You might also like
- Birth and Poisson Processes: Olivier ScailletDocument31 pagesBirth and Poisson Processes: Olivier ScailletlucasNo ratings yet
- CRC - Basic.Analysis - IV.Measure - Theory.and - Integration.1138055115 PDFDocument501 pagesCRC - Basic.Analysis - IV.Measure - Theory.and - Integration.1138055115 PDFharimotoNo ratings yet
- M Thamban Nair - Measure and Integration - A First Course (2019, Chapman and Hall - CRC) PDFDocument216 pagesM Thamban Nair - Measure and Integration - A First Course (2019, Chapman and Hall - CRC) PDFlucas100% (1)
- 98 Ponte Etc (CIEAEM)Document13 pages98 Ponte Etc (CIEAEM)May Ann Gordo-CaballeroNo ratings yet
- Time-Varying Volatility in Bitcoin Market and Information Flow at Minute-Level FrequencyDocument13 pagesTime-Varying Volatility in Bitcoin Market and Information Flow at Minute-Level FrequencylucasNo ratings yet
- 1 s2.0 S0047259X83710109 MainDocument12 pages1 s2.0 S0047259X83710109 MainlucasNo ratings yet
- MiraDocument426 pagesMirakurisu_jpNo ratings yet
- (Appunti - Lecture Notes, 10) Ambrosio L., Da Prato G., Mennucci A. - Introduction To Measure Theory and Integration-Edizioni Della Normale (2011)Document193 pages(Appunti - Lecture Notes, 10) Ambrosio L., Da Prato G., Mennucci A. - Introduction To Measure Theory and Integration-Edizioni Della Normale (2011)Cristhian Paúl Neyra SalvadorNo ratings yet
- 18 CBM 91 04Document124 pages18 CBM 91 04lucasNo ratings yet
- A Combined Mathematics Laboratory and Classroom enDocument28 pagesA Combined Mathematics Laboratory and Classroom enlucasNo ratings yet
- A User-Friendly Introduction To Lebesgue Measure and IntegrationDocument233 pagesA User-Friendly Introduction To Lebesgue Measure and Integrationgomson100% (3)
- Kopp E., Malczak J., Zastawniak T. - Probability For Finance-CUP (2013) PDFDocument198 pagesKopp E., Malczak J., Zastawniak T. - Probability For Finance-CUP (2013) PDFdataNo ratings yet
- 10 Steps To Earning Awesome GradesDocument88 pages10 Steps To Earning Awesome GradesKamal100% (7)
- Dynamic Differential Geometry in EducationDocument13 pagesDynamic Differential Geometry in EducationlucasNo ratings yet
- 1413 4152 Esa 21 01 00139Document13 pages1413 4152 Esa 21 01 00139lucasNo ratings yet
- Curvature Functions On A One-Sheeted Hyperboloid: Boris OdehnalDocument17 pagesCurvature Functions On A One-Sheeted Hyperboloid: Boris OdehnallucasNo ratings yet
- Geogebra ExportDocument1 pageGeogebra ExportlucasNo ratings yet
- Good Math WritingDocument4 pagesGood Math Writingakr_659No ratings yet
- R Linear Model ExamplesDocument4 pagesR Linear Model ExampleslucasNo ratings yet
- Mathematical Knowledge For Teaching and Visualizing Differential GeometryDocument56 pagesMathematical Knowledge For Teaching and Visualizing Differential GeometrylucasNo ratings yet
- Pigeonhole 2Document4 pagesPigeonhole 2Ml PhilNo ratings yet
- Applying Scratch Programming To Facilitate Teaching in K 12 ClassroomsDocument9 pagesApplying Scratch Programming To Facilitate Teaching in K 12 ClassroomslucasNo ratings yet
- ARTIGO ModelingWaterMovement PDFDocument6 pagesARTIGO ModelingWaterMovement PDFlucasNo ratings yet
- Ph-Alkalinity - Co2Document4 pagesPh-Alkalinity - Co2Hafiz As'adNo ratings yet
- Ecological Society of AmericaDocument6 pagesEcological Society of AmericalucasNo ratings yet
- Calculus: Roles, Relevance & ReformDocument10 pagesCalculus: Roles, Relevance & ReformlucasNo ratings yet
- TX RealAnalysisDocument29 pagesTX RealAnalysislucasNo ratings yet
- NHCC NewtonDocument30 pagesNHCC NewtonlucasNo ratings yet
- Documentation ExampleDocument136 pagesDocumentation ExampleKihe FreetyNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ASCE Snow Loads On Solar-Paneled RoofsDocument61 pagesASCE Snow Loads On Solar-Paneled RoofsBen100% (1)
- 3.1 - Sequences and SeriesxbxhhdDocument92 pages3.1 - Sequences and SeriesxbxhhdHelloNo ratings yet
- Aircraft Design Course PhillStocking 4.2Document48 pagesAircraft Design Course PhillStocking 4.2ugurugur1982No ratings yet
- Rac Question PaperDocument84 pagesRac Question PaperibrahimNo ratings yet
- Psychology 114: Chapters 3 & 4Document18 pagesPsychology 114: Chapters 3 & 4Grace AndersonNo ratings yet
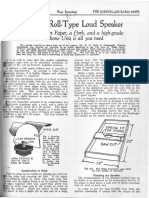
- Simple Roll-Type: A Loud SpeakerDocument1 pageSimple Roll-Type: A Loud SpeakerEudes SilvaNo ratings yet
- ZhentarimDocument4 pagesZhentarimLeonartNo ratings yet
- Milviz F-15e Poh V 2Document499 pagesMilviz F-15e Poh V 2Jose Ramon Martinez GutierrezNo ratings yet
- Biologically Active Compounds From Hops and Prospects For Their Use - Karabín 2016Document26 pagesBiologically Active Compounds From Hops and Prospects For Their Use - Karabín 2016Micheli Legemann MonteNo ratings yet
- 20160323014547-16MnCr5 - 16MnCrS5Document1 page20160323014547-16MnCr5 - 16MnCrS5Chaitanya DattaNo ratings yet
- Method Statement For Cable Trays & Cable Ladders InstallationDocument7 pagesMethod Statement For Cable Trays & Cable Ladders InstallationJamal Budeiri0% (1)
- By This Axe I Rule!Document15 pagesBy This Axe I Rule!storm0% (1)
- Siprotec 7ut82 ProfileDocument2 pagesSiprotec 7ut82 ProfileOliver Atahuichi TorrezNo ratings yet
- Listening - Homework 2: Brushes 285 RamdhanieDocument4 pagesListening - Homework 2: Brushes 285 RamdhanieBao Tran NguyenNo ratings yet
- Complete Processing Lines For Extruded Pet FoodDocument13 pagesComplete Processing Lines For Extruded Pet FoodденисNo ratings yet
- Understanding Bernoulli's Principle Through Simulations PDFDocument4 pagesUnderstanding Bernoulli's Principle Through Simulations PDFIoannis GaroufalidisNo ratings yet
- Viscous Fluid Flow Frank M White Third Edition - Compress PDFDocument4 pagesViscous Fluid Flow Frank M White Third Edition - Compress PDFDenielNo ratings yet
- ME 352 Design of Machine Elements: Lab ReportDocument5 pagesME 352 Design of Machine Elements: Lab ReportKeshav VermaNo ratings yet
- Hot Topic 02 Good Light Magazine 56smDocument24 pagesHot Topic 02 Good Light Magazine 56smForos IscNo ratings yet
- Adaptive Cruise ControlDocument5 pagesAdaptive Cruise ControlIJIRSTNo ratings yet
- A Tired BrainDocument3 pagesA Tired BrainSivasonNo ratings yet
- BECO UACE Chem2Document6 pagesBECO UACE Chem2EMMANUEL BIRUNGINo ratings yet
- 40 RT-flex Control-System Rev01Document68 pages40 RT-flex Control-System Rev01Mayvon Botelho100% (2)
- The Unofficial Aterlife GuideDocument33 pagesThe Unofficial Aterlife GuideIsrael Teixeira de AndradeNo ratings yet
- Statistics and Probability Module 3Document3 pagesStatistics and Probability Module 3Eftychia LeegleeNo ratings yet
- LPG GasDocument39 pagesLPG Gasv prasanthNo ratings yet
- Eating With Chloe Lets EatDocument150 pagesEating With Chloe Lets Eatemily.jarrodNo ratings yet
- PTP S3Document8 pagesPTP S3Yongyin SHENGNo ratings yet
- Abdominal Examination OSCE GuideDocument30 pagesAbdominal Examination OSCE Guideزياد سعيدNo ratings yet