You might also like
- Short-Circuit Calculations: Basic Principles and ModelsDocument28 pagesShort-Circuit Calculations: Basic Principles and ModelsJuan CollantesNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation DC Motor Speed Control System by Using PID ControllerDocument6 pagesSimulation DC Motor Speed Control System by Using PID ControllerEditor IJTSRDNo ratings yet
- Lecture 10 PiezoresistiveDocument13 pagesLecture 10 Piezoresistives_hassan_167419100% (1)
- Astm D 4444-92Document6 pagesAstm D 4444-92WuzekNo ratings yet
- Almig Air Control B Service ManualDocument41 pagesAlmig Air Control B Service ManualJunaid Ahmed50% (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Breakdown Characteristics of Air GapsDocument9 pagesBreakdown Characteristics of Air GapsChamath KirindeNo ratings yet
- A Study of Synchronous Motor Drive Using SFCDocument4 pagesA Study of Synchronous Motor Drive Using SFCBrian GuevaraNo ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Jacob 2016Document7 pagesJacob 2016TrơNhưNitơNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Field-Oriented Control Decoupling Network for PWM InvertersDocument5 pagesField-Oriented Control Decoupling Network for PWM InvertersJoseph NoumbissieNo ratings yet
- Modeling, Simulation and Implementation of Brushed DC Motor Speed Control Using Optical Incremental Encoder FeedbackDocument10 pagesModeling, Simulation and Implementation of Brushed DC Motor Speed Control Using Optical Incremental Encoder Feedbackindahrahmawati8No ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Maintaining DC Voltage with Feedback ControlDocument8 pagesMaintaining DC Voltage with Feedback ControlFatih BurakNo ratings yet
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarNo ratings yet
- Industrial Electronics CbcgsDocument28 pagesIndustrial Electronics Cbcgshadesg895No ratings yet
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- A New Topology For Unipolar Brushless DC Motor DriveDocument55 pagesA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06No ratings yet
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocument5 pagesTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- Vsi Fed 3ph ImDocument13 pagesVsi Fed 3ph ImWisemin LinsNo ratings yet
- An Improved Approach of Control For A Battery Charger Based Forward Converter and SEPICDocument6 pagesAn Improved Approach of Control For A Battery Charger Based Forward Converter and SEPICPablo PulacheNo ratings yet
- Control BLDC Motor Speed Using PID ControllerDocument5 pagesControl BLDC Motor Speed Using PID ControllerAbhay JangirNo ratings yet
- 1.1 Voltage Source Converters (VSC) : TH THDocument12 pages1.1 Voltage Source Converters (VSC) : TH THSherif M. DabourNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- June 03 El 5Document6 pagesJune 03 El 5Mithun KumarNo ratings yet
- PFC Z-source CSC converter for BLDCM driveDocument7 pagesPFC Z-source CSC converter for BLDCM driveTechnos_IncNo ratings yet
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocument6 pagesReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNo ratings yet
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocument8 pagesA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNo ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using PsimhusseinNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- Mahdipour 2015Document14 pagesMahdipour 2015Yustinus PadmundanaNo ratings yet
- MPC Rizado TorqueDocument6 pagesMPC Rizado TorquesebastianG1995No ratings yet
- Performance Analysis of Fuzzy Logic Cont PDFDocument6 pagesPerformance Analysis of Fuzzy Logic Cont PDFMuruganandam MasilamaniNo ratings yet
- A Hybrid Solution For Load-Commutated-Inverter-Fed Induction Motor DrivesDocument8 pagesA Hybrid Solution For Load-Commutated-Inverter-Fed Induction Motor DrivesishtiyqueNo ratings yet
- Control VectorialDocument6 pagesControl VectorialdanipedoNo ratings yet
- ProjectDocument30 pagesProjectmitesh goyal100% (1)
- IJETR2166Document8 pagesIJETR2166anil kasotNo ratings yet
- Four Switch Three Phase Inverter Control of BLDC MotorDocument6 pagesFour Switch Three Phase Inverter Control of BLDC MotorBhargav Cho ChweetNo ratings yet
- Simulation of Novel Technique For DC Drive For Crane ApplicationDocument5 pagesSimulation of Novel Technique For DC Drive For Crane ApplicationKypa Meenendra Nath Reddy100% (1)
- Microcontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwareDocument7 pagesMicrocontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwaremakroumNo ratings yet
- CIRED2011 0535 FinalDocument4 pagesCIRED2011 0535 FinalUsman RasheedNo ratings yet
- Assignment Elecrical DriveDocument7 pagesAssignment Elecrical DriveTaufik AdhaNo ratings yet
- 2014-Arwindra-Synthesis Modeling of 10 KW BLDC Controller Using PSIMDocument6 pages2014-Arwindra-Synthesis Modeling of 10 KW BLDC Controller Using PSIMKiki RamadhanNo ratings yet
- BLDC1Document5 pagesBLDC1elabam39No ratings yet
- Sensorless FOC on 8-bit MCUs delivers high-performance motor controlDocument3 pagesSensorless FOC on 8-bit MCUs delivers high-performance motor controlasASasASNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- EKF Applied To BLDCDocument9 pagesEKF Applied To BLDCUma SathyadevanNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- A Review On Single Phase To Three Phase Power Converters: Kaushal W. Kakad & Nitin R. BhasmeDocument10 pagesA Review On Single Phase To Three Phase Power Converters: Kaushal W. Kakad & Nitin R. BhasmeTJPRC PublicationsNo ratings yet
- A Neutral-Point Clamped Converter System For Direct-Drive Variable-Speed Wind Power UnitDocument12 pagesA Neutral-Point Clamped Converter System For Direct-Drive Variable-Speed Wind Power UnitNguyen Nga-VietNo ratings yet
- Thyristor Based Speed Control Techniques of DC Motor: A Comparative AnalysisDocument7 pagesThyristor Based Speed Control Techniques of DC Motor: A Comparative Analysismahendra ANo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- Active Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der SuDocument6 pagesActive Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der Su01689373477No ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- BLDC Motor DriverDocument6 pagesBLDC Motor DriverjpmacabascoNo ratings yet
- Evaluation of Two Different Method For Speed Control of DC MotorDocument4 pagesEvaluation of Two Different Method For Speed Control of DC MotorUmer EhsanNo ratings yet
- Automatic Alternator SynchronisationDocument24 pagesAutomatic Alternator SynchronisationHemant Patel50% (2)
- Design and Implementation Three-Arms Rectifier Inverter of A Single PhaseDocument6 pagesDesign and Implementation Three-Arms Rectifier Inverter of A Single Phasecelo81No ratings yet
- NA011 Manual 10 2009Document72 pagesNA011 Manual 10 2009Brian GuevaraNo ratings yet
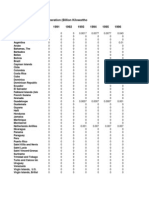
- Table: Wind Electricity Net Generation (Billion Kilowatthours)Document3 pagesTable: Wind Electricity Net Generation (Billion Kilowatthours)Brian GuevaraNo ratings yet
- Basic Design Report - Part 2 Rev 1 Oct 2007 PDFDocument49 pagesBasic Design Report - Part 2 Rev 1 Oct 2007 PDFBrian GuevaraNo ratings yet
- Abdallah Matoug Al-Dushaishi: Electrical EngineerDocument4 pagesAbdallah Matoug Al-Dushaishi: Electrical Engineerameer457No ratings yet
- Fig.1 Block Diagram of TransmitterDocument5 pagesFig.1 Block Diagram of TransmitterKranthi KumarNo ratings yet
- Installation Guide: HP Integrity rx4640 ServerDocument113 pagesInstallation Guide: HP Integrity rx4640 ServerbahmannewNo ratings yet
- Jason Spero: With Johanna WertherDocument41 pagesJason Spero: With Johanna WertherVasco MarquesNo ratings yet
- TQM implementation and policy deployment at ST MicroelectronicsDocument11 pagesTQM implementation and policy deployment at ST MicroelectronicsNiño Ninz100% (1)
- Xii Derivation List-2023-24 2Document3 pagesXii Derivation List-2023-24 2prachurjyapadhiNo ratings yet
- Evolution of ComputerDocument10 pagesEvolution of ComputerAbhishek DabarNo ratings yet
- Operating Manual: Epc-50/50E Air-Fuel Controllers Form EPC-50/50e OM 9-12Document46 pagesOperating Manual: Epc-50/50E Air-Fuel Controllers Form EPC-50/50e OM 9-12Esau Jose PabloNo ratings yet
- The Difference Between NMOSDocument5 pagesThe Difference Between NMOSRey TiburonNo ratings yet
- GW-US54Mini Manual v1.1 CHTDocument28 pagesGW-US54Mini Manual v1.1 CHT楊睦源No ratings yet
- Helix 2.0 Owners Manual - Rev D - English PDFDocument59 pagesHelix 2.0 Owners Manual - Rev D - English PDFAloysius JulindraNo ratings yet
- Sl400 and Sl500 DatasheetDocument4 pagesSl400 and Sl500 DatasheetPlanner MjhNo ratings yet
- Digital Testing of High-Voltage Circuit BreakersDocument5 pagesDigital Testing of High-Voltage Circuit Breakersvallala venkateshNo ratings yet
- Digital&Analolg SignalingDocument60 pagesDigital&Analolg SignalingErick VarelaNo ratings yet
- Circuit Note: Adrv-PackrfDocument15 pagesCircuit Note: Adrv-PackrfwesNo ratings yet
- 0625 s14 QP 32Document20 pages0625 s14 QP 32Hadi PrijonoNo ratings yet
- Lab 6 Firna FrilanisaDocument22 pagesLab 6 Firna FrilanisaFirna FrilanisaNo ratings yet
- Additional List of KWH Meter ManufactureDocument4 pagesAdditional List of KWH Meter ManufactureGENERAL CNTICNo ratings yet
- HP-AN346 - A Guideline For Designing External DC Bias CircuitsDocument10 pagesHP-AN346 - A Guideline For Designing External DC Bias Circuitssirjole7584No ratings yet
- Snack & Drink Vending MachinesDocument14 pagesSnack & Drink Vending MachinesAbel TeferaNo ratings yet
- WS-100 To WS-235: Arun SeriesDocument3 pagesWS-100 To WS-235: Arun Seriesajitp123No ratings yet
- Wave Optics Animation - PpsDocument20 pagesWave Optics Animation - Ppsaleena'No ratings yet
- MetroCount Data CollectionDocument30 pagesMetroCount Data CollectionPaco TrooperNo ratings yet
- Amendment 3 to AIS-156 focuses on REESS safetyDocument7 pagesAmendment 3 to AIS-156 focuses on REESS safetypranavNo ratings yet
- Ericsson Rbs 2216 PDFDocument2 pagesEricsson Rbs 2216 PDFMonique100% (1)
- TSP-408L-1 P/N 32441-002: ApplicationDocument2 pagesTSP-408L-1 P/N 32441-002: ApplicationSajjad ShamimNo ratings yet