You might also like
- Control and Optimization Meet The Smart Power Grid: Scheduling of Power Demands For Optimal Energy ManagementDocument9 pagesControl and Optimization Meet The Smart Power Grid: Scheduling of Power Demands For Optimal Energy ManagementKameshwar PoollaNo ratings yet
- Smart Grid Integration With Electric Vehicle To Make Optimum Profit To The User HandDocument8 pagesSmart Grid Integration With Electric Vehicle To Make Optimum Profit To The User HandOSD PresidentNo ratings yet
- 3rd Paper PDFDocument8 pages3rd Paper PDFMuhammad Asghar KhanNo ratings yet
- Combined Operations of Renewable Energy Systems and Responsive Demand in A Smart GridDocument9 pagesCombined Operations of Renewable Energy Systems and Responsive Demand in A Smart GridcanelengresNo ratings yet
- Research Action Plane For Doctoral StudyDocument16 pagesResearch Action Plane For Doctoral StudyGetie Tesfaye ZelieNo ratings yet
- A Knowledge Management Platform For Supporting Smart Grids Based On Peer To Peer and Service Oriented Architecture TechnologiesDocument6 pagesA Knowledge Management Platform For Supporting Smart Grids Based On Peer To Peer and Service Oriented Architecture TechnologiesfkazasisNo ratings yet
- Optimal Distributed Generation Allocation in MV Distribution Networks - 2001Document6 pagesOptimal Distributed Generation Allocation in MV Distribution Networks - 2001jorgeage2No ratings yet
- PHD Research Proposal (Electrical Power & Energy Engineering) PDFDocument13 pagesPHD Research Proposal (Electrical Power & Energy Engineering) PDFSaraMuzaffar33% (3)
- Electrical Power and Energy Systems: Anusha Pillay, S. Prabhakar Karthikeyan, D.P. KothariDocument8 pagesElectrical Power and Energy Systems: Anusha Pillay, S. Prabhakar Karthikeyan, D.P. KothariHAMZA KHANNo ratings yet
- Full Report On "VEHICLE TO GRID TECHNOLOGY (V2G) "Document35 pagesFull Report On "VEHICLE TO GRID TECHNOLOGY (V2G) "Rahul Garg67% (3)
- Peak Load Curtailment in A Smart Grid Via Fuzzy System ApproachDocument8 pagesPeak Load Curtailment in A Smart Grid Via Fuzzy System ApproachAhmed WestministerNo ratings yet
- 1 s2.0 S2095809922001345 MainDocument12 pages1 s2.0 S2095809922001345 MainAira XantophylNo ratings yet
- Ev1 PDFDocument6 pagesEv1 PDFSrinivas SirimullaNo ratings yet
- Dist GeneratorsDocument8 pagesDist GeneratorsMinn HtutNo ratings yet
- How EV Charging Strategies Impact GridsDocument10 pagesHow EV Charging Strategies Impact GridsSumit RathorNo ratings yet
- Un Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosDocument10 pagesUn Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosJULIETTE XIMENA SANCHEZ HUERTASNo ratings yet
- Congestion Management in Deregulated Power System: A ReviewDocument7 pagesCongestion Management in Deregulated Power System: A ReviewGJESRNo ratings yet
- Comparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityDocument10 pagesComparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityAdriana Q.No ratings yet
- Model Predictive Control For Building Active Demand Respon - 2015 - Energy ProceDocument10 pagesModel Predictive Control For Building Active Demand Respon - 2015 - Energy ProcePablo gilNo ratings yet
- Using AC Optimal Power Flow For DG Planning and OptimisationDocument7 pagesUsing AC Optimal Power Flow For DG Planning and OptimisationAhmed WestministerNo ratings yet
- Smart Grid Technology Seminar ReportDocument36 pagesSmart Grid Technology Seminar ReportSwamy Jagari67% (3)
- A Decentralised Energy Trading Architecture For Future Smart Grid Load B..Document7 pagesA Decentralised Energy Trading Architecture For Future Smart Grid Load B..yisakabera123No ratings yet
- Constraint - Based Maintenance Scheduling On AnDocument14 pagesConstraint - Based Maintenance Scheduling On AnNaveen KumarNo ratings yet
- Electric Power Systems Research: SciencedirectDocument1 pageElectric Power Systems Research: SciencedirectronalsanchezNo ratings yet
- International Journal of Multidisciplinary Research and Growth EvaluationDocument8 pagesInternational Journal of Multidisciplinary Research and Growth EvaluationJames UjamNo ratings yet
- Real-Time Central Demand Response For Primary Frequency Regulation in MicrogridsDocument9 pagesReal-Time Central Demand Response For Primary Frequency Regulation in Microgrids98_kingsukNo ratings yet
- Electric Load Management and Information TechnologyDocument5 pagesElectric Load Management and Information TechnologyNizar NizarooNo ratings yet
- Reconfiguration of MV Distribution Networks With Multicost and Multipoint Alternative Supply, Part II Reconfiguration Plan 2017490216Document7 pagesReconfiguration of MV Distribution Networks With Multicost and Multipoint Alternative Supply, Part II Reconfiguration Plan 2017490216sanafayaz12No ratings yet
- Important 23 PDFDocument6 pagesImportant 23 PDFMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Prosumer Bidding and Scheduling in Electricity MarketsDocument16 pagesProsumer Bidding and Scheduling in Electricity MarketsAtiquzzaman ShomaNo ratings yet
- International Conference on Renewable Power Generation (RPG) 19–20 October 2017Document5 pagesInternational Conference on Renewable Power Generation (RPG) 19–20 October 2017dan_intel6735No ratings yet
- Kang 2014Document10 pagesKang 2014hadiNo ratings yet
- Combined Operations of Renewable Energy Systems and Responsive Demand in A Smart GridDocument9 pagesCombined Operations of Renewable Energy Systems and Responsive Demand in A Smart GridDARPANNo ratings yet
- Model Predictive Control of Voltages in Active Distribution NetworksDocument10 pagesModel Predictive Control of Voltages in Active Distribution NetworksDiogo MarujoNo ratings yet
- Mitigating The Impact of Distributed PV in A Low-Voltage Grid Using Electricity TariffsDocument8 pagesMitigating The Impact of Distributed PV in A Low-Voltage Grid Using Electricity TariffsM8ow6fNo ratings yet
- Grids of The Future: Presented By: Rukmini Deshpande Niranjan TawareDocument14 pagesGrids of The Future: Presented By: Rukmini Deshpande Niranjan TawareNiranjan TawareNo ratings yet
- Relevance of Voltage Control, Grid Reconfiguration and Adaptive Protection in Smart Grids and Genetic Algorithm As An Optimization Tool in Achieving Their Control ObjectivesDocument6 pagesRelevance of Voltage Control, Grid Reconfiguration and Adaptive Protection in Smart Grids and Genetic Algorithm As An Optimization Tool in Achieving Their Control ObjectivesSaranya VenkataramanNo ratings yet
- Smart Home Energy Management System ReviewDocument7 pagesSmart Home Energy Management System ReviewAdhitya Rahman DwitomoNo ratings yet
- SMART GRID Seminar ReportDocument21 pagesSMART GRID Seminar ReportPriyankaNo ratings yet
- Report on smart grid technology and benefitsDocument21 pagesReport on smart grid technology and benefitsSalil Kumar Gautam56% (9)
- Real Time Energy Management in Smart GridDocument9 pagesReal Time Energy Management in Smart GridirwintilsonNo ratings yet
- Power Flow Analysis in Smart Grid Network For EV InfrastructureDocument12 pagesPower Flow Analysis in Smart Grid Network For EV InfrastructureMichael MufambaNo ratings yet
- A Useful Power Open Market Solution For Power Investment Strategies Using The IEEE 30 Bus SystemDocument6 pagesA Useful Power Open Market Solution For Power Investment Strategies Using The IEEE 30 Bus Systemyafei maNo ratings yet
- Congestion Management in Power System - A ReviewDocument6 pagesCongestion Management in Power System - A ReviewFenhia RivasNo ratings yet
- 1 s2.0 S0378779615001637 MainDocument9 pages1 s2.0 S0378779615001637 MainJoão PedroNo ratings yet
- Demand-Side ManagementDocument6 pagesDemand-Side Managementluca2527No ratings yet
- Diagnosis of The Implementation of Smart Grid Innovation in The NetherlandsDocument20 pagesDiagnosis of The Implementation of Smart Grid Innovation in The NetherlandsK3L ULP KSPNo ratings yet
- Probabilistic Day-Ahead Simultaneous Active-Reactive Power ManagementDocument12 pagesProbabilistic Day-Ahead Simultaneous Active-Reactive Power ManagementAlex PANo ratings yet
- List of Figures Title Page No: Chapter-1Document22 pagesList of Figures Title Page No: Chapter-1shiv2685No ratings yet
- Energies: Reliability Enhancement in Power Networks Under Uncertainty From Distributed Energy ResourcesDocument24 pagesEnergies: Reliability Enhancement in Power Networks Under Uncertainty From Distributed Energy ResourcesAli HadiNo ratings yet
- Optimizing Electric Vehicle Charging: A Customer's PerspectiveDocument9 pagesOptimizing Electric Vehicle Charging: A Customer's PerspectiveSaqib AkhtarNo ratings yet
- Grid-Connected EV Charging With Renewable Energy Integration in Parking LotsDocument64 pagesGrid-Connected EV Charging With Renewable Energy Integration in Parking LotsGHANSHYAM MEENANo ratings yet
- Microgrid Transactive Energy Systems Reviewed With Distributed Ledger and Market AnalysesDocument23 pagesMicrogrid Transactive Energy Systems Reviewed With Distributed Ledger and Market AnalysesMiguel JuarezNo ratings yet
- A Fair Load Sharing Approach Based On Microgrid Clusters and Transactive Energy ConceptDocument4 pagesA Fair Load Sharing Approach Based On Microgrid Clusters and Transactive Energy ConceptMuhammad ShahzadNo ratings yet
- Chapter-1 What Is A Smart Grid?Document44 pagesChapter-1 What Is A Smart Grid?sweetypie1622100% (1)
- GD Embedded in Iraqi Power GridDocument15 pagesGD Embedded in Iraqi Power GridHassan Ali Al SsadiNo ratings yet
- Optimization of Ancillary Services For System SecurityDocument8 pagesOptimization of Ancillary Services For System Securityjjm_8679641No ratings yet
- Applied SciencesDocument17 pagesApplied Sciencesvkr tsNo ratings yet
- Joint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkFrom EverandJoint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkNo ratings yet
- (Popular Woodworking) Robert W. Lang-Classic Arts and Crafts Furniture - 14 Timeless Designs-Popular Woodworking Books (2013)Document162 pages(Popular Woodworking) Robert W. Lang-Classic Arts and Crafts Furniture - 14 Timeless Designs-Popular Woodworking Books (2013)H SHABANA100% (7)
- Replace Old PlumbingDocument103 pagesReplace Old PlumbingvivaaemulusNo ratings yet
- Siding, Roofing, and Trim Completely Revised and UpdatedDocument240 pagesSiding, Roofing, and Trim Completely Revised and Updateddapsidu100% (4)
- Fluarc: Frame For Circuit - BreakerDocument18 pagesFluarc: Frame For Circuit - BreakerIsrael JosueNo ratings yet
- Instructions For Use: Circuit BreakersDocument52 pagesInstructions For Use: Circuit BreakersIsrael JosueNo ratings yet
- Digital Signal and Image Processing Using Matlab. Gerard Blanchet and Maurice Charbit PDFDocument764 pagesDigital Signal and Image Processing Using Matlab. Gerard Blanchet and Maurice Charbit PDFRicardoSalazarEscalanteNo ratings yet
- Fluke 1550C PDFDocument2 pagesFluke 1550C PDFYit Sin WongNo ratings yet
- Operator'S Manual Manuel de L'Utilisateur Manual Del OperadorDocument20 pagesOperator'S Manual Manuel de L'Utilisateur Manual Del OperadorIsrael JosueNo ratings yet
- Quotation NoDocument8 pagesQuotation NoIsrael JosueNo ratings yet
- 2013 Algoritma Evolusi ModulDocument7 pages2013 Algoritma Evolusi ModulFazriPasaribuNo ratings yet
- Quotation NoDocument8 pagesQuotation NoIsrael JosueNo ratings yet
- 2013 Algoritma Evolusi ModulDocument7 pages2013 Algoritma Evolusi ModulFazriPasaribuNo ratings yet
- Operator'S Manual Manuel de L'Utilisateur Manual Del OperadorDocument20 pagesOperator'S Manual Manuel de L'Utilisateur Manual Del OperadorIsrael JosueNo ratings yet
- Quotation NoDocument8 pagesQuotation NoIsrael JosueNo ratings yet
- 3 033 R002 LeakPointer EnglishDocument12 pages3 033 R002 LeakPointer EnglishAnonymous u0wETydFNo ratings yet
- GDTE en PDFDocument80 pagesGDTE en PDFIsrael JosueNo ratings yet
- Instructions For Use: Circuit BreakersDocument52 pagesInstructions For Use: Circuit BreakersIsrael JosueNo ratings yet
- Fluarc: Frame For Circuit - BreakerDocument18 pagesFluarc: Frame For Circuit - BreakerIsrael JosueNo ratings yet
- Diagnostic Insulation Testing Digest 5 and 10 KV PDFDocument2 pagesDiagnostic Insulation Testing Digest 5 and 10 KV PDFIsrael JosueNo ratings yet
- Quotation NoDocument8 pagesQuotation NoIsrael JosueNo ratings yet
- 3 033 R002 LeakPointer EnglishDocument12 pages3 033 R002 LeakPointer EnglishAnonymous u0wETydFNo ratings yet
- Megger DET14 DET24 An en V 01Document16 pagesMegger DET14 DET24 An en V 01costelchelariuNo ratings yet
- DLRO Guide V01 - LR PDFDocument48 pagesDLRO Guide V01 - LR PDFIsrael Josue0% (1)
- Fluke 1550C PDFDocument2 pagesFluke 1550C PDFYit Sin WongNo ratings yet
- FRAX101-1 WP en V01 PDFDocument5 pagesFRAX101-1 WP en V01 PDFIsrael JosueNo ratings yet
- Earth electrode and earth loop impedance testingDocument40 pagesEarth electrode and earth loop impedance testingIqbal UsmaniNo ratings yet
- Wind Turbine Test Leads For Low Resistance Ohmmeter: Megger Is A Registered Trademark Megger Is A Registered TrademarkDocument4 pagesWind Turbine Test Leads For Low Resistance Ohmmeter: Megger Is A Registered Trademark Megger Is A Registered TrademarkIsrael JosueNo ratings yet
- 200771034820Document12 pages200771034820Carlos RodasNo ratings yet
- Earth Leakage Clamp Applications Application NoteDocument2 pagesEarth Leakage Clamp Applications Application NoteIsrael JosueNo ratings yet
- The Art of Electrode TestingDocument7 pagesThe Art of Electrode TestingBert De BorjaNo ratings yet
- Exide Battery - Price List May 2011Document7 pagesExide Battery - Price List May 2011dipakishereNo ratings yet
- PMC-670 English Datasheet (20151026)Document8 pagesPMC-670 English Datasheet (20151026)Ronald H SantosNo ratings yet
- Control System ComponentsDocument29 pagesControl System Componentsshreemanti0% (1)
- What Is Ohmic HeatingDocument3 pagesWhat Is Ohmic HeatingRamanujam O SNo ratings yet
- ARIA SOHO Installation ManualDocument66 pagesARIA SOHO Installation ManualxelavNo ratings yet
- VFTO Simulation and Testing For 500 KV and 800 KV GIS DisconnectorsDocument10 pagesVFTO Simulation and Testing For 500 KV and 800 KV GIS Disconnectorsjegadeesh kumarNo ratings yet
- CH 7Document53 pagesCH 7Gautam TamangNo ratings yet
- BANNARI AMMAN INSTITUTE OF TECHNOLOGY ELECTRON DEVICES AND CIRCUITS LABDocument3 pagesBANNARI AMMAN INSTITUTE OF TECHNOLOGY ELECTRON DEVICES AND CIRCUITS LABnandhakumarmeNo ratings yet
- FC300 Service ManualDocument207 pagesFC300 Service Manualdaovanthanh_bk200786% (7)
- Manual de Servicio Samsung SRL 3626BDocument51 pagesManual de Servicio Samsung SRL 3626BEddie Reconco50% (2)
- Sensata Fact SheetDocument2 pagesSensata Fact SheetVenugopal SikhaNo ratings yet
- PsimDocument4 pagesPsimR.SRIKANTHNo ratings yet
- Modulating Control Valve PN16 With Magnetic Actuat - enDocument6 pagesModulating Control Valve PN16 With Magnetic Actuat - enMouhab HassanNo ratings yet
- Distortion in AmplifiersDocument6 pagesDistortion in AmplifiersvikasNo ratings yet
- System Overview Emerson Network PowerDocument100 pagesSystem Overview Emerson Network PowersmnguyenNo ratings yet
- 3S MTDocument9 pages3S MTThomas GarzaNo ratings yet
- En Data Sheet 2236Document6 pagesEn Data Sheet 2236Equipe FCNo ratings yet
- Unica - Svi Uredjaji Ramovi Unica Basic, Colors, Allegro, PLDocument24 pagesUnica - Svi Uredjaji Ramovi Unica Basic, Colors, Allegro, PLurcoadNo ratings yet
- LM2991 Negative Low-Dropout Adjustable Regulator: 1 Features 3 DescriptionDocument27 pagesLM2991 Negative Low-Dropout Adjustable Regulator: 1 Features 3 DescriptionzluiznetoNo ratings yet
- Motor ProtectionDocument34 pagesMotor Protectionmanirup_tceNo ratings yet
- ConSol SR208CDocument31 pagesConSol SR208CRatioterm Energii RegenerabileNo ratings yet
- Byv 26 DGPDocument5 pagesByv 26 DGPmuhammedasifNo ratings yet
- BG Affordable 2014Document115 pagesBG Affordable 2014energiculNo ratings yet
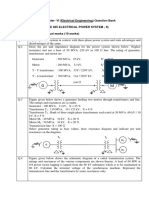
- BE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Document5 pagesBE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Adesh Bhortakke100% (1)
- Bang Gia SelecDocument7 pagesBang Gia Selecking0deuNo ratings yet
- GPNY - GuideInfo - Machinery - UL Product IqDocument4 pagesGPNY - GuideInfo - Machinery - UL Product IqKarthik VeeNo ratings yet
- ModelDocument2 pagesModelAnbalagan GuruNo ratings yet
- Lecture # 1Document28 pagesLecture # 1PhD EENo ratings yet
- Lead Times Rockwell Automation 2023-03-29Document3 pagesLead Times Rockwell Automation 2023-03-29Omar Alfredo Del Castillo QuispeNo ratings yet
- Rad-226b Service ManualDocument65 pagesRad-226b Service ManualFrancisco Orozco100% (1)