You might also like
- Guia Básico de Kundalini YogaDocument11 pagesGuia Básico de Kundalini YogaJuínaNo ratings yet
- TCC - Feedback: Um Estudo Sobre A Percepção Dos Gestores de Uma Instituição Financeira Do Distrito Federal - Itaú-Unibanco S/aDocument24 pagesTCC - Feedback: Um Estudo Sobre A Percepção Dos Gestores de Uma Instituição Financeira Do Distrito Federal - Itaú-Unibanco S/aBruce Rodrigues De AraújoNo ratings yet
- Os Quatro Compromissos - Don Miguel RuizDocument65 pagesOs Quatro Compromissos - Don Miguel RuizCarlos Daniel100% (6)
- Certificado Atividade Minicurso ConeduDocument1 pageCertificado Atividade Minicurso ConedumaxxagainNo ratings yet
- Curriculum Vitae PDFDocument7 pagesCurriculum Vitae PDFmaxxagainNo ratings yet
- Atividade Emergencial 02 CMMS 6oDocument2 pagesAtividade Emergencial 02 CMMS 6omaxxagain100% (1)
- Fontes Chaveadas 2012 Parte-3Document56 pagesFontes Chaveadas 2012 Parte-3maxxagain100% (1)
- PpgccufmgDocument54 pagesPpgccufmgmaxxagainNo ratings yet
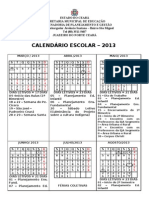
- CALENDÁRIO ESCOLAR 2013 Com Legenda - Atualizado 2Document3 pagesCALENDÁRIO ESCOLAR 2013 Com Legenda - Atualizado 2Secretaria de Educação de Juazeiro do NorteNo ratings yet
- Quiz BNCCDocument27 pagesQuiz BNCCEdilan de Araujo100% (1)
- SENTENÇA - 1056145-41.2016.8.26.0053 - Mandado de Segurança - Lei SecaDocument8 pagesSENTENÇA - 1056145-41.2016.8.26.0053 - Mandado de Segurança - Lei SecaMisael Alexis de MoraesNo ratings yet
- 6 - Formação Dos ContratosDocument8 pages6 - Formação Dos ContratosDeborahKobNo ratings yet
- Se Perguntarem Por Mim Digam Que Voei (Finalizado)Document8 pagesSe Perguntarem Por Mim Digam Que Voei (Finalizado)Carolina AlvesNo ratings yet
- Livro BioestatísticaDocument10 pagesLivro BioestatísticaCrislane RamosNo ratings yet
- Os Verdes - Acórdão TJUEDocument17 pagesOs Verdes - Acórdão TJUEFelipe RibeiroNo ratings yet
- Esquema Dir. Penal (Teoria Do Crime - Comparação Sistemas)Document2 pagesEsquema Dir. Penal (Teoria Do Crime - Comparação Sistemas)tiagoslealNo ratings yet
- Tipos de Família - Modelos e CaracterísticasDocument6 pagesTipos de Família - Modelos e CaracterísticasLara SoutoNo ratings yet
- Alceu Pereira Lima Neto e Outra X Banco Do Brasil S.A. (Ordinaria de Resolucao ContratualDocument57 pagesAlceu Pereira Lima Neto e Outra X Banco Do Brasil S.A. (Ordinaria de Resolucao ContratualFlávio Ricardo Borges MendonçaNo ratings yet
- Multiculturalismo e Escola Inclusiva TextoDocument11 pagesMulticulturalismo e Escola Inclusiva TextoDouglas FerreiraNo ratings yet
- Feminino e Masculino Nos Materiais PedagógicosDocument56 pagesFeminino e Masculino Nos Materiais PedagógicosSandra FerrazNo ratings yet
- Fibrasan - CatálogoDocument11 pagesFibrasan - CatálogojcencicNo ratings yet
- Trabalho e Consolidação Das Ideias Basicas - Du Bocage SonetosDocument42 pagesTrabalho e Consolidação Das Ideias Basicas - Du Bocage SonetosPaulo Sergeo50% (2)
- Selá-Expressão BíblicaDocument2 pagesSelá-Expressão BíblicavaikaganoNo ratings yet
- R - D - Fernanda Cristina Leite de OliveiraDocument173 pagesR - D - Fernanda Cristina Leite de Oliveiravanessa waltersNo ratings yet
- V01 34104 Operador de Armazenagem PDFDocument57 pagesV01 34104 Operador de Armazenagem PDFZe Nabo100% (1)
- Aula 11-AdministrativoDocument136 pagesAula 11-AdministrativosolutemarNo ratings yet
- Complexos Tetraédricos + Jahn-TellerDocument2 pagesComplexos Tetraédricos + Jahn-TellerPaula CarolinaNo ratings yet
- Plano de Ensino 6 Ao 9 AnoDocument14 pagesPlano de Ensino 6 Ao 9 AnoSergio Oliveira PauloNo ratings yet
- 1 - Ficha de Seguranca AC4 Super FDocument7 pages1 - Ficha de Seguranca AC4 Super FEdmilson Espindola Dos SantosNo ratings yet
- Problemas Por Assunto-08-Energia Potencial e Conservacao Da EnergiaDocument16 pagesProblemas Por Assunto-08-Energia Potencial e Conservacao Da EnergiaabednegoNo ratings yet
- A Vida Após A MorteDocument15 pagesA Vida Após A MorteAlcides CoelhoNo ratings yet
- Educação Das Relações Étnicos - Raciais - Atividade ContextualizadaDocument2 pagesEducação Das Relações Étnicos - Raciais - Atividade ContextualizadaCamila - atendimento pedagogico100% (1)
- Diagnóstica 3 Ano PDFDocument13 pagesDiagnóstica 3 Ano PDFElga Amarante CamposNo ratings yet
- Grecia e RomaDocument3 pagesGrecia e RomaAndres BandeiraNo ratings yet
- Programa de Assisntencia Integral A Saude Do IdosoDocument28 pagesPrograma de Assisntencia Integral A Saude Do IdosoxxlozaninxxNo ratings yet