You might also like
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Historia de La SeptuagintaDocument6 pagesHistoria de La SeptuagintaEddy Monstein100% (3)
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- Leonardo Boff Etica y MoralDocument51 pagesLeonardo Boff Etica y MoralAdrian Cruz82% (11)
- UF1275 - Selección, instalación, configuración y administración de los servidores de transferencia de archivosFrom EverandUF1275 - Selección, instalación, configuración y administración de los servidores de transferencia de archivosNo ratings yet
- El Otro SenderoDocument337 pagesEl Otro SenderoJuanpablo Arescuerenaga100% (1)
- Iniciación al diseño de circuitos impresos con Altium DesignerFrom EverandIniciación al diseño de circuitos impresos con Altium DesignerNo ratings yet
- 12 - Pasos DE LA CODEPENDENCIA PDFDocument29 pages12 - Pasos DE LA CODEPENDENCIA PDFasomapaNo ratings yet
- 12 - Pasos DE LA CODEPENDENCIA PDFDocument29 pages12 - Pasos DE LA CODEPENDENCIA PDFasomapaNo ratings yet
- Equipos de interconexión y servicios de red. IFCT0410From EverandEquipos de interconexión y servicios de red. IFCT0410No ratings yet
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeFrom EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo ratings yet
- 3 Entendiendo Los AVR AtmelDocument14 pages3 Entendiendo Los AVR Atmelr4ul90No ratings yet
- Manual Logo 230 RCDocument322 pagesManual Logo 230 RCBrucearturo100% (2)
- Manual Logo 230 RCDocument322 pagesManual Logo 230 RCBrucearturo100% (2)
- Conexionado PLC DeltaDocument16 pagesConexionado PLC DeltaJorgeNo ratings yet
- Rectas Paralelas PDFDocument87 pagesRectas Paralelas PDFJesús NamigtleNo ratings yet
- Rectas Paralelas PDFDocument87 pagesRectas Paralelas PDFJesús NamigtleNo ratings yet
- Programación de Puertos de La ComputadoraDocument10 pagesProgramación de Puertos de La ComputadoraMario Kevin100% (1)
- Curso PicaxeDocument104 pagesCurso Picaxechaparr_1No ratings yet
- Interoperatividad con Redes Industriales: Comunicación RS-232 y DigitalDocument16 pagesInteroperatividad con Redes Industriales: Comunicación RS-232 y DigitalCristhian DiazNo ratings yet
- Memoria de Calculo y Balance de Aire EjemploDocument10 pagesMemoria de Calculo y Balance de Aire EjemplojlgpsimpsonNo ratings yet
- Manual Programacion Android v3Document222 pagesManual Programacion Android v3Miguel Angel Blazquez GonzalezNo ratings yet
- Ejercicios VBDocument10 pagesEjercicios VBJose Juan LagunesNo ratings yet
- 1 Derecho Notarial y RegistralDocument38 pages1 Derecho Notarial y Registralreyna burboa100% (2)
- El Cuervo Edgar Allan Poe PDFDocument3 pagesEl Cuervo Edgar Allan Poe PDFOswaldo Alayo RosasNo ratings yet
- Instalación y configuración de periféricos microinformáticos. IFCT0309From EverandInstalación y configuración de periféricos microinformáticos. IFCT0309No ratings yet
- R. A. 1.1 Componentes Del MicroprocesadorDocument29 pagesR. A. 1.1 Componentes Del MicroprocesadorJOSE GILBERTO CANO GREENENo ratings yet
- Vdocuments - MX Operacion de Micros e InterfacesDocument29 pagesVdocuments - MX Operacion de Micros e Interfacesmario floresNo ratings yet
- Informe SeguidorDocument21 pagesInforme SeguidorimderNo ratings yet
- Micro Proce Sad orDocument42 pagesMicro Proce Sad orJhuver HerreraNo ratings yet
- Practik 3 de OlivaresDocument5 pagesPractik 3 de OlivaresRodrigo LimonNo ratings yet
- Cuadernode Ejercicios Robotica Carlo ScapolatemporeDocument32 pagesCuadernode Ejercicios Robotica Carlo ScapolatemporeiwchochoNo ratings yet
- Sistemas de La Computadora XTDocument47 pagesSistemas de La Computadora XTlehoaqp100% (1)
- Cronología y evolución de los microprocesadores IntelDocument10 pagesCronología y evolución de los microprocesadores IntelDaniel Antonio Urdaneta NaimNo ratings yet
- Sistemas EmbebidosDocument86 pagesSistemas EmbebidosfrednielsNo ratings yet
- Apuntes HardwareDocument7 pagesApuntes Hardwareripela49011No ratings yet
- Microcontrolador 8051Document60 pagesMicrocontrolador 8051Adrian LarrauriNo ratings yet
- Teoría de PLCDocument52 pagesTeoría de PLCGhulam AbbasNo ratings yet
- Reporte Proyecto FinalDocument25 pagesReporte Proyecto Finalluis angelNo ratings yet
- Tema2 1 E S InterrupcionesDocument30 pagesTema2 1 E S InterrupcionesEnel CaleroNo ratings yet
- U3l1 Get Started W EtDocument18 pagesU3l1 Get Started W EtAlvaro arceNo ratings yet
- Unidad 07 Micro20I EPIET PDFDocument89 pagesUnidad 07 Micro20I EPIET PDFCésar GuerreroNo ratings yet
- Diferencia Entre Un Microprocesador y Un MicrocontroladorDocument7 pagesDiferencia Entre Un Microprocesador y Un MicrocontroladorIrving Jesus Sanchez CamposNo ratings yet
- Microprocesadores Intel 70-90Document13 pagesMicroprocesadores Intel 70-90Daniel Antonio Urdaneta NaimNo ratings yet
- 8085Document3 pages8085teteNo ratings yet
- ARQ - Sesion 15 PC 64BITS - INT-fusionadoDocument126 pagesARQ - Sesion 15 PC 64BITS - INT-fusionadoROBEL LIZANDRO VILCA QUISPENo ratings yet
- Interfaz Ieee 488 para PCDocument102 pagesInterfaz Ieee 488 para PCBen AvrahamNo ratings yet
- Trabajo de Motherboard PDFDocument7 pagesTrabajo de Motherboard PDFXimena BlanquicettNo ratings yet
- Reporte U5Document20 pagesReporte U5luis angelNo ratings yet
- Informe de PLCDocument11 pagesInforme de PLCAnderson Xavier Morales RoseroNo ratings yet
- Practica 2 Letrero ArduinoDocument18 pagesPractica 2 Letrero ArduinoVictor VicmanNo ratings yet
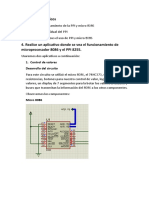
- Objetivos Específicos: 1. Control de Valores Desarrollo Del CircuitoDocument12 pagesObjetivos Específicos: 1. Control de Valores Desarrollo Del CircuitoANGEL ORTEGA ROMERONo ratings yet
- MicroControladores PIC PDFDocument43 pagesMicroControladores PIC PDFULISES GIAMPORTONENo ratings yet
- Practicas Microprocesadores 2015 2Document67 pagesPracticas Microprocesadores 2015 2juanNo ratings yet
- Automatización tratamiento aguas residualesDocument8 pagesAutomatización tratamiento aguas residualesAndres MartínezNo ratings yet
- Interfaces EySDocument12 pagesInterfaces EySJOSEJOSENo ratings yet
- Tecnológico de Estudios Superiores de JocotitlánDocument7 pagesTecnológico de Estudios Superiores de JocotitlánEmmanuel GonzalezNo ratings yet
- Programación en Lenguaje EnsambladorDocument35 pagesProgramación en Lenguaje EnsambladorRodrigo GarciaNo ratings yet
- Te01 - Arquitectura de Un Controlador Lógico ProgramableDocument24 pagesTe01 - Arquitectura de Un Controlador Lógico ProgramableAndre MangoNo ratings yet
- PC XT 8086Document31 pagesPC XT 8086Adrian OdrielNo ratings yet
- Aplicaciones de Los MicrocontroladoresDocument75 pagesAplicaciones de Los MicrocontroladoresBenny M AcuayteNo ratings yet
- Microprocesador 8085 características y partes internasDocument11 pagesMicroprocesador 8085 características y partes internasAdderly Chinchero TorresNo ratings yet
- Curso-PlcDocument30 pagesCurso-PlcR E P A R A N D O E N C A S ANo ratings yet
- Puertos y Buses de Comunicación para MicrocontroladoresDocument5 pagesPuertos y Buses de Comunicación para MicrocontroladoresNestor Vargas100% (5)
- Microprocesador 8085Document27 pagesMicroprocesador 8085Jorge Aguirre0% (1)
- Unidad 6 I Descripcioon Sistemas Secuenciasles Programados Siemens 1200 PDFDocument50 pagesUnidad 6 I Descripcioon Sistemas Secuenciasles Programados Siemens 1200 PDFDavidDelgado100% (1)
- Modelo Perfil de ProyectoDocument5 pagesModelo Perfil de ProyectoRoger AntonioNo ratings yet
- Consulta Componenetes de Computo ResueltaDocument58 pagesConsulta Componenetes de Computo ResueltaLUIS DAVID PEREA CORDOBANo ratings yet
- INFORME mpZ80Document14 pagesINFORME mpZ80Cristian PerugachiNo ratings yet
- Sesion 1 Atmega8Document41 pagesSesion 1 Atmega8sheya79No ratings yet
- M. en TI. Jorge Buendía Gómez, "Laboratorio de Microprocesadores", FES Cuautitlan, 2015l Aracil 2da EdDocument152 pagesM. en TI. Jorge Buendía Gómez, "Laboratorio de Microprocesadores", FES Cuautitlan, 2015l Aracil 2da EdJesús Namigtle0% (1)
- Interrupciones de Hardware y SoftwareDocument6 pagesInterrupciones de Hardware y SoftwareHigh777f100% (2)
- ReglamentoSumo PDFDocument6 pagesReglamentoSumo PDFJesús NamigtleNo ratings yet
- Practica 3Document4 pagesPractica 3Edgar Eucebio Mamani ApazaNo ratings yet
- Programa Int. Capacitación Cruzada 2019-2Document7 pagesPrograma Int. Capacitación Cruzada 2019-2Jesús NamigtleNo ratings yet
- ReglamentoSumo PDFDocument6 pagesReglamentoSumo PDFJesús NamigtleNo ratings yet
- Programa Int. Capacitación Cruzada 2019-2Document7 pagesPrograma Int. Capacitación Cruzada 2019-2Jesús NamigtleNo ratings yet
- Reglamento para La Expedicion de Certificados de IncapacidadDocument4 pagesReglamento para La Expedicion de Certificados de IncapacidadJesús NamigtleNo ratings yet
- Clase 2Document50 pagesClase 2rammtonNo ratings yet
- Chipsets: evolución desde 386/486 hasta 64 bitsDocument26 pagesChipsets: evolución desde 386/486 hasta 64 bitsCarlos HernandezNo ratings yet
- 12 Pasos AADocument10 pages12 Pasos AAJesús NamigtleNo ratings yet
- Repertorio de Instrucciones Del Pic16f84Document12 pagesRepertorio de Instrucciones Del Pic16f84fuunnyNo ratings yet
- Diccionario Armando HoyosDocument71 pagesDiccionario Armando HoyosIvonne Almazan88% (8)
- Sthepen Hawking. - Juega Dios A Los DadosDocument7 pagesSthepen Hawking. - Juega Dios A Los DadosRosana Luz Durán MugniNo ratings yet
- CU00322A Codigo Ejemplo Visual Basic Forms Labels Textbox Command Buttons PDFDocument7 pagesCU00322A Codigo Ejemplo Visual Basic Forms Labels Textbox Command Buttons PDFMartha CruzNo ratings yet
- MATLAB GUIDE New PDFDocument84 pagesMATLAB GUIDE New PDFkarla DominguezNo ratings yet
- Chan y Tiburcio - Guía para La Elaboración de Materiales Orientados Al Aprendizaje AutogestivoDocument8 pagesChan y Tiburcio - Guía para La Elaboración de Materiales Orientados Al Aprendizaje AutogestivoKere G. Caudillo100% (1)
- Ups CT006776 PDFDocument95 pagesUps CT006776 PDFJesús NamigtleNo ratings yet
- Mecanismos y Dinamica de MaquinariaDocument224 pagesMecanismos y Dinamica de MaquinariaJesús Namigtle91% (11)
- Returns by Year: Stocks, Bonds, Bills 1928-2016Document37 pagesReturns by Year: Stocks, Bonds, Bills 1928-2016Natalia Soler CifuentesNo ratings yet
- Tesis Seguridad Privada 4973Document33 pagesTesis Seguridad Privada 4973jvallejo810125No ratings yet
- SRAMDocument12 pagesSRAMque buenoNo ratings yet
- 7 Exquisitas Recetas de Ensaladas para Diabéticos - PDFDocument14 pages7 Exquisitas Recetas de Ensaladas para Diabéticos - PDFElmer Silva ReañoNo ratings yet
- Ley Federal Del Trabajo Art 132 F27 Obligaciones Del PatronDocument7 pagesLey Federal Del Trabajo Art 132 F27 Obligaciones Del PatronMirandaNo ratings yet
- Módulo 2Document3 pagesMódulo 2mmanoumNo ratings yet
- 2022.10.20 Catalogo de ProductosDocument17 pages2022.10.20 Catalogo de ProductosCarlos Giovanni Valdivia CornejoNo ratings yet
- Sesion de Apresndizaje de CT 3° AB 4 de OCTUBREDocument6 pagesSesion de Apresndizaje de CT 3° AB 4 de OCTUBREYliceo Gonzales ÑaupariNo ratings yet
- Saneamiento AmbientalDocument13 pagesSaneamiento AmbientalThainette BurgosNo ratings yet
- Examen Final Dinamica 2021-2Document7 pagesExamen Final Dinamica 2021-2Sergio Fernandez quispeNo ratings yet
- EstudioEdáficoDocument5 pagesEstudioEdáficovaleraangelNo ratings yet
- Ejercicios Del Tema 1Document10 pagesEjercicios Del Tema 1jose alberto mateosNo ratings yet
- 4 - Guía Arreglos 2021Document17 pages4 - Guía Arreglos 2021AnaNo ratings yet
- PHSEQ-P-05 Procedimiento para La Realizacion de Evaluaciones MedicasDocument9 pagesPHSEQ-P-05 Procedimiento para La Realizacion de Evaluaciones Medicasadriana diazNo ratings yet
- Acuerdo sobre acciones extraordinarias para concluir el ciclo escolar 2020-2021Document15 pagesAcuerdo sobre acciones extraordinarias para concluir el ciclo escolar 2020-2021Indira GonzalezNo ratings yet
- Mapeo de Procesos-CalidadDocument19 pagesMapeo de Procesos-CalidadErick EdsonNo ratings yet
- Autoridades responsables del proceso de contrataciónDocument8 pagesAutoridades responsables del proceso de contrataciónVicvicXGonzxNo ratings yet
- Práctica #1: Características Físicas Y Morfológicas de Vegetales de Uso IndustrialDocument7 pagesPráctica #1: Características Físicas Y Morfológicas de Vegetales de Uso IndustrialDainer SalgadoNo ratings yet
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - PRACTICO - RESPONSABILIDAD SOCIAL EMPRESARIAL - (GRUPO B08)Document15 pagesEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - PRACTICO - RESPONSABILIDAD SOCIAL EMPRESARIAL - (GRUPO B08)Mauricio Devia GallegoNo ratings yet
- Rehabilitar La PreexistenciaDocument8 pagesRehabilitar La PreexistenciaIVANNA ARRIAGA DELGADONo ratings yet
- 006 SlutDocument3 pages006 SlutMarcelo Enrique Delgado Guzman100% (1)
- Eras Geologicas Grado 9° 2019-2020Document39 pagesEras Geologicas Grado 9° 2019-2020MANUELA GIRALDO TORRESNo ratings yet
- Informe Saponificación Del Aceite UsadoDocument7 pagesInforme Saponificación Del Aceite Usado05-OB-HU-CARLA DANIELA VILCAS CARRIONNo ratings yet
- Biografía Del Río SeturmaDocument12 pagesBiografía Del Río SeturmaJorge Luis Gonzalez BermudezNo ratings yet
- Solución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IDocument5 pagesSolución Guia N°5. ESTEQUIOMETRIA DE LA REACCION IPablo Santillán LopezNo ratings yet
- Formatos de Actividades de Aprendizajes MINEDUDocument3 pagesFormatos de Actividades de Aprendizajes MINEDUESTEPHANY CRISTHEL NEGRON CHACONNo ratings yet