You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Silenced de Lisle Commando CarbineDocument6 pagesThe Silenced de Lisle Commando CarbineVienNgocQuang100% (1)
- Khmer Rouge Division 703Document216 pagesKhmer Rouge Division 703VienNgocQuang100% (1)
- FN 98 Mauser Model 98 Rifle Operators ManualDocument28 pagesFN 98 Mauser Model 98 Rifle Operators ManualAdam Ward100% (1)
- T-34 in Angola 1970s 1980s - WwiiafterwwiiDocument24 pagesT-34 in Angola 1970s 1980s - WwiiafterwwiiVienNgocQuang100% (1)
- Cam Total WarDocument142 pagesCam Total WarVienNgocQuangNo ratings yet
- Online Food Ordering System MiniDocument11 pagesOnline Food Ordering System Minijwala reddy83% (47)
- Bogiflex KGD20 - For PlantDocument13 pagesBogiflex KGD20 - For PlantAnonymous PVXBGg9TNo ratings yet
- Abb Sas GeneralDocument43 pagesAbb Sas Generalsabill arasyidNo ratings yet
- Lee-Enfield Rifle RF Short MksI and II (II)Document4 pagesLee-Enfield Rifle RF Short MksI and II (II)VienNgocQuangNo ratings yet
- GTC Express Itseez Opencv Webinar PDFDocument35 pagesGTC Express Itseez Opencv Webinar PDFazazel17No ratings yet
- To Opencv: Marvin SmithDocument29 pagesTo Opencv: Marvin SmithVienNgocQuang100% (1)
- Sc11 Cuda C BasicsDocument68 pagesSc11 Cuda C BasicsPoncho CoetoNo ratings yet
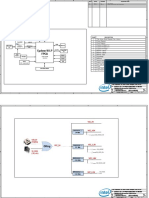
- c10lp Eval A1 SCHDocument56 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- Workshop Manual (Eng-Rus)Document40 pagesWorkshop Manual (Eng-Rus)VienNgocQuangNo ratings yet
- Role Profile Teaching Assistant HCMCDocument4 pagesRole Profile Teaching Assistant HCMCVienNgocQuangNo ratings yet
- c10lp Eval A1 SCHDocument17 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- c10lp Eval A1 SCHDocument17 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- ch2 PDFDocument6 pagesch2 PDFVienNgocQuangNo ratings yet
- C For MathematiciansDocument41 pagesC For MathematicianschinssuNo ratings yet
- E911 Provisioning System Software Test Plan (STP)Document11 pagesE911 Provisioning System Software Test Plan (STP)VienNgocQuangNo ratings yet
- Lee-Enfield Rifle 22RF Pattern 14Document5 pagesLee-Enfield Rifle 22RF Pattern 14VienNgocQuangNo ratings yet
- MP 2Document3 pagesMP 2VienNgocQuangNo ratings yet
- MP 3Document3 pagesMP 3VienNgocQuangNo ratings yet
- Angle Iload Uload IsDocument10 pagesAngle Iload Uload IsVienNgocQuangNo ratings yet
- Industrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)Document1 pageIndustrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)VienNgocQuangNo ratings yet
- MP 1Document4 pagesMP 1VienNgocQuangNo ratings yet
- People Republic of KampucheaDocument129 pagesPeople Republic of KampucheaVienNgocQuangNo ratings yet
- DllmeDocument1 pageDllmeVienNgocQuangNo ratings yet
- JM 154Document226 pagesJM 154VienNgocQuangNo ratings yet
- Nikolaidis Pitas - Facial Feature Extraction and Pose DeterminationDocument20 pagesNikolaidis Pitas - Facial Feature Extraction and Pose DeterminationVienNgocQuangNo ratings yet
- Summary and Future WorkDocument2 pagesSummary and Future WorkVienNgocQuangNo ratings yet
- TOSHIBA Global Internship 2018 - Application Guidelines & Position ListDocument17 pagesTOSHIBA Global Internship 2018 - Application Guidelines & Position ListVienNgocQuangNo ratings yet
- SummaryDocument1 pageSummaryVienNgocQuangNo ratings yet
- Krilna Rexroth 1pv2v3Document8 pagesKrilna Rexroth 1pv2v3ado_22No ratings yet
- Microstructure and Mechanical Properties of Borated Stainless Steel (304B) GTA and SMA WeldsDocument6 pagesMicrostructure and Mechanical Properties of Borated Stainless Steel (304B) GTA and SMA WeldsReza nugrahaNo ratings yet
- S32K14X RM Rev 4Document1,929 pagesS32K14X RM Rev 4Nguyễn Duy HùngNo ratings yet
- Pure Component VLE in Terms of Fugacity: CHEE 311 1Document8 pagesPure Component VLE in Terms of Fugacity: CHEE 311 1scienziatoNo ratings yet
- 4 A Short History of Islamic Science From Genesis To Decline ShortversionDocument24 pages4 A Short History of Islamic Science From Genesis To Decline ShortversionKateryna KuslyvaNo ratings yet
- Pro ESEDocument2 pagesPro ESEquadhirababilNo ratings yet
- Lift Use CaseDocument5 pagesLift Use Casedipankar_nath07No ratings yet
- 1piece Exam - Week 11 Solution (Geas)Document14 pages1piece Exam - Week 11 Solution (Geas)Elguapito DelisciusoNo ratings yet
- Chapter26to29-Bolt Tightening TorqueDocument36 pagesChapter26to29-Bolt Tightening TorqueEnam SembilanNo ratings yet
- BioFluid Mechanics 1Document29 pagesBioFluid Mechanics 1roxannedemaeyerNo ratings yet
- Final Defence 2078Document43 pagesFinal Defence 2078XxxNo ratings yet
- Quadratic Equation - MATH IS FUNDocument8 pagesQuadratic Equation - MATH IS FUNChanchan LebumfacilNo ratings yet
- m1100 s12 v1.1f en - Fender - DesignDocument48 pagesm1100 s12 v1.1f en - Fender - Designdzul fiqarNo ratings yet
- Wrong Number Series 23 June by Aashish AroraDocument53 pagesWrong Number Series 23 June by Aashish AroraSaurabh KatiyarNo ratings yet
- ElcometerDocument228 pagesElcometerMohammedMudassirNo ratings yet
- Kluang (A) S2 STPM 2019Document9 pagesKluang (A) S2 STPM 2019Rex KalNo ratings yet
- 02 Sub-Surface Exploration 01Document24 pages02 Sub-Surface Exploration 01kabir AhmedNo ratings yet
- TUC5+ Modbus ID Details PDFDocument10 pagesTUC5+ Modbus ID Details PDFvijikeshNo ratings yet
- Isentropic ExponentDocument2 pagesIsentropic ExponentAlf OtherspaceNo ratings yet
- Building Utilities 3: Room AcousticsDocument11 pagesBuilding Utilities 3: Room AcousticsIzzah LNo ratings yet
- Imn 903000 E06Document158 pagesImn 903000 E06Paul CasaleNo ratings yet
- Astar - 23b.trace - XZ Bimodal Next - Line Next - Line Next - Line Next - Line Drrip 1coreDocument4 pagesAstar - 23b.trace - XZ Bimodal Next - Line Next - Line Next - Line Next - Line Drrip 1corevaibhav sonewaneNo ratings yet
- Problem in Traffic Flow Theory: Speed-Density Relationships: Lnu LNK Q U KDocument10 pagesProblem in Traffic Flow Theory: Speed-Density Relationships: Lnu LNK Q U KRomel DecenillaNo ratings yet
- RXM XXX ES Data GuideDocument11 pagesRXM XXX ES Data GuideAstrid PorticaNo ratings yet
- Heavy Welding ShopDocument6 pagesHeavy Welding ShopSaurabh Katiyar100% (1)
- Quick Start Guide For Driver Compilation and InstallationDocument6 pagesQuick Start Guide For Driver Compilation and InstallationvijayNo ratings yet