International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue IX, Sep 2018- Available at www.ijraset.com
Identification of Indian Road Distress with Ruleset
using Image Processing
Suwarna Gothane1, Dr. M. V. Sarode2, Dr. V.M. Thakre3
1
Associate Professor, CSE Dept, CMR Technical Campus, Hyderabad, India, Research Scholar, Sant Gadge Baba Amravati
University, India.
2
Head of CSE Dept, Government Polytechnic, Yavatmal, India.
3
Professor, Sant Gadge Baba Amravati University, India.
Abstract: Cracks are a growing threat to road conditions and have drawn much attention to the construction of smart
transportation systems. Automatic road crack detection has been challenged because of the intense inhomogeneity along the
cracks, the topology complexity of cracks, the inference of noises with similar texture to the cracks, and so on. However, the
difficult nature of pavement images, the small size of defects lead to the fact that inspection in this area is done mostly manually.
Further cracks can lead to potholes and causes obstacles for smooth driving. In this paper, we defined ruleset based on extracted
parameter for road images for identification of cracks, patches and potholes.
Keywords: road distress, cracks, potholes, patches, Ruleset.
I. INTRODUCTION
Survey of roadway conditions is significant job to assure road safety. The purpose is to detect surface problem, initially raveling and
cracking, for planning effective road maintenance with sustainability .The most common type of surface distress is cracking. Cracks
on the road surface slow down the performance on road and hence demands for the road safety[1]. Much of the efforts have been
made by Governments for developing quality road network. Road maintenance systems vital step includes as major role crack
detection. Earlier manual road crack detection techniques was time-consuming, dangerous, labor-intensive and subjective [2]–
[5].Detecting a crack manually is a very intricate and time consuming process. As science and technology evolved more focus
reached towards automation to identify cracks with cleverness. Automated approach shown benefit in terms of time and cost
reduction for detecting the cracks with accuracy.
Various algorithms have been proposed and are used as an automated systems to detect cracks. Manual inspection gradually shifted
towards automatic source of data collection at high speed using cameras on vehicles [6]. Data processing and surface condition
monitoring and collecting history of the imaging devices in [7]. Charge-Coupled Device, attainment techniques provided better
results for occurrence of cracks by pixel intensities.
Emerging 3D imaging technology from past years found beneficial based on the elevation data. Giving priority to safe driving
suitable plan of maintenance and analysis of the road distress is required.
The major hurdle on road are potholes compromise result in vehicle damage. Timely repairing potholes is crucial in ensuring the
safety, quality of driving, and reducing the cost of vehicle maintenance. Pavement condition assessment is vital with emergent road
network maintenance work. To the larger extent data collection process becomes automated where as road disease identification
such as cracks, potholes, etc. is more often performed manually, which is labour-intensive and time-consuming. Obtainable
approaches move toward a high equipment and working out expensive. Pothole are one of the primary cause of accidents, hence
detection and classification is crucial. Potholes though seem inconsequential, may cause accidents resulting in loss of human life.
Road performance can be monitored by observing its structural and functional performance or predicting the serviceability of a road
from its initial service time to the desired evaluation time.
Generally, road condition can be evaluated on the basis of four aspects i.e. riding quality, surface distress, structural capacity and
skid resistance.
The rest of the work is furnished such as in Section – II consists of Related Work, in Section – III consists of Proposed Work,
Section – IV consists of implementation and obtained results, Section – V conclusion is discussed.
©IJRASET: All Rights are Reserved 35
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue IX, Sep 2018- Available at www.ijraset.com
II. RELATED WORK
Yong Shi et.al [8] developed automatic road crack detection using random structured forests technique called CrackForest, with
intensity inhomogeneity approach. Author generated a high performance crack detector, identified arbitrarily complex cracks and
characterize them effectively. Method found is faster and easier than parallel work. Nouha Ben Cheikh et.al.[9] developed
Automatic Crack Detection From Using Fuzzy Thresholding implemented in a Matlab prototype, trained and tested on 330 real
pavement images. The results show that this method can detect a crack in pavement images with reasonable accuracy. Rabih
Amhaz, [10] developed Automatic Crack Detection on Two-Dimensional Pavement Image based on Minimal Path Selection
algorithm. An approach used the photometric and geometric characteristics of pavement images. An intensive validation is
performed on both synthetic and real images (from five different acquisition systems), with comparisons to five existing methods.
The proposed algorithm provides very robust and precise results in a wide range of situations, in a fully unsupervised manner.
Amila Akagic et al. [11] worked on Pothole Detection with unsupervised Vision Based Method Using RGB Color Space Image
Segmentation. The method is tested on online image data set captured from different cameras and angles, with different irregular
shapes and number of potholes. Margaret Velse Thekkethala et al. [12] proposed pothole detection and volume estimation using
stereoscopic cameras. In the proposed method, an image is first resized and converted to grayscale. It is then histogram equalized.
This is followed by thresholding and basic edge detection using the Sobel filter. Morphological operations such as dilation and
eroding are performed and median filtering removes excess noise.
A logical addition of the results obtained till then, results in a relative pothole shape. A structuring element allows for the pothole to
be defined and opened and a skeleton of the pothole is formed.
A bifurcation process is applied so as to remove any branches. Subsequently, the result of this operation is used for multiplying
image matrices and the pothole is extracted.
This methodology has been implemented in a MATLAB prototype and tested on 24 pavement images. The stereoscopic camera
technique is used to improve accuracy and to determine the depth or volume of the pothole. The volume of the pothole may be used
to estimate the amount of asphalt material required to fill it. The results indicate that this method can detect potholes in asphalt
pavement images with reasonable accuracy.
Vigneshwar. K[13] worked on Detection and Counting of Pothole using Image Processing Techniques. From the results the K-
Means clustering based segmentation was preferred for its fastest computing time and edge detection based segmentation is
preferred for its specificity. Manisha Mandal et al. [14] worked on automated management of pothole related disasters using image
processing and geotagging. An automated system to efficiently manage the potholes in a ward by deploying geotagging and image
processing techniques that overcomes the drawbacks associated with the existing survey-oriented systems.
Image processing is used for identification of target pothole regions in the 2D images using edge detection and morphological image
processing operations.
A method is developed to accurately estimate the dimensions of the potholes from their images, analyze their area and depth,
estimate the quantity of filling material required and therefore enabling pothole attendance on a priority basis.
This will further enable the government official to have a fully automated system for effectively managing pothole related
disasters.
Ankita Khatri et al. [15] worked on Image Processing techniques for maintenance of roads by observing its structural and functional
performance or predicting the serviceability of a road from its initial service time to the desired evaluation time.
III. PROPOSED WORK
Proposed framework consider goal to perform most accurate detection of cracks, potholes and patches. Here capture device is used
to capture images of road surface. In order to reduce noise we have applied preprocessing step on input images. We have extracted
parameters from the images dataset which is available in [16].This work make use of results of earlier work of Suwarna et al.
Henceforth, after noise removal, parameter extraction, we have perform detection of the cracks, potholes and patch works. This
information can be further useful for maintenance of road distress.
We considered parameters long slope, perpendicular slope, number of objects, maximum distance between objects perpendicular
distance of midpoint, average perpendicular width and identified minimum and maximum range for the cracks, patches and
potholes.
©IJRASET: All Rights are Reserved 36
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue IX, Sep 2018- Available at www.ijraset.com
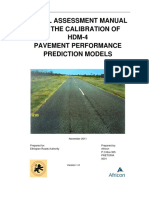
The proposed framework is shown in Fig.1
Fig.1: Proposed Technique for Road Distress Detection
IV. IMPLEMENTATION
We have implemented results in Matlab. Here we defined Ruleset to identify cracks, patches and potholes and identified
maximum and minimum range. And finally perform classification of defect into Ruleset 1 for cracks, Rule set 2 for patches,
Ruleset 3 for potholes.
Classification of defects and rule based classification engine is shown in [Table -1].
Parameters Min Range Max Range
longSlope 1.47 -0.63
perpendicularSlope -0.68 1.59
Rule Set - 1
Number of Objects 1 1
(Cracks)
Max distance between Objects 295.11 623.71
Perpendicular distance at midpoint 120.64 321.14
Average perpendicular width 92.97 222.99
Parameters Min Range Max Range
longSlope 0.88 0.14
perpendicularSlope -1.14 -7.06
Rule Set - 2
Number of Objects 1 1
(Patches)
Max distance between Objects 172.9 384.81
Perpendicular distance at midpoint 77.16 54.36
Average perpendicular width 49.83 61.93
Parameters Min Range Max Range
longSlope 0.55 0.5
perpendicularSlope -1.83 -2.02
Rule Set - 3
Number of Objects 1 1
(Potholes)
Max distance between Objects 756.75 1314.82
Perpendicular distance at midpoint 222.79 650.43
Average perpendicular width 187.72 522.15
Table 1.Defect Classification Rule Based Engine
©IJRASET: All Rights are Reserved 37
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue IX, Sep 2018- Available at www.ijraset.com
V. CONCLUSION
In this work we defined ruleset to identify cracks, patches and potholes and identified maximum and minimum range. We
considered parameters long slope, perpendicular slope, number of objects, maximum distance between objects perpendicular
distance of midpoint, average perpendicular width and identified minimum and maximum range for the cracks, patches and
potholes.
REFERENCES
[1] H. Oliveira and P. L. Correia, “Automatic road crack segmentation using entropy and image dynamic thresholding”, in Proc. 17th EUSIPCO, , pp. 622–626,
Aug. 24–28, 2009.
[2] H. Cheng, J.R. Chen, C. Glazier, and Y. Hu, “Novel approach to pavement cracking detection based on fuzzy set theory”, J. Comput. Civil Eng., vol. 13, no. 4,
pp. 270–280, Oct. 1999.
[3] H. Cheng et al., “Novel approach to pavement cracking detection based on neural network”, Transp. Res. Rec., J. Transp. Res. Board, vol. 1764, pp. 119–127,
2001.
[4] P. Subirats, J. Dumoulin, V. Legeay, D. Barba, “Automation of pavement surface crack detection using the continuous wavelet transform”, in Proc. IEEE Int.
Conf. Image Process., pp. 3037–3040, 2006.
[5] T. S. Nguyen, M. Avila, S. Begot,“Automatic detection and classification of defect on road pavement using anisotropy measure”, in Proc. Eur. Signal Process.
Conf., pp. 617–621, 2009.
[6] M. Ahmed and C. Haas, “The potential of low cost close range photogrammetry towards unified automatic pavement distress surveying”, presented at the
Transportation Research Board Meeting, Washington, DC, USA, 2009.
[7] M. Gavilán et al.,“Adaptive road crack detection system by pavement classification”, Sensors, vol. 11, pp. 9628–9657, 2011.
[8] Yong Shi, Limeng Cui, Zhiquan Qi, Fan Meng, and Zhensong Chen, “Automatic Road Crack Detection Using Random Structured Forests”, IEEE Transactions
On Intelligent Transportation Systems, pp. 3434-3445, Vol. 17, No. 12, December 2016.
[9] Nouha Ben Cheikh Ahmed1,Samer Lahouar, Chokri Souani, Kamel Besbes, “Automatic Crack Detection From Pavement Images Using Fuzzy
Thresholding”,ICCAD’17, Hammamet - Tunisia, January 19-21, 2017.pp.528-533,IEEE 2017.
[10] Rabih Amhaz, Sylvie Chambon, Jérôme Idier, Member, IEEE, and Vincent Baltazart, “Automatic Crack Detection on Two-Dimensional Pavement Images: An
Algorithm Basedon Minimal Path Selection”,IEEE Transactions On Intelligent Transportation Systems,pp.2718-2729, Vol. 17, No. 10, October 2016.
[11] Amila Akagic, Emir Buza, Samir Omanovic, “Pothole Detection: An Efficient Vision Based Method Using RGB Color Space Image
Segmentation”,MIPRO2017,Opatija, Croatia.pp.1104-1109, May 22- 26, 2017.
[12] Margaret Velse Thekkethala, Reshma S, Sebin Jacob Varughese, Vaishnavi Mohan, Geevarghese Titus, “Pothole Detection And Volume Estimation Using
Stereoscopic Cameras”, International Journal of Industrial Electronics and Electrical Engineering, ISSN: 2347-6982 Volume-4, Issue-5, May 2016.
[13] Vigneshwar. K, “Detection and Counting of Pothole using Image Processing Techniques”, 2016 IEEE International Conference on Computational Intelligence
and Computing Research IEEE, 2016.
[14] Manisha Mandal, Madhura Katageri, Mansi Gandhi, Navin Koregaonkar, Sharmila Sengupta, “Automated Management Of Pothole related Disasters Using
Image Processing And Geotagging”, International Journal of Computer Science & Information Technology (IJCSIT) Vol. 7, No 6, December 2015.
[15] Ankita Khatri,Umesh Sharma, “Image Processing techniques for maintenance of roads”, Int'l Journal of Research in Chemical, Metallurgical and Civil Engg.
(IJRCMCE) Vol. 3, Issue 2 (2016) ISSN 2349-1442 EISSN 2349-1450, 2016.
[16] Suwarna Gothane, M.V.Sarode, V.M.Thakre,“An Automatic Framework for Parameter Extraction from Road Images with Potholes”, 2018.
AUTHORS PROFILE
Suwarna Gothane is presently working as an Associate Professor in CMR Technical campus, Hyderabad, Telangana,
India. She is pursuing Ph.D. from Sant Gadge Baba Amravati University. She received her M.E (CSE) degree from P.R.M.I.T & R,
Amravati in the year 2012. She received B.E. (CSE) degree from H.V.P.M C.O.E & T, in the year 2006. Her areas of interests are
Data Mining, Image Processing, Machine learning etc.
Dr. Milindkumar Sarode currently working as HOD. Government Polytechnic, Yavatmal, India. He has completed his
Ph. D in Computer Science and Engg. His research area includes Digital Image processing and Algorithms, Distributed System and
Data Analysis.
©IJRASET: All Rights are Reserved 38
International Journal for Research in Applied Science & Engineering Technology (IJRASET)
ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 6.887
Volume 6 Issue IX, Sep 2018- Available at www.ijraset.com
Dr. Vilas M. Thakare currently working as Professor and Head in Computer Science, Faculty of Engineering &
Technology, Post Graduate Department of Computer Science, SGBAU. He has completed his Ph.D. in Computer Science. His
research interest includes Networking, Mobile Computing, Cyber Security, AI, Robotics.
©IJRASET: All Rights are Reserved 39
You might also like
- Design and Analysis of Components in Off-Road VehicleDocument23 pagesDesign and Analysis of Components in Off-Road VehicleIJRASETPublicationsNo ratings yet
- Design and Analysis of Fixed-Segment Carrier at Carbon Thrust BearingDocument10 pagesDesign and Analysis of Fixed-Segment Carrier at Carbon Thrust BearingIJRASETPublicationsNo ratings yet
- Advanced Wireless Multipurpose Mine Detection RobotDocument7 pagesAdvanced Wireless Multipurpose Mine Detection RobotIJRASETPublicationsNo ratings yet
- IoT-Based Smart Medicine DispenserDocument8 pagesIoT-Based Smart Medicine DispenserIJRASETPublications100% (1)
- 11 V May 2023Document34 pages11 V May 2023IJRASETPublicationsNo ratings yet
- Air Conditioning Heat Load Analysis of A CabinDocument9 pagesAir Conditioning Heat Load Analysis of A CabinIJRASETPublicationsNo ratings yet
- BIM Data Analysis and Visualization WorkflowDocument7 pagesBIM Data Analysis and Visualization WorkflowIJRASETPublicationsNo ratings yet
- TNP Portal Using Web Development and Machine LearningDocument9 pagesTNP Portal Using Web Development and Machine LearningIJRASETPublicationsNo ratings yet
- Controlled Hand Gestures Using Python and OpenCVDocument7 pagesControlled Hand Gestures Using Python and OpenCVIJRASETPublicationsNo ratings yet
- Real Time Human Body Posture Analysis Using Deep LearningDocument7 pagesReal Time Human Body Posture Analysis Using Deep LearningIJRASETPublications100% (1)
- A Review On Speech Emotion Classification Using Linear Predictive Coding and Neural NetworksDocument5 pagesA Review On Speech Emotion Classification Using Linear Predictive Coding and Neural NetworksIJRASETPublicationsNo ratings yet
- Design and Development of Cost-Effective 3D-PrinterDocument7 pagesDesign and Development of Cost-Effective 3D-PrinterIJRASETPublicationsNo ratings yet
- Skill Verification System Using Blockchain SkillVioDocument6 pagesSkill Verification System Using Blockchain SkillVioIJRASETPublicationsNo ratings yet
- Design and Analysis of Fixed Brake Caliper Using Additive ManufacturingDocument9 pagesDesign and Analysis of Fixed Brake Caliper Using Additive ManufacturingIJRASETPublicationsNo ratings yet
- Skin Lesions Detection Using Deep Learning TechniquesDocument5 pagesSkin Lesions Detection Using Deep Learning TechniquesIJRASETPublicationsNo ratings yet
- Comparative in Vivo Study On Quality Analysis On Bisacodyl of Different BrandsDocument17 pagesComparative in Vivo Study On Quality Analysis On Bisacodyl of Different BrandsIJRASETPublicationsNo ratings yet
- Credit Card Fraud Detection Using Machine Learning and BlockchainDocument9 pagesCredit Card Fraud Detection Using Machine Learning and BlockchainIJRASETPublications100% (1)
- A Blockchain and Edge-Computing-Based Secure Framework For Government Tender AllocationDocument10 pagesA Blockchain and Edge-Computing-Based Secure Framework For Government Tender AllocationIJRASETPublicationsNo ratings yet
- Real-Time Video Violence Detection Using CNNDocument7 pagesReal-Time Video Violence Detection Using CNNIJRASETPublicationsNo ratings yet
- Low Cost Scada System For Micro IndustryDocument5 pagesLow Cost Scada System For Micro IndustryIJRASETPublicationsNo ratings yet
- An Automatic Driver's Drowsiness Alert SystemDocument7 pagesAn Automatic Driver's Drowsiness Alert SystemIJRASETPublications100% (1)
- Smart Video Surveillance Using YOLO Algorithm and OpenCVDocument8 pagesSmart Video Surveillance Using YOLO Algorithm and OpenCVIJRASETPublications100% (1)
- Literature Review For Study of Characteristics of Traffic FlowDocument10 pagesLiterature Review For Study of Characteristics of Traffic FlowIJRASETPublicationsNo ratings yet
- CryptoDrive A Decentralized Car Sharing SystemDocument9 pagesCryptoDrive A Decentralized Car Sharing SystemIJRASETPublications100% (1)
- Experimental Study of Partial Replacement of Cement by Pozzolanic MaterialsDocument9 pagesExperimental Study of Partial Replacement of Cement by Pozzolanic MaterialsIJRASETPublicationsNo ratings yet
- Structural Design of Underwater Drone Using Brushless DC MotorDocument9 pagesStructural Design of Underwater Drone Using Brushless DC MotorIJRASETPublicationsNo ratings yet
- Vehicles Exhaust Smoke Detection and Location TrackingDocument8 pagesVehicles Exhaust Smoke Detection and Location TrackingIJRASETPublications100% (1)
- Application For Road Accident RescueDocument18 pagesApplication For Road Accident RescueIJRASETPublications100% (1)
- Achieving Maximum Power Point Tracking With Partial ShadingDocument10 pagesAchieving Maximum Power Point Tracking With Partial ShadingIJRASETPublicationsNo ratings yet
- Preparation of Herbal Hair DyeDocument12 pagesPreparation of Herbal Hair DyeIJRASETPublications100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Study On Potholes and Its Effects On Vehicular TrafficDocument6 pagesA Study On Potholes and Its Effects On Vehicular TrafficVinayNo ratings yet
- Kim - A Guideline For Pothole ClassificationDocument5 pagesKim - A Guideline For Pothole Classificationnome enteroNo ratings yet
- Functions and Installation of Paving Geosynthetics: S.K. ShuklaDocument8 pagesFunctions and Installation of Paving Geosynthetics: S.K. ShuklamojeebmashalNo ratings yet
- Road Maintenance Management ManualDocument66 pagesRoad Maintenance Management ManualEdgar MugaruraNo ratings yet
- PavementDocument33 pagesPavementreloaded63No ratings yet
- Road MaintenanceDocument64 pagesRoad MaintenanceWira PutrantoNo ratings yet
- SP Concare Pvt. LTD.: by Mr. Shrinivas Patil (Director)Document19 pagesSP Concare Pvt. LTD.: by Mr. Shrinivas Patil (Director)Ankita Baban GavadeNo ratings yet
- Annexure 3000 A.1 Manual of Roads Maintenance IRCDocument38 pagesAnnexure 3000 A.1 Manual of Roads Maintenance IRCErMelvinDias50% (2)
- RHD Road Condition Survey ManualDocument31 pagesRHD Road Condition Survey ManualBridge WingNo ratings yet
- Proposal On Dessie To Hayk Pavement DistressDocument107 pagesProposal On Dessie To Hayk Pavement DistressOmer AliyeNo ratings yet
- Revision of IRC 82 (H-6) - CompressedDocument6 pagesRevision of IRC 82 (H-6) - CompressedGobinder Singh Virdee100% (1)
- Method of Statement and C-ESMP1 (IBB)Document85 pagesMethod of Statement and C-ESMP1 (IBB)hysh89000No ratings yet
- Saqib Imran 0341-7549889Document24 pagesSaqib Imran 0341-7549889Saqib imranNo ratings yet
- Road Note 8 (Sub Soil Drainage)Document25 pagesRoad Note 8 (Sub Soil Drainage)Someshwar Rao ThakkallapallyNo ratings yet
- Pothole CSIR Tech GuideDocument52 pagesPothole CSIR Tech GuideMamphot100% (2)
- Cs 3610 Software Engineering Summer Software Requirements Specification Document Project Title Road Repair Tracking SystemDocument24 pagesCs 3610 Software Engineering Summer Software Requirements Specification Document Project Title Road Repair Tracking SystemGaurav JhaNo ratings yet
- A Pothole Is Said To Be More Deadly Than TerrorismDocument2 pagesA Pothole Is Said To Be More Deadly Than Terrorismdiviya balajiNo ratings yet
- Automatic Detection of Potholes and Speed Breakers: Monica.S, Priyanka Govind Nayak, Pruthvi.J, Soumya.K, Venkatesh S NDocument4 pagesAutomatic Detection of Potholes and Speed Breakers: Monica.S, Priyanka Govind Nayak, Pruthvi.J, Soumya.K, Venkatesh S NChandanaNo ratings yet
- Flexible Pavement FailureDocument31 pagesFlexible Pavement FailureDinesh Poudel100% (2)
- Design and Estimation of Flexible Pavement On Lane Carriageway With Paved Shoulder Using MX Road Software 1Document9 pagesDesign and Estimation of Flexible Pavement On Lane Carriageway With Paved Shoulder Using MX Road Software 1Vikaskumar ReddyNo ratings yet
- ERA Manual For Condition Assessment Calibration SectionsDocument29 pagesERA Manual For Condition Assessment Calibration SectionsTomas JesusNo ratings yet
- Structural Design of Railways and PavementsDocument5 pagesStructural Design of Railways and PavementsBibat, Alexah Marie D.No ratings yet
- Seminar Report On Potholes ProblemDocument23 pagesSeminar Report On Potholes ProblemSuraj PawaleNo ratings yet
- Implementation of Potholes Detection System Using Nanodrone and Image ProcessingDocument5 pagesImplementation of Potholes Detection System Using Nanodrone and Image ProcessingInternational Journal of Innovative Science and Research Technology100% (1)
- Performance Problems N Remedial Measures For Road Constructed On Ethiopia PDFDocument10 pagesPerformance Problems N Remedial Measures For Road Constructed On Ethiopia PDF류태하No ratings yet
- Presentation Pavement Failures 1507355219 83810Document26 pagesPresentation Pavement Failures 1507355219 83810suraj shetNo ratings yet
- 07-700 GRPA Assessment DefinitionsDocument19 pages07-700 GRPA Assessment DefinitionsTep PiNo ratings yet
- Patch Work: Patching With Base RepairDocument6 pagesPatch Work: Patching With Base Repairईशान्त शर्माNo ratings yet
- Introduction To HDM-4: Henry KeraliDocument52 pagesIntroduction To HDM-4: Henry KeraliJared MakoriNo ratings yet
- Porous Asphalt Experiments Huskvarna Sweden PDFDocument13 pagesPorous Asphalt Experiments Huskvarna Sweden PDFMatei PopaNo ratings yet