagesColombo Et Al ISR-Robotik06Ravikumar NagulaNo ratings yet
- Full Report ControlDocument13 pagesFull Report Controlariff aliNo ratings yet
- Position Control of AX-12 Servo Motor Using Proportional-Integral-Derivative Controller With Particle Swarm Optimization For Robotic Manipulator ApplicationDocument8 pagesPosition Control of AX-12 Servo Motor Using Proportional-Integral-Derivative Controller With Particle Swarm Optimization For Robotic Manipulator ApplicationIAES International Journal of Robotics and AutomationNo ratings yet
- Learning PID Digital Motor Control Using LaunchpadDocument6 pagesLearning PID Digital Motor Control Using LaunchpadLuis RíosNo ratings yet
- 1 PBDocument7 pages1 PBFyndi Aw AwNo ratings yet
- Octocopter SlidesDocument17 pagesOctocopter SlidesShoaib HassanNo ratings yet
- Jeas-D-23-00976 3Document18 pagesJeas-D-23-00976 3Nguyen Phan LamNo ratings yet
- Modeling and Designing of Gesture Control Robot: October 2017Document7 pagesModeling and Designing of Gesture Control Robot: October 2017Raka SinhaNo ratings yet
- Simple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveDocument11 pagesSimple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveVidhya M PNo ratings yet
- Helicopter System LQR Based PID Controller Design For - Dof: Santosh Kr. ChoudharyDocument6 pagesHelicopter System LQR Based PID Controller Design For - Dof: Santosh Kr. ChoudharyAdrianaNo ratings yet
- Optimize Servo Parameters Manipulator Robot Aerotech MotionDocument9 pagesOptimize Servo Parameters Manipulator Robot Aerotech Motionfiqri ibrahim aNo ratings yet
- Design and Performance Analysis of PID Controller For Automatic Generation Control of An Autonomous Power SystemDocument7 pagesDesign and Performance Analysis of PID Controller For Automatic Generation Control of An Autonomous Power SystemOnline 4-lifeNo ratings yet
- Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontroller BoardDocument3 pagesDesign and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontroller BoardAneetaNo ratings yet
- Mobile Robot LyaponovDocument5 pagesMobile Robot Lyaponovbmtoan5401No ratings yet
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocument7 pagesRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINo ratings yet
- PID Controller Based DC Motor Speed ControlDocument4 pagesPID Controller Based DC Motor Speed ControlEditor IJRITCCNo ratings yet
- ScaraDocument9 pagesScaraSalvatore VillaniNo ratings yet
- Position Control of Servo Motor Using Fuzzy Logic ControllerDocument12 pagesPosition Control of Servo Motor Using Fuzzy Logic ControllerMahmudul BappiNo ratings yet
- Automatic Pick and Place Robotic Arm Vehicle: IjarcceDocument3 pagesAutomatic Pick and Place Robotic Arm Vehicle: Ijarccebendali nadirNo ratings yet
- Multivariable Predictive Control: Applications in IndustryFrom EverandMultivariable Predictive Control: Applications in IndustryNo ratings yet
- Motor Testing Final PaperDocument16 pagesMotor Testing Final PaperManar HosnyNo ratings yet
- E MAX - E Max Brushless Motor Specs EE July 08Document11 pagesE MAX - E Max Brushless Motor Specs EE July 08ewaigel0% (1)
- Postdoc Cover Letter - Acc PDFDocument1 pagePostdoc Cover Letter - Acc PDFManar HosnyNo ratings yet
- A 3d Time of Flight Camera For Object DetectionDocument10 pagesA 3d Time of Flight Camera For Object DetectionThisgoldenNo ratings yet
- 23-28Document6 pages23-28Manar HosnyNo ratings yet
- 2 Four Post TutorialDocument11 pages2 Four Post TutorialManar HosnyNo ratings yet
- Getting Started Using Adams/VibrationDocument2 pagesGetting Started Using Adams/VibrationManar HosnyNo ratings yet
- Lecture 1: Course Organization and Introduction To Adaptive ControlDocument14 pagesLecture 1: Course Organization and Introduction To Adaptive ControlManar HosnyNo ratings yet
- Plant Detection and Mapping For Agricultural Robots Using A 3D LIDAR SensorDocument9 pagesPlant Detection and Mapping For Agricultural Robots Using A 3D LIDAR SensorManar HosnyNo ratings yet
- Design and Development of S.C.C.R and CoolerDocument13 pagesDesign and Development of S.C.C.R and CoolerManar HosnyNo ratings yet
- Continuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions Chap13Document42 pagesContinuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions Chap13Ricardo Gálmez100% (1)
- Signals and Systems Problems Part IIDocument9 pagesSignals and Systems Problems Part IIJeevith JeeviNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument35 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsManar HosnyNo ratings yet
- Circuits Lec07Document24 pagesCircuits Lec07Manar HosnyNo ratings yet
- Getting Started Using ADAMS ControlsDocument120 pagesGetting Started Using ADAMS ControlsKajal AgrawalNo ratings yet
- CH 18 Sect 2 Selfquiz PDFDocument3 pagesCH 18 Sect 2 Selfquiz PDFManar HosnyNo ratings yet
- Homework2 PDFDocument2 pagesHomework2 PDFManar HosnyNo ratings yet
- Chapter 6Document15 pagesChapter 6Manar HosnyNo ratings yet
- Chapter 4 Homework Solution:: P 4.2-2 Determine The Node Voltages For The Circuit of FigureDocument18 pagesChapter 4 Homework Solution:: P 4.2-2 Determine The Node Voltages For The Circuit of FigureManar HosnyNo ratings yet
- Errata PDFDocument5 pagesErrata PDFManar HosnyNo ratings yet
- Introduction To ROBOTICS: Mobot: Mobile RobotDocument50 pagesIntroduction To ROBOTICS: Mobot: Mobile RobotManar HosnyNo ratings yet
- Handout2 Kinematics-1 PDFDocument11 pagesHandout2 Kinematics-1 PDFManar HosnyNo ratings yet
- Joints: Revolute Joint (1 Dof) Translational Joint (1 DOF) Cylindrical Joint (2 Dof)Document9 pagesJoints: Revolute Joint (1 Dof) Translational Joint (1 DOF) Cylindrical Joint (2 Dof)Manar HosnyNo ratings yet
- 808M Introduction To Robot ModelingDocument2 pages808M Introduction To Robot ModelingManar HosnyNo ratings yet
- 04 Closed-Loop Inverse Kinematics Schemes For Constrained Redundant Manipulators With Task Space Argumentation and Task Priority Strategy PDFDocument7 pages04 Closed-Loop Inverse Kinematics Schemes For Constrained Redundant Manipulators With Task Space Argumentation and Task Priority Strategy PDFManar HosnyNo ratings yet
- November 2, 2006: - Bookkeeping - Presentations - Lecture "Economics of Product Development"Document60 pagesNovember 2, 2006: - Bookkeeping - Presentations - Lecture "Economics of Product Development"khurram08No ratings yet
- Solutionsmanual 150522013626 Lva1 App6891 PDFDocument242 pagesSolutionsmanual 150522013626 Lva1 App6891 PDFManar HosnyNo ratings yet
- 4 5870766809510053045Document1 page4 5870766809510053045Manar HosnyNo ratings yet
- Bee 1l1 (Bee & Bec) Lab ManualDocument39 pagesBee 1l1 (Bee & Bec) Lab ManualSanoj SureshNo ratings yet
- FB93Document35 pagesFB93Hoangvinh DuongNo ratings yet
- Yaskawa V1000 CIMR VC ManualDocument418 pagesYaskawa V1000 CIMR VC Manualdanghe2006No ratings yet
- Sony 5.1ch Home Cinema With Wireless Rear Speakers HT-S40R - AysonlineDocument2 pagesSony 5.1ch Home Cinema With Wireless Rear Speakers HT-S40R - AysonlineAhmad RazaNo ratings yet
- Knowledge Assessment Self Review Form Ka02Document43 pagesKnowledge Assessment Self Review Form Ka02Ken So100% (2)
- BOQ Nurse Communication System-Supreme/medisystem (Indian) : S.No. Description Qty Each Amount (INR) Rate (INR)Document3 pagesBOQ Nurse Communication System-Supreme/medisystem (Indian) : S.No. Description Qty Each Amount (INR) Rate (INR)aasthaNo ratings yet
- Egpu GuideDocument5 pagesEgpu GuideGerman Castorman Cortez AguileraNo ratings yet
- IBM System x3550M2 Type 7946 Installation & User GuideDocument138 pagesIBM System x3550M2 Type 7946 Installation & User GuideRay CoetzeeNo ratings yet
- Quote #1603 - Electronics Starter KitDocument1 pageQuote #1603 - Electronics Starter KitHala ItaniNo ratings yet
- Foxboro 761 Single Station ControllerDocument12 pagesFoxboro 761 Single Station ControllerisctomaslopezNo ratings yet
- Eaton Evolution ManualDocument22 pagesEaton Evolution Manualdennis39491299No ratings yet
- Joe Satriani's new AX1500G effect programsDocument9 pagesJoe Satriani's new AX1500G effect programsMuhKeyboardImitasiNo ratings yet
- Power System Control (EE-4)Document22 pagesPower System Control (EE-4)Abhishek RoshanNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument5 pagesAdvanced Power Electronics Corp.: DescriptionVladimir DoyminNo ratings yet
- Signals and Systems (2nd Edition) - Oppenheim Matlab ProjectDocument2 pagesSignals and Systems (2nd Edition) - Oppenheim Matlab ProjectdavStonerNo ratings yet
- Lab 8Document7 pagesLab 8amngreenNo ratings yet
- Solutions of Time-Independent Schrodinger EquationDocument27 pagesSolutions of Time-Independent Schrodinger EquationGanesha BookNo ratings yet
- Azbil SDC15 (Rele Metalizadora)Document236 pagesAzbil SDC15 (Rele Metalizadora)Rafael OliveiraNo ratings yet
- Lab 13 (HMT) - 14Document6 pagesLab 13 (HMT) - 14Hussain MuslimNo ratings yet
- Manual de Power SuplyDocument6 pagesManual de Power SuplyCesar CelestinoNo ratings yet
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 pagesLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafNo ratings yet
- Ring Main Unit Siemens 8dhjst IndiaDocument33 pagesRing Main Unit Siemens 8dhjst Indialehaphuong03No ratings yet
- Contamination Control Through Room PressurisationDocument5 pagesContamination Control Through Room PressurisationAnkit JainNo ratings yet
- Segmentation - PreethiDocument30 pagesSegmentation - Preethinishaudayshankar34No ratings yet
- Reg. No. III SEMESTER B.TECH (ELECTRICAL & ELECTRONICS ENGINEERING) END SEMESTER EXAMINATIONS, NOV/DEC 2015Document3 pagesReg. No. III SEMESTER B.TECH (ELECTRICAL & ELECTRONICS ENGINEERING) END SEMESTER EXAMINATIONS, NOV/DEC 2015Abhijit BiswasNo ratings yet
- Design and Simulation of Planar Archimedean Spiral AntennaDocument4 pagesDesign and Simulation of Planar Archimedean Spiral AntennaHieu NgNo ratings yet
- Atomic Absorption Spectroscopy Practice ProblemsDocument14 pagesAtomic Absorption Spectroscopy Practice ProblemsKassimNo ratings yet
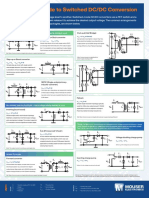
- Reference Guide To Switched DC/DC ConversionDocument1 pageReference Guide To Switched DC/DC ConversionLQ530No ratings yet
- d301244x012 PDFDocument330 pagesd301244x012 PDFFIRMANSYAH100% (1)
- Instant Power Supply (IPS) System With Load PriorityDocument60 pagesInstant Power Supply (IPS) System With Load PriorityTania Marzia100% (3)