You might also like
- Analytical Modeling of Wireless Communication SystemsFrom EverandAnalytical Modeling of Wireless Communication SystemsNo ratings yet
- Jurnal Inggris 9Document12 pagesJurnal Inggris 9Diah ChinthaNo ratings yet
- Simulating Cannonball Flight in AtmosphereDocument16 pagesSimulating Cannonball Flight in AtmosphereSandeepNo ratings yet
- Verification of Road Accident Simulation Created WDocument11 pagesVerification of Road Accident Simulation Created WKiran KumarNo ratings yet
- Chasis Assignment 2Document8 pagesChasis Assignment 2Sandeep MaddyNo ratings yet
- Coursework RocketDocument5 pagesCoursework RocketAbdul QadirNo ratings yet
- Measurement and Simulation of The Flow Field Around A Triangular Lattice Meteorological MastDocument6 pagesMeasurement and Simulation of The Flow Field Around A Triangular Lattice Meteorological Mastweibull2000No ratings yet
- A Flow Analysis of Small Craft by Using CFDDocument8 pagesA Flow Analysis of Small Craft by Using CFDRakesh NnvNo ratings yet
- Exp (04) - Free Fall-Lab ReportDocument8 pagesExp (04) - Free Fall-Lab ReportgmmaroandamsaltyNo ratings yet
- Report On Dynamics and Trajectory of Shuttle Cock in BadmintonDocument13 pagesReport On Dynamics and Trajectory of Shuttle Cock in Badmintonvinoo13No ratings yet
- Breadth Cam Profile Design With Oscillating Roller Follower: August 2010Document8 pagesBreadth Cam Profile Design With Oscillating Roller Follower: August 2010Tri PujiyantoNo ratings yet
- Modeling of A Three Wheeled Omnidirectional Robot Including Friction ModelsDocument6 pagesModeling of A Three Wheeled Omnidirectional Robot Including Friction ModelsAli EbNo ratings yet
- A604 PDFDocument4 pagesA604 PDFJinsan JinsanNo ratings yet
- Iit-Jam PhviiiDocument16 pagesIit-Jam PhviiiAshishNo ratings yet
- Comparative Analysis of Tuning Missile Autopilots Using Intelligent MethodsDocument8 pagesComparative Analysis of Tuning Missile Autopilots Using Intelligent MethodsDiamoundDomeProgram R&DNo ratings yet
- Full Control of A QuadrotorDocument6 pagesFull Control of A QuadrotorLuis Orlando Silva VásquezNo ratings yet
- 200 - FEM Based Structural Analysis of Quadcopter UAV Chassis Produced With 3D Printer - 2020Document9 pages200 - FEM Based Structural Analysis of Quadcopter UAV Chassis Produced With 3D Printer - 2020OKA FATRANo ratings yet
- Actuators: Getting Started With Peas-Based Flapping-Wing Mechanisms For Micro Aerial SystemsDocument17 pagesActuators: Getting Started With Peas-Based Flapping-Wing Mechanisms For Micro Aerial SystemsArman AsgharpoorNo ratings yet
- Flying Quality Study Under The Inflence of Clear Air TurbulenceDocument7 pagesFlying Quality Study Under The Inflence of Clear Air Turbulencespams20035571No ratings yet
- Jest Physics 2017Document10 pagesJest Physics 2017Kritiraj KalitaNo ratings yet
- Drill Holes and BlastholesDocument15 pagesDrill Holes and BlastholesKevin RiosNo ratings yet
- Calculation and Analysis of Gyroplane Trimming CharacteristicsDocument8 pagesCalculation and Analysis of Gyroplane Trimming CharacteristicsYhoanColmenaresNo ratings yet
- Lecture Sheet 1Document32 pagesLecture Sheet 1SM Muntasir SarwarNo ratings yet
- فيزياء 1Document67 pagesفيزياء 1Yousof AzzamNo ratings yet
- Comparison of Turbulence Models For Flow Past Naca0015 Airfoil Using OpenfoamDocument15 pagesComparison of Turbulence Models For Flow Past Naca0015 Airfoil Using OpenfoamMalik NaweratNo ratings yet
- Thrust Enhancement of A Convergent-Divergent Nozzle by Using CFDDocument9 pagesThrust Enhancement of A Convergent-Divergent Nozzle by Using CFDsalman khanNo ratings yet
- Catt Technical Report No. 02-02-01: Adaptive Sliding Mode Control Design For A Hypersonic Flight VehicleDocument16 pagesCatt Technical Report No. 02-02-01: Adaptive Sliding Mode Control Design For A Hypersonic Flight VehicleDivya KrishnanNo ratings yet
- DTGDocument9 pagesDTGkapilkumar18No ratings yet
- Rectiliner Motion English Exercise - HLP zZ0YsuKDocument3 pagesRectiliner Motion English Exercise - HLP zZ0YsuKAditya RajputNo ratings yet
- Rectilinear Motion Problems and SolutionsDocument3 pagesRectilinear Motion Problems and SolutionsrgNo ratings yet
- Nonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationDocument5 pagesNonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationNirmal KushwahaNo ratings yet
- Unsteady Numerical Drag Estimation For A Pitching Non-Winged Reentry VehicleDocument8 pagesUnsteady Numerical Drag Estimation For A Pitching Non-Winged Reentry Vehiclemostafakhalil.mtcNo ratings yet
- JEST Physics Full Solved Sample PaperDocument39 pagesJEST Physics Full Solved Sample Paperiswaleha100% (1)
- HW1 Airsoft Round AerodynamicsDocument3 pagesHW1 Airsoft Round Aerodynamicshamza balNo ratings yet
- GI LAB Manual PDFDocument25 pagesGI LAB Manual PDFasdfghjNo ratings yet
- +1 Phy QP March 2020 - 230310 - 192935Document17 pages+1 Phy QP March 2020 - 230310 - 192935aditcminecraft.comNo ratings yet
- Projectile MotionDocument11 pagesProjectile MotionRamachandran VenkateshNo ratings yet
- CW ResitDocument6 pagesCW ResitSyed Muhammad AlamNo ratings yet
- ALP Response and StabilityDocument8 pagesALP Response and StabilityvigambetkarNo ratings yet
- Experimental Investigation of 3D Velocity by Tomographic Particle Image Velocimetry (Tomo-PIV) in A Short Riser SectionDocument7 pagesExperimental Investigation of 3D Velocity by Tomographic Particle Image Velocimetry (Tomo-PIV) in A Short Riser SectionFrancisco OppsNo ratings yet
- Ashis 2019Document5 pagesAshis 2019Pedro Cezar Rodrigues BaltazarNo ratings yet
- Controller Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationDocument6 pagesController Design For A Twin Rotor Helicopter Model Via Exact State Feedback LinearizationSaurabh SharmaNo ratings yet
- 35 Muhammad Tayyab (1)Document30 pages35 Muhammad Tayyab (1)Muhammad TayyabNo ratings yet
- The Influence of Inertia Weight On The Particle SWDocument7 pagesThe Influence of Inertia Weight On The Particle SWDedy Junaidy Raya AluminiumNo ratings yet
- Lab Report Sample Write-UpDocument4 pagesLab Report Sample Write-UpJonnalie TolentinoNo ratings yet
- International Journal of Innovative Analyses and Emerging TechnologyDocument12 pagesInternational Journal of Innovative Analyses and Emerging TechnologyOpen Access JournalNo ratings yet
- NEET - AIPMT - Full Length Practice Paper 03 - EzyexamsDocument42 pagesNEET - AIPMT - Full Length Practice Paper 03 - EzyexamsRakesh VishwakarmaNo ratings yet
- Modelling The Price of A Credit Default Swap: Agnieszka ZalewskaDocument29 pagesModelling The Price of A Credit Default Swap: Agnieszka ZalewskaJos MollenNo ratings yet
- Jagtap-2015-Simulation of Quarter Car Model Using MatlabDocument8 pagesJagtap-2015-Simulation of Quarter Car Model Using MatlabKyle N SamarooNo ratings yet
- Imc Based Pid Control of A Magnetic Levitation System: SciencedirectDocument8 pagesImc Based Pid Control of A Magnetic Levitation System: SciencedirectHoàng GiangNo ratings yet
- Detailed Investigation of Negative Sequence Current Compensation Technique For Stator Shorted Turn Fault Detection of Induction MotorDocument14 pagesDetailed Investigation of Negative Sequence Current Compensation Technique For Stator Shorted Turn Fault Detection of Induction MotorJorge Luis SotoNo ratings yet
- Furnace Design WT - 8 PDFDocument2 pagesFurnace Design WT - 8 PDFalphamale3No ratings yet
- Kinematics Motion and Free Falling ExperimentDocument5 pagesKinematics Motion and Free Falling ExperimentAbha NawafNo ratings yet
- Electrical Engg 2005Document20 pagesElectrical Engg 2005chandrakanthNo ratings yet
- Govt. Degree College For Boys, Jand Pre-Board Exams (Physics-I)Document4 pagesGovt. Degree College For Boys, Jand Pre-Board Exams (Physics-I)Ghulam FaridNo ratings yet
- Influence of Wind Turbine Wakes on UAV FlightDocument28 pagesInfluence of Wind Turbine Wakes on UAV FlightGianc87No ratings yet
- Brief Paper Output Feedback Controller Design of A Unicycle-Type Mobile Robot With Delayed MeasurementsDocument8 pagesBrief Paper Output Feedback Controller Design of A Unicycle-Type Mobile Robot With Delayed MeasurementsZeeshan ShamsiNo ratings yet
- Supernec: Utd Technical Reference ManualDocument23 pagesSupernec: Utd Technical Reference ManualyhbaeNo ratings yet
- Classical Mechanics SolutionsDocument9 pagesClassical Mechanics SolutionsJoel SolomonNo ratings yet
- Vdocuments - MX Kruger Criticalspeeds ShaftsDocument5 pagesVdocuments - MX Kruger Criticalspeeds ShaftsPRASHANT GOURNo ratings yet
- Cover PraktekDocument3 pagesCover PraktekdiahNo ratings yet
- Kyela Kamacha Angel Amira KamoiDocument1 pageKyela Kamacha Angel Amira KamoidiahNo ratings yet
- Lampiran SDDocument1 pageLampiran SDdiahNo ratings yet
- AD KSR Human FixDocument2 pagesAD KSR Human FixdiahNo ratings yet
- Diah SinthaDocument1 pageDiah SinthadiahNo ratings yet
- WahyuDocument2 pagesWahyudiahNo ratings yet
- Putu Diah Sintha NingtiasDocument9 pagesPutu Diah Sintha NingtiasdiahNo ratings yet
- Terapi Cairan Dalam Kegawatdaruratan: Nama KelompokDocument1 pageTerapi Cairan Dalam Kegawatdaruratan: Nama KelompokdiahNo ratings yet
- NCT DreamDocument2 pagesNCT DreamdiahNo ratings yet
- Learn English Tenses Quickly with Examples and RulesDocument2 pagesLearn English Tenses Quickly with Examples and RulesdiahNo ratings yet
- Cover STress Release Pasca BencanaDocument1 pageCover STress Release Pasca BencanadiahNo ratings yet
- Diah SinthaDocument1 pageDiah SinthadiahNo ratings yet
- Toast Master of Nursing Programme: N. AdiDocument7 pagesToast Master of Nursing Programme: N. AdidiahNo ratings yet
- Forensic Ballistics Module ExplainedDocument8 pagesForensic Ballistics Module ExplainedElla BanlasanNo ratings yet
- Analytical Modeling of The Guidance Systems ParametersDocument6 pagesAnalytical Modeling of The Guidance Systems ParametersthesijNo ratings yet
- Aircraft Stability and Control Quiz AnswersDocument3 pagesAircraft Stability and Control Quiz AnswersaeroacademicNo ratings yet
- ALX6 QRH 75 L SI Full Rev1.0Document208 pagesALX6 QRH 75 L SI Full Rev1.0sergiiNo ratings yet
- Principles of Flight: Learning ObjectivesDocument12 pagesPrinciples of Flight: Learning ObjectivesAshmi ShajiNo ratings yet
- Chapter 11 - Ground EffectDocument4 pagesChapter 11 - Ground EffectRezwan Ahmed KhanNo ratings yet
- Earth Photographs From Gemini VI Through XIIDocument338 pagesEarth Photographs From Gemini VI Through XIIBob Andrepont100% (2)
- Características 9 MM Sellier y BellotDocument9 pagesCaracterísticas 9 MM Sellier y Bellotoscar luis bernasconiNo ratings yet
- Beginners Guide To Motor and Prop SelectionDocument8 pagesBeginners Guide To Motor and Prop SelectionBlashko GjorgjievNo ratings yet
- Shuttle Performance Lessons Learned, Part 1Document647 pagesShuttle Performance Lessons Learned, Part 1Bob Andrepont100% (2)
- Soviet, US, and foreign ordnance projectilesDocument132 pagesSoviet, US, and foreign ordnance projectilesmwiweko2013100% (1)
- Acts 1Document4 pagesActs 1Shinya KogamiNo ratings yet
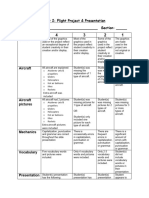
- Project Rubric Flight 1Document2 pagesProject Rubric Flight 1api-245933146No ratings yet
- Operator'S Manual: Please Read This Manual Carefully Before Using The Airsoft GunDocument20 pagesOperator'S Manual: Please Read This Manual Carefully Before Using The Airsoft GunkonserNo ratings yet
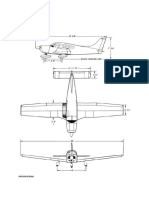
- Piper Warrir III PA28-161 SpecificationDocument24 pagesPiper Warrir III PA28-161 SpecificationCatesby YianNo ratings yet
- A. Answer The Following QuestionsDocument3 pagesA. Answer The Following QuestionsLalrinmawiiNo ratings yet
- CAO 20.16.1 - Aircraft loading rulesDocument4 pagesCAO 20.16.1 - Aircraft loading rulesEthan PoonNo ratings yet
- Weight and Balance / LoadsheetDocument3 pagesWeight and Balance / LoadsheetLaugh GeneratorNo ratings yet
- Sample Rocketry Questions ExplainedDocument6 pagesSample Rocketry Questions ExplainedAdetoro Mal PascalNo ratings yet
- FAR 23 Loads BrochureDocument2 pagesFAR 23 Loads BrochureDoor URNo ratings yet
- Synopsis MLMC 2021 Case PROCLIVIA Vs ASTERIA-1Document1 pageSynopsis MLMC 2021 Case PROCLIVIA Vs ASTERIA-1PRANOY GOSWAMINo ratings yet
- Electric Hybrid SizingDocument148 pagesElectric Hybrid SizingAbo AdhamNo ratings yet
- BGUQDocument5 pagesBGUQFenice FeniceNo ratings yet
- Wind TunnelDocument34 pagesWind TunnelSherlin NatashaNo ratings yet
- Technical Information Summary of Mercury-Redstone Mission No. 3, Capsule No. 7Document18 pagesTechnical Information Summary of Mercury-Redstone Mission No. 3, Capsule No. 7Bob AndrepontNo ratings yet
- Firebird Commander ManualDocument18 pagesFirebird Commander ManualVirgil ShewchukNo ratings yet
- Preliminary Wing Design Parameter Selection Rev 3 PDFDocument8 pagesPreliminary Wing Design Parameter Selection Rev 3 PDFvirgilioNo ratings yet
- FAA - AC 25-25A - Performance and Handling Characteristics in Icing ConditionsDocument72 pagesFAA - AC 25-25A - Performance and Handling Characteristics in Icing ConditionsAbraham TesfayNo ratings yet
- Air Exercises Guide 1Document44 pagesAir Exercises Guide 1emerutusNo ratings yet
- Juno - Pre - Phase A Case-Study PDFDocument34 pagesJuno - Pre - Phase A Case-Study PDFSriramNo ratings yet