You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Principles of Electronics RedoneDocument153 pagesPrinciples of Electronics RedoneOdale MitchellNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Handbook For Solar PV Systems PDFDocument64 pagesHandbook For Solar PV Systems PDFyassine633No ratings yet
- Floating Solar SystemDocument8 pagesFloating Solar SystemSgurr Energy IndiaNo ratings yet
- EMTP - RV - IC-part2 Tower Foot ResistanceDocument19 pagesEMTP - RV - IC-part2 Tower Foot ResistanceRaja Shekar NalluriNo ratings yet
- BS 4533-102.1-1990, en 60598-2-1-1989Document12 pagesBS 4533-102.1-1990, en 60598-2-1-1989sumanNo ratings yet
- NPN Epitaxial Silicon Darlington TransistorDocument4 pagesNPN Epitaxial Silicon Darlington TransistorDemis FrancoNo ratings yet
- Renr7947renr7947-03 - Sis C9con DeifeDocument4 pagesRenr7947renr7947-03 - Sis C9con DeifeMiloš StijeljaNo ratings yet
- M.SC Physics Sem 1-2 2020-21Document13 pagesM.SC Physics Sem 1-2 2020-21Dixit VajaparaNo ratings yet
- MV Switchgear FocusDocument6 pagesMV Switchgear FocuskarunamcsNo ratings yet
- Extreme: Featured ProductsDocument3 pagesExtreme: Featured ProductsAmirul ShamNo ratings yet
- TF65-67 Thermal Overload Relay: Product-DetailsDocument5 pagesTF65-67 Thermal Overload Relay: Product-DetailsSergio PartidaNo ratings yet
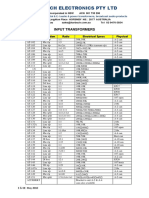
- Harbuch Electronics Pty LTD: Input TransformersDocument4 pagesHarbuch Electronics Pty LTD: Input Transformersattapapa100% (1)
- Gutor TechnologyDocument2 pagesGutor TechnologyFELIXDEJNo ratings yet
- Sensors and ProgrammingDocument24 pagesSensors and ProgrammingAndra Radu100% (2)
- 2929 Ijecs Ijens PDFDocument6 pages2929 Ijecs Ijens PDFbahmanNo ratings yet
- FX3U 32BL HardwareManual BatteryDocument1 pageFX3U 32BL HardwareManual BatteryCrescendo Solusi TamaNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument14 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAlecsandrNo ratings yet
- Vec 131KDocument35 pagesVec 131KBlack OnionNo ratings yet
- Heavy Duty Multipurpose Telephone Unit: Type HSB02Document13 pagesHeavy Duty Multipurpose Telephone Unit: Type HSB02advantage025No ratings yet
- Scenarios of Incidents For Trade Test Practices at HVTC (18-9-2021)Document7 pagesScenarios of Incidents For Trade Test Practices at HVTC (18-9-2021)藍青No ratings yet
- 2sc3055 PDFDocument3 pages2sc3055 PDFLuis CansinoNo ratings yet
- Sadara Inspection and Test Plan: Low Voltage (Up To 1Kv) Power and Control Cable SPITP-P-0B031-02 ElectricalDocument3 pagesSadara Inspection and Test Plan: Low Voltage (Up To 1Kv) Power and Control Cable SPITP-P-0B031-02 ElectricalJawaid GhazaliNo ratings yet
- Soft-switching active snubbers reduce losses in DC-DC convertersDocument13 pagesSoft-switching active snubbers reduce losses in DC-DC convertersashish_rewaNo ratings yet
- Motor Test Instructions PDFDocument2 pagesMotor Test Instructions PDFAriel DimacaliNo ratings yet
- Antenna SpecificationsDocument3 pagesAntenna SpecificationsRobertNo ratings yet
- PQube 3 Instruction Manual - Revision 1.9Document103 pagesPQube 3 Instruction Manual - Revision 1.9John LadinoNo ratings yet
- FM Global Property Loss Prevention Data Sheets: List of TablesDocument20 pagesFM Global Property Loss Prevention Data Sheets: List of TablesDhairyasheel PatilNo ratings yet
- Electrostatic Forces and Charging BodiesDocument14 pagesElectrostatic Forces and Charging BodiesArchit ShuklaNo ratings yet
- Serial Interface RS-449Document17 pagesSerial Interface RS-449Loryliza M DeiparineNo ratings yet