You might also like
- Costos Portuarios Maritimos PeruDocument166 pagesCostos Portuarios Maritimos PeruPedroTartakFarah100% (1)
- Proyecto InnovadorDocument5 pagesProyecto InnovadorJhonathan Romero Paucar100% (1)
- PAQUETE 5 - (13 Ejercicios)Document12 pagesPAQUETE 5 - (13 Ejercicios)Luis Octavio Jojoa Losada50% (2)
- Masa y PesoDocument5 pagesMasa y Pesofaus li64% (14)
- Conservación de energía explica por qué la pelota regresa más lentaDocument5 pagesConservación de energía explica por qué la pelota regresa más lentaJill Martínez Velásquez75% (4)
- Hoja de Seguridad DESENGRASANTE FORTE 2016Document3 pagesHoja de Seguridad DESENGRASANTE FORTE 2016jefeqhse BI100% (1)
- Examen Ordinario Fisica 1 2020 2021Document14 pagesExamen Ordinario Fisica 1 2020 2021Jose Angel Romero MolinaNo ratings yet
- Momento angular y aceleración angular de un sistema rígidoDocument8 pagesMomento angular y aceleración angular de un sistema rígidoMarcos Gatsby ChambillaNo ratings yet
- E2 Dyn T1 2022 2Document6 pagesE2 Dyn T1 2022 2DANIEL AARON HUARHUA LOPEZNo ratings yet
- Documento de Jhandy QUENHUADocument16 pagesDocumento de Jhandy QUENHUAjhandy Quenhua MNo ratings yet
- 2012 1 Examen FFIeneroDocument5 pages2012 1 Examen FFIenerotxabiNo ratings yet
- Examenes Resueltos Del Curso2010 2011-1Document76 pagesExamenes Resueltos Del Curso2010 2011-1Nihad Zizaoui BachirNo ratings yet
- PoleasDocument27 pagesPoleasRubén Alarcón100% (1)
- Prueba 4 MNDocument5 pagesPrueba 4 MNAlexander TituañaNo ratings yet
- Física General III. Resortes en paralelo y serieDocument3 pagesFísica General III. Resortes en paralelo y serieFrancisca Gutierrez VelasquezNo ratings yet
- Guia - 7-Momentum Angular y TorqueDocument5 pagesGuia - 7-Momentum Angular y TorqueAquiles Nicolas Martinez100% (1)
- Diseño de Vigas CurvasDocument18 pagesDiseño de Vigas CurvasErnesto Diaz100% (1)
- Problemas PropuestosDocument4 pagesProblemas PropuestosDeysiNo ratings yet
- 03 Flexión Pura EsviadaDocument6 pages03 Flexión Pura EsviadaPedro Henrry Marza ColqueNo ratings yet
- ElectromagnetismoDocument23 pagesElectromagnetismoAndresNo ratings yet
- Pauta Examen 2014 1Document9 pagesPauta Examen 2014 1Carlos CastroNo ratings yet
- Física mecánica: Guía de ejercicios de dinámicaDocument4 pagesFísica mecánica: Guía de ejercicios de dinámicaIsaias Benjamin Trujillo CanalesNo ratings yet
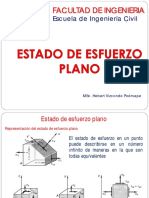
- Estado de Esfuerzo PlanoDocument28 pagesEstado de Esfuerzo PlanoHebert Vizconde PoemapeNo ratings yet
- Dinámica Del Movimiento Circular UniformeDocument9 pagesDinámica Del Movimiento Circular Uniformemarianly morales martinezNo ratings yet
- Parcial Resuelto (2015!06!18) - Resistencia de MaterialesDocument8 pagesParcial Resuelto (2015!06!18) - Resistencia de MaterialesKoji ChoqueticllaNo ratings yet
- Practica - 6-Torque MagneticoDocument13 pagesPractica - 6-Torque MagneticoDaniela ZuluagaNo ratings yet
- Primer Avance de FísicaDocument10 pagesPrimer Avance de FísicaJuan ArteagaNo ratings yet
- Talleres Fisica IIDocument8 pagesTalleres Fisica IIÁngela Aguirre LopezNo ratings yet
- Pendulo Fisico FisicaDocument8 pagesPendulo Fisico FisicaRolando MichelNo ratings yet
- Practica General No 2 Emi (Grupos D y H)Document8 pagesPractica General No 2 Emi (Grupos D y H)Andres Guisberth ApazaNo ratings yet
- (E.P) Producto Vectorial y Principio de Conservación Del Momento AngularDocument17 pages(E.P) Producto Vectorial y Principio de Conservación Del Momento AngularRicardo Castillo De LeónNo ratings yet
- PD1 Fis3 (20 1) Fza y Torq PDFDocument2 pagesPD1 Fis3 (20 1) Fza y Torq PDFKevin Tintaya VargasNo ratings yet
- EXAMEN DE FÍSICA DE LA UNIVERSIDAD MAYOR DE SAN ANDRESDocument5 pagesEXAMEN DE FÍSICA DE LA UNIVERSIDAD MAYOR DE SAN ANDRESEdgar LozaNo ratings yet
- Fuerzas y torques magnéticos sobre partículas cargadasDocument5 pagesFuerzas y torques magnéticos sobre partículas cargadasPeoto VallelinNo ratings yet
- Vibraciones Mecánicas UNIDocument4 pagesVibraciones Mecánicas UNICarlos HernándezNo ratings yet
- Fisica PDFDocument10 pagesFisica PDFIsel NufioNo ratings yet
- Trabjajos de Fisica Segundo CorteDocument10 pagesTrabjajos de Fisica Segundo CorteJohan CruzNo ratings yet
- Estatica SRDocument4 pagesEstatica SRJorge Perez GarciaNo ratings yet
- Practica No 7 Motor Monocilindrico Balanceo y Fuerzas de SacudimientoDocument8 pagesPractica No 7 Motor Monocilindrico Balanceo y Fuerzas de SacudimientoSaraNo ratings yet
- 2016 06 18 Madrid Problema1Document2 pages2016 06 18 Madrid Problema1Marta MarquesNo ratings yet
- Fundamentos Físicos de la Ingeniería: Ley de Biot y Savart y Ley de AmpèreDocument6 pagesFundamentos Físicos de la Ingeniería: Ley de Biot y Savart y Ley de AmpèreLuis Andres Díaz GallardoNo ratings yet
- Resumen 9-11Document50 pagesResumen 9-11Braython Gutierrez GrandaNo ratings yet
- Practica 4Document3 pagesPractica 4Jere Olivieri100% (1)
- Dinamica Circular EjerciciosDocument10 pagesDinamica Circular EjerciciosValentina Muñoz de la Sotta0% (1)
- Problemas Resueltos Campo Magnetico PDFDocument11 pagesProblemas Resueltos Campo Magnetico PDFScream CJNo ratings yet
- Actividad 14 - Círculo de MohrDocument8 pagesActividad 14 - Círculo de MohrDiego WalkerNo ratings yet
- Movimiento de esferas y barras sobre planos inclinadosDocument5 pagesMovimiento de esferas y barras sobre planos inclinadosJosé Israel SánchezNo ratings yet
- Ayudantía 1Document3 pagesAyudantía 1RodrigoEduardoVillalobosBarrazaNo ratings yet
- Sol Sep ProblemasDocument6 pagesSol Sep ProblemasEdson PomaNo ratings yet
- Oscilador armónico: Relación período-masaDocument10 pagesOscilador armónico: Relación período-masaRodolfo LRNo ratings yet
- Fundamentos Fisicos de La Electronic A EjerciciosDocument4 pagesFundamentos Fisicos de La Electronic A EjerciciosjeissonNo ratings yet
- Boletin Problemas 6Document11 pagesBoletin Problemas 6Angelica LeonNo ratings yet
- PBS Comunes RM Modulo 2Document7 pagesPBS Comunes RM Modulo 2AlexNo ratings yet
- Examenes Mecanica Aplicada II PDFDocument56 pagesExamenes Mecanica Aplicada II PDFPaolo German TourNo ratings yet
- Parcial Fisica I 2016-0Document6 pagesParcial Fisica I 2016-0Luzmii Quispe TorresNo ratings yet
- Examen Parcial 2 23369 PDFDocument4 pagesExamen Parcial 2 23369 PDFSebastian FajardoNo ratings yet
- Pr04 - Dinámica IDocument3 pagesPr04 - Dinámica IPablo GarciaNo ratings yet
- Movimiento de Electrones en Un Campo Magnetico MBSS PDFDocument22 pagesMovimiento de Electrones en Un Campo Magnetico MBSS PDFMicaela Beatriz Saavedra SuxoNo ratings yet
- Sistemas de Particulas PDFDocument14 pagesSistemas de Particulas PDFTere RomeroNo ratings yet
- 14 F2 Fisica GeneralDocument14 pages14 F2 Fisica GeneralGademaraNo ratings yet
- Solucionario de dinámica con velocidad y aceleraciónDocument7 pagesSolucionario de dinámica con velocidad y aceleraciónJhonathan Romero PaucarNo ratings yet
- Solucionario VibracDocument86 pagesSolucionario VibracCarlos Gargate ChavezNo ratings yet
- Tercera práctica de dinámicaDocument4 pagesTercera práctica de dinámicaJhonathan Romero PaucarNo ratings yet
- Examen SustitutorioDocument7 pagesExamen SustitutorioJhonathan Romero PaucarNo ratings yet
- Ejercicios CasaDocument12 pagesEjercicios CasamusicologomenesNo ratings yet
- Lectura AnalisisDocument21 pagesLectura AnalisisJhonathan Romero PaucarNo ratings yet
- Todo Nuestro Conocimiento Arranca Del SentidoDocument1 pageTodo Nuestro Conocimiento Arranca Del SentidoJhonathan Romero PaucarNo ratings yet
- Agrot. Agric.Document7 pagesAgrot. Agric.Jhonathan Romero PaucarNo ratings yet
- Informe ChinecasDocument24 pagesInforme ChinecasJhonathan Romero PaucarNo ratings yet
- Solucionario CuerpoDocument111 pagesSolucionario CuerpoJhonathan Romero PaucarNo ratings yet
- Agrot. AgricDocument5 pagesAgrot. AgricJhonathan Romero PaucarNo ratings yet
- Agrot. Agric.Document7 pagesAgrot. Agric.Jhonathan Romero PaucarNo ratings yet
- Aporte Unitario de MaterialesDocument36 pagesAporte Unitario de MaterialesJhonathan Romero PaucarNo ratings yet
- Apunte PavimentosDocument21 pagesApunte PavimentossrluismanNo ratings yet
- Cálculo valor hora hombre obreros afiliadosDocument20 pagesCálculo valor hora hombre obreros afiliadosNilda Abelida Zevallos RojasNo ratings yet
- Costo Hora HombreDocument2 pagesCosto Hora HombreJhonathan Romero PaucarNo ratings yet
- Apunte PavimentosDocument24 pagesApunte PavimentosJhonathan Romero PaucarNo ratings yet
- Diaz LoborablesDocument1 pageDiaz LoborablesJhonathan Romero PaucarNo ratings yet
- Hoja Excel para El Cálculo Del Valor de Las Horas Hombre (HH) 2018-2019 Jorge Blanco - CivilGeeks ©Document7 pagesHoja Excel para El Cálculo Del Valor de Las Horas Hombre (HH) 2018-2019 Jorge Blanco - CivilGeeks ©kernel7No ratings yet
- Tratamiento de Agua PotableDocument26 pagesTratamiento de Agua PotableJhonathan Romero PaucarNo ratings yet
- Aeropuertos y PuertosDocument3 pagesAeropuertos y PuertosJhonathan Romero PaucarNo ratings yet
- 3975 15157 1 PBDocument12 pages3975 15157 1 PBelvis condorNo ratings yet
- Excel Puertos y AeropuertosDocument8 pagesExcel Puertos y AeropuertosJhonathan Romero PaucarNo ratings yet
- Diaz LoborablesDocument1 pageDiaz LoborablesJhonathan Romero PaucarNo ratings yet
- Horario 2018-1Document3 pagesHorario 2018-1Jhonathan Romero PaucarNo ratings yet
- Plan de Tesis TerminadoDocument31 pagesPlan de Tesis TerminadoJhonathan Romero PaucarNo ratings yet
- Escoria EfectoDocument18 pagesEscoria EfectoJhonathan Romero PaucarNo ratings yet
- Manual Z50Document21 pagesManual Z50Sabri DuceNo ratings yet
- POROSIDADDocument7 pagesPOROSIDADbenjaminNo ratings yet
- Partes Del ChillerDocument6 pagesPartes Del ChillerPablo Joaquin100% (1)
- Solucions MineralizantesDocument6 pagesSolucions MineralizantesCristian Ezequiel HerediaNo ratings yet
- Lab Circuitos CuboDocument10 pagesLab Circuitos CuboSebastian Stayle Moreno SolanoNo ratings yet
- Diseño de Una LT - ArgentinaDocument153 pagesDiseño de Una LT - ArgentinaAlexander Arroyo JimenezNo ratings yet
- Biofarmacia y Farmacocinetica Proceso de ExcrecionDocument17 pagesBiofarmacia y Farmacocinetica Proceso de ExcrecionLUISA BERTHA ADUVIRI CORDOVANo ratings yet
- Taller 5 PDTDocument20 pagesTaller 5 PDTDavi ChileNo ratings yet
- AGA 04 Plant InecuacionesDocument3 pagesAGA 04 Plant InecuacionesviterickNo ratings yet
- Contexto Operacional BombaDocument16 pagesContexto Operacional BombaItalo Hernán IhpcNo ratings yet
- MétodoLSidentificaDocument4 pagesMétodoLSidentificaAlexandre Baeza MorenoNo ratings yet
- Mec 3330 - Sem 2-2019-Res AuxDocument4 pagesMec 3330 - Sem 2-2019-Res AuxRonald V. Nina VelizNo ratings yet
- Bianca Saavedra Olivares Tarea 5 Resistencia de Los MaterialesDocument8 pagesBianca Saavedra Olivares Tarea 5 Resistencia de Los Materialesjosefa saavedra olivares0% (1)
- Parcial #1 - PronosticosDocument5 pagesParcial #1 - PronosticosMARTIN EDUARDO ROJAS GUERRERONo ratings yet
- Borrador Primera Practica Analisis GraficoDocument8 pagesBorrador Primera Practica Analisis GraficoJUDITH APARICIONo ratings yet
- Placas TectonicasDocument9 pagesPlacas TectonicasYajaira IriarteNo ratings yet
- Teun A Van Dijk - Las Estructuras y Funciones Del Discurso-Conf 5Document28 pagesTeun A Van Dijk - Las Estructuras y Funciones Del Discurso-Conf 5Astrid PadillaNo ratings yet
- EXAMEN OLIMPIADA MATEMÁTICA 2do Año - SecundariaDocument2 pagesEXAMEN OLIMPIADA MATEMÁTICA 2do Año - SecundariaEdinsson R. Javier Villanueva100% (5)
- Potencial Eléctrico y Superficies EquipotencialesDocument5 pagesPotencial Eléctrico y Superficies EquipotencialesAndres Tuiran MartinezNo ratings yet
- 3HAC064993 PS IRB 1100-EsDocument66 pages3HAC064993 PS IRB 1100-EsOliver Gálvez ZavaletaNo ratings yet
- Movimiento en Un Campo EléctricoDocument21 pagesMovimiento en Un Campo EléctricoJared CruzNo ratings yet
- Vizimax Eliminar Los Transitorios Durante La Desenergización Del Reactor de Potencia V1.1Document5 pagesVizimax Eliminar Los Transitorios Durante La Desenergización Del Reactor de Potencia V1.1Carlos AvalosNo ratings yet
- Practica 4 Purificación Compuestos OrganicosDocument12 pagesPractica 4 Purificación Compuestos OrganicosMaicol JoldanNo ratings yet
- Presentación DE SQLDocument9 pagesPresentación DE SQLJuan Antonio RiveraNo ratings yet
- Teclado: tipos y clasificaciónDocument39 pagesTeclado: tipos y clasificaciónelkonzeNo ratings yet
- Seminario - H. Matemática (Erick)Document11 pagesSeminario - H. Matemática (Erick)Anghi YarangaNo ratings yet
- Mapa ConceptualDocument1 pageMapa ConceptualMauw J. M.No ratings yet