You might also like
- Elliott Wave Timing Beyond Ordinary Fibonacci MethodsFrom EverandElliott Wave Timing Beyond Ordinary Fibonacci MethodsRating: 4 out of 5 stars4/5 (21)
- DSP Exp. 5Document7 pagesDSP Exp. 501haval 10No ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Experiment No.:02 Study of Time Properties of Signals Page NoDocument10 pagesExperiment No.:02 Study of Time Properties of Signals Page No033Kanak SharmaNo ratings yet
- DSP EXP. 5 SolutionDocument10 pagesDSP EXP. 5 Solution01haval 10No ratings yet
- Time Scaled Modulated Signal and Its Variation in Real Saturated Time Shifted Communication StrategiesDocument8 pagesTime Scaled Modulated Signal and Its Variation in Real Saturated Time Shifted Communication Strategiesiaset123No ratings yet
- Digital Signal ProcessorsDocument6 pagesDigital Signal ProcessorsVenkatesh SubramanyaNo ratings yet
- SignalsDocument7 pagesSignalsRavi K NNo ratings yet
- Time Signals Signal Transformation Gate Study Material in PDF 508b0be4 PDFDocument12 pagesTime Signals Signal Transformation Gate Study Material in PDF 508b0be4 PDFHarshita ShuklaNo ratings yet
- Digital Signal Processing Eee Fifth by L N Sith SirDocument55 pagesDigital Signal Processing Eee Fifth by L N Sith Sirnikita jagtapNo ratings yet
- Lab Report Exp 1Document20 pagesLab Report Exp 1Elisbeth MurugasNo ratings yet
- Digital Signal Processing: Dr. MuayadDocument18 pagesDigital Signal Processing: Dr. MuayadAli KareemNo ratings yet
- What Is Signal Processing, and Why Study It?: 1.1 SignalsDocument8 pagesWhat Is Signal Processing, and Why Study It?: 1.1 SignalsskybosgNo ratings yet
- Lab 03 Properties of Signals and Various SystemsDocument7 pagesLab 03 Properties of Signals and Various SystemsAayan ShahNo ratings yet
- Experiment No. 2Document4 pagesExperiment No. 2Sandeep KumarNo ratings yet
- Digital SignalDocument42 pagesDigital SignalRuby ManauisNo ratings yet
- Experiment No.2: Aim: Introduction of Elementary and Complex Signals. TheoryDocument4 pagesExperiment No.2: Aim: Introduction of Elementary and Complex Signals. TheorySaloni Agarwal100% (1)
- Ec8352 Signals and Systems Course Material PDFDocument55 pagesEc8352 Signals and Systems Course Material PDFmmurali09No ratings yet
- DSP Ese497Document90 pagesDSP Ese497Nikhil Kumar SawNo ratings yet
- Objectives: Signals in Natural Domain Chapter 1: IntroductionDocument10 pagesObjectives: Signals in Natural Domain Chapter 1: IntroductionsivatejamundlamuriNo ratings yet
- Asp Unit 1Document57 pagesAsp Unit 1Gaurav KumarNo ratings yet
- ADSP LAB, First Year M. Tech. E&TCDocument8 pagesADSP LAB, First Year M. Tech. E&TCGhanshyamPatankarNo ratings yet
- Basic Operations On Signals PDFDocument8 pagesBasic Operations On Signals PDFNaveen DuraNo ratings yet
- Signal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDocument4 pagesSignal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDarren GegantinoNo ratings yet
- Signals & Systems Unit IDocument34 pagesSignals & Systems Unit ILoganathan LoguNo ratings yet
- OctaveDocument122 pagesOctaveTarik ZiadNo ratings yet
- Experiment - 2: Saransh Singhal & Sambhav JainDocument13 pagesExperiment - 2: Saransh Singhal & Sambhav Jaintanya chaudharyNo ratings yet
- Information and Signal TheoryDocument118 pagesInformation and Signal TheorySalma AbdelfadilNo ratings yet
- 2 Discrete-Time Signals and Discrete-Time SystemsDocument29 pages2 Discrete-Time Signals and Discrete-Time SystemsVeena Divya KrishnappaNo ratings yet
- W2 Lesson 2 - Theory of Discrete-Time Signals and Systems - ModuleDocument9 pagesW2 Lesson 2 - Theory of Discrete-Time Signals and Systems - ModuleJohn Patrick PinedaNo ratings yet
- Chapter OneDocument14 pagesChapter OnekalshkinguNo ratings yet
- 20ec303-Signals and Signals-Course MaterialDocument55 pages20ec303-Signals and Signals-Course MaterialperiasamyNo ratings yet
- Introduction To Discrete Time Signals and Systems - SBMA1402Document157 pagesIntroduction To Discrete Time Signals and Systems - SBMA1402Kavya MamillaNo ratings yet
- Continuous Time and Discrete Time Signals and SystemsDocument17 pagesContinuous Time and Discrete Time Signals and SystemsDianne BellonNo ratings yet
- Exp No 4Document7 pagesExp No 4Juee JamsandekarNo ratings yet
- Angle Modulation PDFDocument129 pagesAngle Modulation PDFSudhanshu KumarNo ratings yet
- DSP Lecture Notes 6th Sem Etc Complete 1588251170Document61 pagesDSP Lecture Notes 6th Sem Etc Complete 1588251170Prasad LoyalNo ratings yet
- Signal Analysis: 1.1 Analogy of Signals With VectorsDocument29 pagesSignal Analysis: 1.1 Analogy of Signals With VectorsRamachandra ReddyNo ratings yet
- Introduction To LTI Representation and Transfer FunctionDocument26 pagesIntroduction To LTI Representation and Transfer FunctionNoel Lorenzo PagatpatNo ratings yet
- Two Applications For Power Quality Analysis Using The Matlab Wavelet ToolboxDocument5 pagesTwo Applications For Power Quality Analysis Using The Matlab Wavelet ToolboxRaghvendra DeshpandeNo ratings yet
- A1 SPlabDocument17 pagesA1 SPlabJAYASHREENo ratings yet
- Intro-to-WFE-and-SamplingDocument12 pagesIntro-to-WFE-and-Samplinghamza mohsenNo ratings yet
- ADSP AssignmentDocument15 pagesADSP AssignmentPrabhat Ranjan TripathiNo ratings yet
- Time Scaling Property Using ExcelDocument3 pagesTime Scaling Property Using ExceljojeNo ratings yet
- Lab 3Document5 pagesLab 3satoruheineNo ratings yet
- Ambardar Book ChaptersDocument809 pagesAmbardar Book ChaptersJeffrey Hufford100% (1)
- Discrete Time Signals and Fourier SeriesDocument34 pagesDiscrete Time Signals and Fourier SeriesFatima AhsanNo ratings yet
- Lecture 2Document28 pagesLecture 2Zamshed FormanNo ratings yet
- Digital Signal Processing For Complete Idiots by D SmithDocument126 pagesDigital Signal Processing For Complete Idiots by D SmithSusan Lam71% (7)
- DSP An IntroductionDocument15 pagesDSP An IntroductionRaja RamanNo ratings yet
- Lab 5Document3 pagesLab 5Noman Zahoor0% (1)
- DSP Lab 6Document7 pagesDSP Lab 6Ali MohsinNo ratings yet
- Unit I - Introduction SyllabusDocument18 pagesUnit I - Introduction Syllabusrahaman mahamadNo ratings yet
- Lab No 6Document12 pagesLab No 6Niveditha NisanamNo ratings yet
- Keywords: Introduction To Signals and Systems, Signal Classification, Continuous andDocument12 pagesKeywords: Introduction To Signals and Systems, Signal Classification, Continuous andbsnl007No ratings yet
- Statistics and Probability Are Used in Digital Signal Processing To Characterize Signals and TheprocessesDocument63 pagesStatistics and Probability Are Used in Digital Signal Processing To Characterize Signals and Theprocesses1985 productionNo ratings yet
- Introduction To SignalsDocument13 pagesIntroduction To SignalsJohnny MessiahNo ratings yet
- Unit I (DSP)Document24 pagesUnit I (DSP)kjairam80No ratings yet
- DSP Lab 0Document18 pagesDSP Lab 0malakkfathallahNo ratings yet
- Signal ProcessingDocument38 pagesSignal ProcessingSamson MumbaNo ratings yet
- CHED Endorsement Letter Request October 2 2018Document1 pageCHED Endorsement Letter Request October 2 2018Benjhon S. ElarcosaNo ratings yet
- Assignment in ECE 11Document1 pageAssignment in ECE 11Benjhon S. ElarcosaNo ratings yet
- Boolean QuizDocument3 pagesBoolean QuizBenjhon S. ElarcosaNo ratings yet
- Numerical Reasoning Tests: Don't Lose Out On That Job. Practice Aptitude Tests TodayDocument3 pagesNumerical Reasoning Tests: Don't Lose Out On That Job. Practice Aptitude Tests TodayBenjhon S. Elarcosa100% (1)
- Lecture 3: Boolean Algebra I The Basics: Learning OutcomesDocument8 pagesLecture 3: Boolean Algebra I The Basics: Learning OutcomesBenjhon S. ElarcosaNo ratings yet
- Deformable Review QuizDocument37 pagesDeformable Review QuizBenjhon S. ElarcosaNo ratings yet
- Computational Complexity: ECE 3340 - David MayerichDocument12 pagesComputational Complexity: ECE 3340 - David MayerichBenjhon S. ElarcosaNo ratings yet
- Numerical Reasoning Tests: Don't Lose Out On That Job. Practice Aptitude Tests TodayDocument3 pagesNumerical Reasoning Tests: Don't Lose Out On That Job. Practice Aptitude Tests TodayBenjhon S. Elarcosa100% (1)
- DocumentDocument1 pageDocumentBenjhon S. ElarcosaNo ratings yet
- ECE 04 Midterm ExamDocument3 pagesECE 04 Midterm ExamBenjhon S. ElarcosaNo ratings yet
- Re AccreditationDocument6 pagesRe AccreditationBenjhon S. ElarcosaNo ratings yet
- Agusan Del Sur State College of Agriculture and Technology: ACTION PLAN FOR 2018-2019Document1 pageAgusan Del Sur State College of Agriculture and Technology: ACTION PLAN FOR 2018-2019Benjhon S. ElarcosaNo ratings yet
- PrinCom Chapter 5Document9 pagesPrinCom Chapter 5Benjhon S. ElarcosaNo ratings yet
- Organization Performance Satisfaction Survey Form: Agusan Del Sur State College of Agriculture and TechnologyDocument1 pageOrganization Performance Satisfaction Survey Form: Agusan Del Sur State College of Agriculture and TechnologyBenjhon S. ElarcosaNo ratings yet
- F3 Letter RequestDocument1 pageF3 Letter RequestBenjhon S. ElarcosaNo ratings yet
- Chap 1 AssignmentDocument7 pagesChap 1 AssignmentBenjhon S. ElarcosaNo ratings yet
- ConclusionsDocument40 pagesConclusionsBenjhon S. ElarcosaNo ratings yet
- F1-Member Information SheetDocument1 pageF1-Member Information SheetBenjhon S. ElarcosaNo ratings yet
- Final Coaching SociologyDocument73 pagesFinal Coaching SociologyBenjhon S. Elarcosa91% (11)
- Agusan Del Sur State College of Agriculture and TechnologyDocument2 pagesAgusan Del Sur State College of Agriculture and TechnologyBenjhon S. ElarcosaNo ratings yet
- Change Number Request FormDocument1 pageChange Number Request FormBenjhon S. Elarcosa100% (2)
- Rationale For Disaster and Loss ControlDocument13 pagesRationale For Disaster and Loss ControlBenjhon S. ElarcosaNo ratings yet
- Downloadfile 2Document18 pagesDownloadfile 2Benjhon S. ElarcosaNo ratings yet
- M8916Document9 pagesM8916ykcorNo ratings yet
- FPS Manual de OperacionDocument131 pagesFPS Manual de OperacionEmmanuel Soberano HernandezNo ratings yet
- KFG 2023Document20 pagesKFG 2023ANo ratings yet
- RFD 08Document30 pagesRFD 08Surajit BanerjeeNo ratings yet
- Huawei SingleRAN IP Migration SolutionDocument24 pagesHuawei SingleRAN IP Migration SolutionHazem Maher100% (1)
- Guara B.V.: Revision Index Rev. Description And/Or Revised SheetsDocument5 pagesGuara B.V.: Revision Index Rev. Description And/Or Revised SheetsAlan Barros SallesNo ratings yet
- Service Bulletin: Business and Regional SystemsDocument12 pagesService Bulletin: Business and Regional SystemsNIXON BENITEZNo ratings yet
- slvt145hDocument77 pagesslvt145hgubiliNo ratings yet
- Gs1m Diode SMDDocument2 pagesGs1m Diode SMDandrimanadNo ratings yet
- Artificial Lift Electric Submersible Pumps (ESP) May 2010 (Compatibility Mode)Document162 pagesArtificial Lift Electric Submersible Pumps (ESP) May 2010 (Compatibility Mode)Calota ConstantinNo ratings yet
- Unit - I: Electrical Distribution SystemsDocument21 pagesUnit - I: Electrical Distribution SystemsHay JaytaNo ratings yet
- PMSM Sensorless Control ThesisDocument6 pagesPMSM Sensorless Control Thesisafknwride100% (2)
- Analysis and Design of Transmission TowersDocument50 pagesAnalysis and Design of Transmission Towersadnan-651358No ratings yet
- TTV-IOM November 2006Document23 pagesTTV-IOM November 2006Ngô Khắc ToảnNo ratings yet
- Usurface IIIDocument2 pagesUsurface IIIjanurNo ratings yet
- Radiation ManualDocument66 pagesRadiation ManualKiann DomingoNo ratings yet
- COMEM Cataloge - Spare-Parts - 12-05-2021Document22 pagesCOMEM Cataloge - Spare-Parts - 12-05-2021VanaNo ratings yet
- Protection Control Terminals Configuration Guideline 1MRS750745 MUM PDFDocument162 pagesProtection Control Terminals Configuration Guideline 1MRS750745 MUM PDFngocanhvyNo ratings yet
- Alternator ReplacementDocument64 pagesAlternator ReplacementmatiaspepeNo ratings yet
- Vp01-03-04-Axitub Solid 4-800T 30-6 - UkDocument2 pagesVp01-03-04-Axitub Solid 4-800T 30-6 - UkConstantin294No ratings yet
- Huggins, 2002. Simple Method To Determine Electronic and Ionic ComponentsDocument14 pagesHuggins, 2002. Simple Method To Determine Electronic and Ionic ComponentsSol AngelNo ratings yet
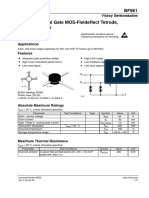
- BF961 PDFDocument8 pagesBF961 PDFnooneezNo ratings yet
- FTTH Fast Connector SC/APC B Type: Feature Technical SpecificationDocument3 pagesFTTH Fast Connector SC/APC B Type: Feature Technical SpecificationvicenteNo ratings yet
- ECE 4006 Project Proposal and Presentation: Group Name: Altera NIOS Robot GroupDocument6 pagesECE 4006 Project Proposal and Presentation: Group Name: Altera NIOS Robot GroupLuela Del Rosario CabreraNo ratings yet
- Virtual Acoustics and 3D Sound in Multimedia Signal ProcessingDocument189 pagesVirtual Acoustics and 3D Sound in Multimedia Signal ProcessingsulicNo ratings yet
- ECE 121L For (MIDTERM EXAM)Document21 pagesECE 121L For (MIDTERM EXAM)Joshua BernardoNo ratings yet
- Introduction To Fuzzy Logic Using MATLAB: S.N. Sivanandam, S. Sumathi and S.N. DeepaDocument5 pagesIntroduction To Fuzzy Logic Using MATLAB: S.N. Sivanandam, S. Sumathi and S.N. DeepaIrwan P Gunawan100% (1)
- PI-200, PI-400, PI-750, XI41B: Models / ModelosDocument31 pagesPI-200, PI-400, PI-750, XI41B: Models / ModelosRolando MaasNo ratings yet
- 43.1 Description of Flash Code 43: Ddec Iii/Iv Single Ecm Troubleshooting GuideDocument4 pages43.1 Description of Flash Code 43: Ddec Iii/Iv Single Ecm Troubleshooting GuideMarco Antonio Rubiano GómezNo ratings yet
- Administrator & Helpdesk Interview Questions You'll Most Likely Be AskedDocument19 pagesAdministrator & Helpdesk Interview Questions You'll Most Likely Be AskedVibrant Publishers100% (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusFrom EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusRating: 4.5 out of 5 stars4.5/5 (2)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeRating: 5 out of 5 stars5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- Geometric Patterns from Patchwork Quilts: And how to draw themFrom EverandGeometric Patterns from Patchwork Quilts: And how to draw themRating: 5 out of 5 stars5/5 (1)
- Classroom-Ready Number Talks for Third, Fourth and Fifth Grade Teachers: 1,000 Interactive Math Activities that Promote Conceptual Understanding and Computational FluencyFrom EverandClassroom-Ready Number Talks for Third, Fourth and Fifth Grade Teachers: 1,000 Interactive Math Activities that Promote Conceptual Understanding and Computational FluencyNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)