You might also like
- جزوه درس رادارDocument121 pagesجزوه درس رادارbahram bahramiNo ratings yet
- Upkar Radar EngineeringDocument9 pagesUpkar Radar Engineeringjeravi84No ratings yet
- MmwaveSensing FMCW Offlineviewing 0Document70 pagesMmwaveSensing FMCW Offlineviewing 0ppengNo ratings yet
- Radar Spectrum Engineering and Management IssuesDocument18 pagesRadar Spectrum Engineering and Management IssuesSry SantosNo ratings yet
- Book Problem Solutions Separate PagesDocument121 pagesBook Problem Solutions Separate PagesrathanNo ratings yet
- Radar Cheat SheetDocument12 pagesRadar Cheat SheetEng-Sa'di Y. Tamimi100% (1)
- Group Report Arduino Radar ShieldDocument12 pagesGroup Report Arduino Radar ShieldMustafa PehlivanNo ratings yet
- Communication Systems With SolutionsDocument109 pagesCommunication Systems With SolutionsChindam Hari Prasad50% (2)
- WC-Lecture-1, 2, 3Document72 pagesWC-Lecture-1, 2, 3Shibli ITNo ratings yet
- Ico PresentationDocument25 pagesIco PresentationbobfultzNo ratings yet
- Solutions To Chapter 2 Problems: (T U) (U T) (T U) (T U 0)Document17 pagesSolutions To Chapter 2 Problems: (T U) (U T) (T U) (T U 0)Sundar Raman P me17b070No ratings yet
- Design of FMCW Radars For Active Safety Applications PDFDocument5 pagesDesign of FMCW Radars For Active Safety Applications PDFAnonymous LoJy6ERXdNo ratings yet
- 9-7 Geometrical Vs Physical OpticsDocument17 pages9-7 Geometrical Vs Physical OpticsnidharshanNo ratings yet
- 2009 P. NortonDocument163 pages2009 P. NortonpamunozbNo ratings yet
- Jemh 107Document18 pagesJemh 107myNo ratings yet
- Real Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitDocument10 pagesReal Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitAI Coordinator - CSC JournalsNo ratings yet
- Satellite 101: Satellite Technology and Services: Sia Member CompaniesDocument32 pagesSatellite 101: Satellite Technology and Services: Sia Member Companiesrahmat aulia ikhsanNo ratings yet
- Linear Technology-Understanding IP2 and IP3 Issues in Direct Conversion Receivers For WCDMA Wide Area BasestationsDocument5 pagesLinear Technology-Understanding IP2 and IP3 Issues in Direct Conversion Receivers For WCDMA Wide Area BasestationsMichael GrahamNo ratings yet
- Weatherwax Theodoridis SolutionsDocument212 pagesWeatherwax Theodoridis SolutionsRakeshNo ratings yet
- Ec6015 Radar and Navigational Aids - Syllabus-A5Document2 pagesEc6015 Radar and Navigational Aids - Syllabus-A5anand_duraiswamyNo ratings yet
- Unit 1Document46 pagesUnit 1Mahendra ChennareddyNo ratings yet
- High Range-Resolution TechniquesDocument54 pagesHigh Range-Resolution TechniquesZamanundaIEEENo ratings yet
- ISRO-DEVAS S-BAND DEAL CONTROVERSYDocument14 pagesISRO-DEVAS S-BAND DEAL CONTROVERSYbhumikakhanna1985No ratings yet
- Radar Data and Relationships: Radar Bands Linear DB ScaleDocument2 pagesRadar Data and Relationships: Radar Bands Linear DB ScaleSusana RojasNo ratings yet
- اسئلة في الرادارDocument6 pagesاسئلة في الرادارعنوده احمدNo ratings yet
- The Design of Small Slot ArraysDocument6 pagesThe Design of Small Slot ArraysRoberto B. Di RennaNo ratings yet
- Antenna Theory: Analysis and DesignDocument60 pagesAntenna Theory: Analysis and DesignAhmed MohamedNo ratings yet
- Sample TheoremDocument3 pagesSample TheoremblueNo ratings yet
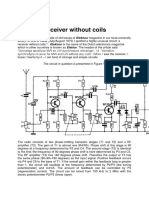
- AM Receiver Without CoilsDocument5 pagesAM Receiver Without CoilsBóza GyörgyNo ratings yet
- 6-Leg Spider Robot Kit GuidebookDocument83 pages6-Leg Spider Robot Kit GuidebookMeyninNo ratings yet
- Radar & Navigation QuestionsDocument2 pagesRadar & Navigation QuestionsFaizan KaziNo ratings yet
- Radar Basics - The Resolution CellDocument1 pageRadar Basics - The Resolution CellAkanksha GoelNo ratings yet
- AIEEE-2010 Solution (Hindi)Document37 pagesAIEEE-2010 Solution (Hindi)Resonance Kota100% (3)
- Solutions ... Es2Document101 pagesSolutions ... Es2Rajat AgarwalNo ratings yet
- Construir RobotDocument54 pagesConstruir RobotCarlos Ruiz LopezNo ratings yet
- Radar Signal Detection Using TMS320C50Document82 pagesRadar Signal Detection Using TMS320C50mgitecetechNo ratings yet
- 03-Amplifiers (Mode de Compatibilité)Document51 pages03-Amplifiers (Mode de Compatibilité)benfatahNo ratings yet
- Millimeter-Wavelength RadarsDocument17 pagesMillimeter-Wavelength RadarsbingwazzupNo ratings yet
- Range Resolution Improvement of FMCW RadarsDocument104 pagesRange Resolution Improvement of FMCW RadarsLe Duy Trung0% (1)
- 50 555circuits PDFDocument152 pages50 555circuits PDFleonelartesano2No ratings yet
- Lab TutorialDocument10 pagesLab TutorialMD JamalNo ratings yet
- Slot Antenna: A Radiator Made By Cutting A SlotDocument9 pagesSlot Antenna: A Radiator Made By Cutting A SlotMarcos Marcelon Alcantara Abueva IIINo ratings yet
- Multi Radar Tracker MRTDocument4 pagesMulti Radar Tracker MRTZayd Iskandar Dzolkarnain Al-HadramiNo ratings yet
- Waveform Analysis Using The Ambiguity Function - MATLAB & Simulink ExampleDocument16 pagesWaveform Analysis Using The Ambiguity Function - MATLAB & Simulink Exampleashaw002No ratings yet
- Data Directed Estimation Techniques For Single-Tone HF ModemsDocument10 pagesData Directed Estimation Techniques For Single-Tone HF Modemsradga1977No ratings yet
- Design and Development of A Robotic Drone A Drover.Document14 pagesDesign and Development of A Robotic Drone A Drover.IJRASETPublicationsNo ratings yet
- Scilab Textbook Companion For Antenna and Wave PropagationDocument176 pagesScilab Textbook Companion For Antenna and Wave PropagationTaherMontadarNo ratings yet
- Development of Dielectric Resonator AntennaDocument122 pagesDevelopment of Dielectric Resonator AntennasunilentcNo ratings yet
- Radar Systems Exam 2010Document23 pagesRadar Systems Exam 2010YanKezaNo ratings yet
- RADAR Probems (Eng)Document51 pagesRADAR Probems (Eng)abd syNo ratings yet
- Coplanar Waveguide - WikipediaDocument2 pagesCoplanar Waveguide - Wikipediaalvipin001No ratings yet
- Mealy SolutionsDocument265 pagesMealy SolutionsDasibNo ratings yet
- FMCW Radar Is A Special Type of Radar Sensor Which Radiates: Frequency-Modulated Continuous-Wave RadarDocument8 pagesFMCW Radar Is A Special Type of Radar Sensor Which Radiates: Frequency-Modulated Continuous-Wave RadarSummer KoNo ratings yet
- FM-CW Radar Range and Doppler MeasurementDocument21 pagesFM-CW Radar Range and Doppler MeasurementTammaneni NavyaNo ratings yet
- Continuous Wave and Frequency Modulated Radar: 3.1 The Doppler EffectDocument14 pagesContinuous Wave and Frequency Modulated Radar: 3.1 The Doppler Effect2121x3ssssssssssNo ratings yet
- Unit-II FMCW Radar UpdatedDocument11 pagesUnit-II FMCW Radar UpdatedChennam VaishnaviNo ratings yet
- C-Band 5.6GHz FMCW RadarDocument20 pagesC-Band 5.6GHz FMCW RadarNameNo ratings yet
- Radio NavigationDocument176 pagesRadio NavigationOleacov SergiuNo ratings yet
- LIBRO ShercunoffDocument670 pagesLIBRO ShercunoffMatias AyllonNo ratings yet
- Intermodulation Phase Noise & Dynamic Range (Plessey AN156-2)Document9 pagesIntermodulation Phase Noise & Dynamic Range (Plessey AN156-2)XollloXNo ratings yet
- C-Band 5.6GHz FMCW RadarDocument20 pagesC-Band 5.6GHz FMCW RadarNameNo ratings yet
- Sources of Intermodulation in Diode-Ring Mixers - H.P WalkerDocument9 pagesSources of Intermodulation in Diode-Ring Mixers - H.P WalkerName100% (1)
- High Frequency VCO Design and SchematicsDocument16 pagesHigh Frequency VCO Design and Schematicsbardaris100% (1)
- Discussion On Noise Figures of Radio Receivers - North, Friis PDFDocument3 pagesDiscussion On Noise Figures of Radio Receivers - North, Friis PDFName100% (1)
- Phased Array AntennasDocument49 pagesPhased Array AntennasNameNo ratings yet
- Micro Strip Antennas OverviewDocument118 pagesMicro Strip Antennas OverviewDenny SaputraNo ratings yet
- Designing FET Balanced Mixers For High Dynamic Range - Oxner - SiliconixDocument16 pagesDesigning FET Balanced Mixers For High Dynamic Range - Oxner - SiliconixName100% (1)
- Radio Handbook 16 1962Document811 pagesRadio Handbook 16 1962Name100% (1)
- Oscillator AM-To-FM Noise Conversion Due To The Dynamic Frequency-Drive Sensitivity of The Crystal Resonator - DriscollDocument5 pagesOscillator AM-To-FM Noise Conversion Due To The Dynamic Frequency-Drive Sensitivity of The Crystal Resonator - DriscollName100% (1)
- The Absolute Sensitivity of Radio Receivers - North - RCA-Review-1942-JanDocument136 pagesThe Absolute Sensitivity of Radio Receivers - North - RCA-Review-1942-JanNameNo ratings yet
- Phase ShiftersDocument14 pagesPhase Shiftersgurnamsaluja2007No ratings yet
- VHF-UHF DX BookDocument446 pagesVHF-UHF DX BookName100% (6)
- LIBRO ShercunoffDocument670 pagesLIBRO ShercunoffMatias AyllonNo ratings yet
- RF Power AmplifiersDocument20 pagesRF Power AmplifiersMichael LurchNo ratings yet
- Small Antennas For High FrequenciesDocument29 pagesSmall Antennas For High FrequenciesNameNo ratings yet
- RF System FormulasDocument8 pagesRF System FormulasName100% (1)
- Push Push VFODocument4 pagesPush Push VFOName100% (2)
- RF SwitchesDocument16 pagesRF SwitchesName100% (3)
- Phase Noise in OscillatorsDocument20 pagesPhase Noise in OscillatorsName100% (1)
- Microstrip, Stripline, and CPW DesignDocument40 pagesMicrostrip, Stripline, and CPW DesignNameNo ratings yet
- Understanding Noise FigureDocument22 pagesUnderstanding Noise FigureNameNo ratings yet
- Frequency MultipliersDocument19 pagesFrequency MultipliersKen StewartNo ratings yet
- Oscillator Phase Noise - NiknejadDocument61 pagesOscillator Phase Noise - NiknejadName100% (2)
- RF-Microwave PCB Design and LayoutDocument33 pagesRF-Microwave PCB Design and LayoutName100% (8)
- Low Noise Oscillator Design and Performance - M.M.DriscollDocument138 pagesLow Noise Oscillator Design and Performance - M.M.DriscollName100% (4)
- Noise Figures of Radio Receivers - Harald.T. Friis - 1944Document4 pagesNoise Figures of Radio Receivers - Harald.T. Friis - 1944Name100% (1)
- RF MixersDocument29 pagesRF MixersName100% (10)
- Nav1 Aplan2Document4 pagesNav1 Aplan2Jemar lucidoNo ratings yet
- Date 18 March 2021 Name: Ayu Andira Class: 1A/03Document9 pagesDate 18 March 2021 Name: Ayu Andira Class: 1A/03ayu afNo ratings yet
- Aplan DTR AprilDocument2 pagesAplan DTR AprilRodney Rubi AplanNo ratings yet
- Efficient Meeting Technology: CCS 900 Ultro Discussion SystemDocument6 pagesEfficient Meeting Technology: CCS 900 Ultro Discussion SystemPrasad RaoNo ratings yet
- SM36 Aa34Document40 pagesSM36 Aa34jackcastelNo ratings yet
- Pdo Guide To Engineering Standards and ProceduresDocument1 pagePdo Guide To Engineering Standards and ProceduresNavanitheeshwaran Sivasubramaniyam0% (1)
- Single Beam Echo SounderDocument9 pagesSingle Beam Echo SounderArizal HaffandiNo ratings yet
- Am ModulationDocument38 pagesAm ModulationaksdafNo ratings yet
- Ventmed BiPaP UsermanualDocument41 pagesVentmed BiPaP Usermanualkeyvan cryptoNo ratings yet
- Philips Semiconductors Baseband Delay Line Product Specification TDA4661Document6 pagesPhilips Semiconductors Baseband Delay Line Product Specification TDA4661Thoni Tsaqif BRNo ratings yet
- Notes Antennas and Wave PropagationDocument22 pagesNotes Antennas and Wave PropagationTarun JoshiNo ratings yet
- Wireless Mobile Communication MCQDocument37 pagesWireless Mobile Communication MCQAmbuj Singh80% (5)
- Jeppview For Windows: List of Pages in This Trip KitDocument26 pagesJeppview For Windows: List of Pages in This Trip KitMichael ParkanskiNo ratings yet
- CS Chapter3 2020Document135 pagesCS Chapter3 2020Lớn Bài tậpNo ratings yet
- V-Band GaAs Metamorphic Low-Noise Amplifier Design Technique For Sharp Gain Roll-Off at Lower FrequenciesDocument4 pagesV-Band GaAs Metamorphic Low-Noise Amplifier Design Technique For Sharp Gain Roll-Off at Lower Frequencieskarthik srivatsa mbNo ratings yet
- Carrier Aggregation in MINI-LINK 6000: Mikael Öhberg Jonas FlodinDocument20 pagesCarrier Aggregation in MINI-LINK 6000: Mikael Öhberg Jonas Flodinمهدي مهدي100% (1)
- LM3916 LED VU Meter Circuit GuideDocument27 pagesLM3916 LED VU Meter Circuit GuidekrishnayahooNo ratings yet
- Zain Kuwait's LTE Network: The Antenna: Pinnacle ofDocument4 pagesZain Kuwait's LTE Network: The Antenna: Pinnacle ofahmedsaber2007No ratings yet
- Massive MIMO EIRP and EMF For VFUKDocument15 pagesMassive MIMO EIRP and EMF For VFUKUmer AftabNo ratings yet
- Cmp200dr Service ManualDocument337 pagesCmp200dr Service ManualSwami Meera100% (2)
- Qmho FormatDocument3 pagesQmho FormatSindhuKumarNo ratings yet
- HRM-Dual: Pairing The Heart Rate Monitor With Your Bluetooth DeviceDocument2 pagesHRM-Dual: Pairing The Heart Rate Monitor With Your Bluetooth DeviceLeonard PeñaNo ratings yet
- Jeppview For Windows: General Information Communication Information General InformationDocument14 pagesJeppview For Windows: General Information Communication Information General Informationİ. Çağlar YILDIRIMNo ratings yet
- KDC-X895 KDC-BT848U KDC-X595 KDC-448U: Quick Start Guide Guide de Démarrage Rapide Guía de Inicio RápidoDocument44 pagesKDC-X895 KDC-BT848U KDC-X595 KDC-448U: Quick Start Guide Guide de Démarrage Rapide Guía de Inicio RápidoJhonny RojasNo ratings yet
- Installation and Commissioning FL WLAN 101x/201x Product FamilyDocument46 pagesInstallation and Commissioning FL WLAN 101x/201x Product FamilyBambang AmingNo ratings yet
- Iphone 5se SchematicpdfDocument28 pagesIphone 5se SchematicpdfBruno Vieira BarbozaNo ratings yet
- British Airways 'Worst Airline For Baggage Problems' - BBC NewsDocument10 pagesBritish Airways 'Worst Airline For Baggage Problems' - BBC NewsSayed MazakatNo ratings yet
- G.R. No. 162272Document12 pagesG.R. No. 162272Joshua Buenaobra CapispisanNo ratings yet
- Simple BFO Metal DetectorDocument6 pagesSimple BFO Metal DetectorKireNo ratings yet
- Xtend - PKG RF ModemsDocument4 pagesXtend - PKG RF ModemsJosé CarlosNo ratings yet