You might also like
- Analog To Digital ConverterDocument4 pagesAnalog To Digital Convertermuzamiru Kahise sayumweNo ratings yet
- Basics of Analog-To-digital ConvertionDocument9 pagesBasics of Analog-To-digital ConvertionThanh Nhan LeNo ratings yet
- AN748Document15 pagesAN748Trenton Astley IslaNo ratings yet
- Introduction To Analog To Digital Converters (ADC)Document9 pagesIntroduction To Analog To Digital Converters (ADC)diether.gozumNo ratings yet
- INLdnlDocument9 pagesINLdnlFlamank FlamankNo ratings yet
- Dec Exp 6 Student ManualDocument5 pagesDec Exp 6 Student ManualSakib MahmudNo ratings yet
- Analog To Digital ConvertersDocument11 pagesAnalog To Digital Convertersمحمد ماجدNo ratings yet
- ADCDocument14 pagesADClalukrNo ratings yet
- CD-29-Doc Design and Simulation of Successive Approximation Adc in VerilogDocument56 pagesCD-29-Doc Design and Simulation of Successive Approximation Adc in VerilogDeepak SalianNo ratings yet
- Analog To Digital Converters (ADC) : A Literature Review: and Sanjeet K. SinhaDocument9 pagesAnalog To Digital Converters (ADC) : A Literature Review: and Sanjeet K. SinhaRyu- MikaNo ratings yet
- A 12-Bit SAR ADC With A DAC-Configurable Window Switching SchemeDocument11 pagesA 12-Bit SAR ADC With A DAC-Configurable Window Switching SchemeSilpa VelagaletiNo ratings yet
- A Low-Cost On-Chip Built-In Self-Test Solution ForDocument12 pagesA Low-Cost On-Chip Built-In Self-Test Solution ForMohammed MohammedaliNo ratings yet
- DLC Lab - 10Document7 pagesDLC Lab - 10Didarul Alam AlifNo ratings yet
- Analog To Digital Converter - Block Diagram, Types Its ApplicationsDocument10 pagesAnalog To Digital Converter - Block Diagram, Types Its ApplicationsNikka Hernandez FloresNo ratings yet
- 12EC62R20 Ramesh SynopsisDocument9 pages12EC62R20 Ramesh Synopsisprasad72207No ratings yet
- 16900121194Document4 pages16900121194suvamsarma67No ratings yet
- ABC of ADCs ErrorsDocument15 pagesABC of ADCs ErrorsKarlNo ratings yet
- 5.g 133 - Efficient Fault Effect Extraction For An IntegratedDocument4 pages5.g 133 - Efficient Fault Effect Extraction For An IntegratedVančo LitovskiNo ratings yet
- AnalogPrecisionMeasurements DOC 95011Document19 pagesAnalogPrecisionMeasurements DOC 95011upali01No ratings yet
- Design and Simulation of 4-Bit Flash Analog to Digital Converter for SpeedDocument7 pagesDesign and Simulation of 4-Bit Flash Analog to Digital Converter for SpeedAlisha KshetriNo ratings yet
- Chapter 5 A D and D 23232Document7 pagesChapter 5 A D and D 23232juber mullaNo ratings yet
- AN12217 - S32K1xx ADC Guidelines, Spec andDocument26 pagesAN12217 - S32K1xx ADC Guidelines, Spec andNguyễn Mỹ KiênNo ratings yet
- ADC - Accuracy Part 1 - Is Accuracy Different From ResolutionDocument4 pagesADC - Accuracy Part 1 - Is Accuracy Different From Resolutionabhishek2138No ratings yet
- ADC Guide, Part 1: The Ideal ADC: Sachin Gupta and Akshay Phatak, Cypress Semiconductor CorpDocument6 pagesADC Guide, Part 1: The Ideal ADC: Sachin Gupta and Akshay Phatak, Cypress Semiconductor CorpBhai BaiNo ratings yet
- Design of A New 3 Bit Flash Analog To DiDocument11 pagesDesign of A New 3 Bit Flash Analog To DisayemeeceNo ratings yet
- Modeling of Sigma Delta Modulator Non Idealities With Two Step Quantization in MATLAB SIMULINK PDFDocument6 pagesModeling of Sigma Delta Modulator Non Idealities With Two Step Quantization in MATLAB SIMULINK PDFeditor_ijcatNo ratings yet
- A Practical Self Calibration Scheme Impl20160413 27420 15b36o6 With Cover Page v2Document10 pagesA Practical Self Calibration Scheme Impl20160413 27420 15b36o6 With Cover Page v2MohammadNo ratings yet
- Analog-Digital Converters: Types, Characteristics and ApplicationsDocument62 pagesAnalog-Digital Converters: Types, Characteristics and Applicationsparth bhardwajNo ratings yet
- DLC LAB - 10 - Student - ManualDocument8 pagesDLC LAB - 10 - Student - ManualImtiaj SajinNo ratings yet
- Design Implementation and Analysis of Flash Adc Architecture WitDocument7 pagesDesign Implementation and Analysis of Flash Adc Architecture WitsayemeeceNo ratings yet
- Digital to analog converters: fabrication and applicationsDocument10 pagesDigital to analog converters: fabrication and applicationsAşšAśsins BRošNo ratings yet
- ADC Guide, Part 1: The Ideal ADC: Sachin Gupta and Akshay Phatak, Cypress Semiconductor CorpDocument6 pagesADC Guide, Part 1: The Ideal ADC: Sachin Gupta and Akshay Phatak, Cypress Semiconductor Corpsunny007_mNo ratings yet
- An5250 PDFDocument20 pagesAn5250 PDFAENo ratings yet
- Multigigabit BottleneckDocument6 pagesMultigigabit BottleneckRomualdo Begale PrudêncioNo ratings yet
- Lab Manual DAC-SignedDocument10 pagesLab Manual DAC-Signedabidrk_21789100% (2)
- Jadavpur University: PptonDocument39 pagesJadavpur University: PptonAmit BarNo ratings yet
- FTADCDocument6 pagesFTADCsaravanany5kNo ratings yet
- Electronics: A Low-Power Column-Parallel Gain-Adaptive Single-Slope ADC For CMOS Image SensorsDocument21 pagesElectronics: A Low-Power Column-Parallel Gain-Adaptive Single-Slope ADC For CMOS Image SensorsShehab BahaaNo ratings yet
- REPORTFINALDocument21 pagesREPORTFINALReal HumanityNo ratings yet
- Ciec 2014 6959082Document5 pagesCiec 2014 6959082SounakDuttaNo ratings yet
- How Analog-To-Digital Converters (ADCs) WorkDocument6 pagesHow Analog-To-Digital Converters (ADCs) Workdiether.gozumNo ratings yet
- Adc F09Document61 pagesAdc F09abdala67No ratings yet
- JTD - 2C - 13 - Delta ModulationDocument11 pagesJTD - 2C - 13 - Delta Modulationhillyatul auliaNo ratings yet
- A D ConverterDocument20 pagesA D ConverterRenu TyagiNo ratings yet
- Department of Mechanical Engineering Shri Ramdeobaba College of Engineering and Management, NagpurDocument28 pagesDepartment of Mechanical Engineering Shri Ramdeobaba College of Engineering and Management, Nagpursangeet khuleNo ratings yet
- Dac Interface To 8051 PDFDocument4 pagesDac Interface To 8051 PDFRAVI100% (1)
- Adc 1704389539Document3 pagesAdc 1704389539Shubham JaiswalNo ratings yet
- Low Voltage CMOS SAR ADC DesignDocument68 pagesLow Voltage CMOS SAR ADC DesignAyush SukaniNo ratings yet
- ADC DAC Loopback LinearityDocument15 pagesADC DAC Loopback LinearityparrotpanduNo ratings yet
- Jadavpur University PPT on ADC: Workings & ApplicationsDocument35 pagesJadavpur University PPT on ADC: Workings & ApplicationsAmit BarNo ratings yet
- (Model No:VBMB - 002) : 8-Bit Digital To Analog Converter Interface BoardDocument56 pages(Model No:VBMB - 002) : 8-Bit Digital To Analog Converter Interface BoardSanthanu Surendran100% (1)
- DEC LAB REPORT-06Document9 pagesDEC LAB REPORT-06anon_776365175No ratings yet
- Lab 10Document6 pagesLab 10Nouroj AminNo ratings yet
- The ABCs of ADCs - Understan..Document12 pagesThe ABCs of ADCs - Understan..votasugs756No ratings yet
- A Digital Background Technique For Pipelined Analog-to-Digital ConvertersDocument5 pagesA Digital Background Technique For Pipelined Analog-to-Digital ConverterskennyNo ratings yet
- Design of Low Power 4-Bit Flash ADC Based On Standard Cells: Marcel Siadjine Njinowa, Hung Tien Bui François-Raymond BoyerDocument4 pagesDesign of Low Power 4-Bit Flash ADC Based On Standard Cells: Marcel Siadjine Njinowa, Hung Tien Bui François-Raymond BoyerSunil PandeyNo ratings yet
- Adc 26.12.22Document38 pagesAdc 26.12.22Mrs.S.Divya BMENo ratings yet
- Communications Lab. Experiment 6: Adc / DacDocument2 pagesCommunications Lab. Experiment 6: Adc / DacSenthil KumarNo ratings yet
- Class Notes - ADC for Numerical RelayDocument5 pagesClass Notes - ADC for Numerical RelaybiswajitsahooNo ratings yet
- Optimized Hybrid Phase Disposition PWM Control Method For Multilevel InverterDocument5 pagesOptimized Hybrid Phase Disposition PWM Control Method For Multilevel Inverterதமிழன்No ratings yet
- p347 PDFDocument16 pagesp347 PDFதமிழன்No ratings yet
- Ee2403 Sem 2 MarksDocument15 pagesEe2403 Sem 2 MarksBala SubramanianNo ratings yet
- Different Power Supplies For Different Machines: H.-J. EckoldtDocument20 pagesDifferent Power Supplies For Different Machines: H.-J. Eckoldtதமிழன்No ratings yet
- Validation of a 60-Level Modular Multilevel Converter ModelDocument6 pagesValidation of a 60-Level Modular Multilevel Converter Modelதமிழன்No ratings yet
- Hybrid GridDocument11 pagesHybrid Gridதமிழன்No ratings yet
- Special Electrical Machines PDFDocument151 pagesSpecial Electrical Machines PDFlaxmandasriNo ratings yet
- PSPWMDocument29 pagesPSPWMSrinivas SirimullaNo ratings yet
- Steuer 2016Document10 pagesSteuer 2016தமிழன்No ratings yet
- Hagiwara2009 PDFDocument10 pagesHagiwara2009 PDFதமிழன்No ratings yet
- IIT Hyderabad PhD Admissions Sample Question PaperDocument2 pagesIIT Hyderabad PhD Admissions Sample Question PaperabNo ratings yet
- Wegecm 02Document10 pagesWegecm 02Shihab MonNo ratings yet
- p185 PDFDocument24 pagesp185 PDFதமிழன்No ratings yet
- A Study of 4D Printing andDocument13 pagesA Study of 4D Printing andதமிழன்No ratings yet
- Current Status of 4D Printing Technology and TheDocument15 pagesCurrent Status of 4D Printing Technology and Theதமிழன்No ratings yet
- CE6451Document6 pagesCE6451தமிழன்No ratings yet
- Wind-Driven Pyroelectric Energy Harvesting DeviceDocument9 pagesWind-Driven Pyroelectric Energy Harvesting Deviceதமிழன்No ratings yet
- XRDDocument19 pagesXRDதமிழன்No ratings yet
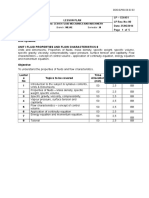
- Fluid Mechanics Lesson PlanDocument6 pagesFluid Mechanics Lesson Planதமிழன்No ratings yet
- Metrology SlidesDocument39 pagesMetrology Slidesதமிழன்No ratings yet
- Selecting and Constructing Data Collection Instruments: IpdetDocument59 pagesSelecting and Constructing Data Collection Instruments: Ipdetதமிழன்No ratings yet
- Research ReportDocument2 pagesResearch ReportadipjksNo ratings yet
- Resizing Images To Match Photo Frame Sizes: The Original ImageDocument13 pagesResizing Images To Match Photo Frame Sizes: The Original ImageRitika DhawanNo ratings yet
- CS201 Computer Programming 1 Lab Exercise 004Document2 pagesCS201 Computer Programming 1 Lab Exercise 004Pauline Karen Macaisa-ConcepcionNo ratings yet
- History of Operating SystemsDocument7 pagesHistory of Operating Systemsakhan10200No ratings yet
- Appen Resume 2Document1 pageAppen Resume 2Veronica Folkedahl100% (1)
- Using The Serial Port With A MATLAB GUIDocument34 pagesUsing The Serial Port With A MATLAB GUIJeya RamanNo ratings yet
- Log 1507548350Document80 pagesLog 1507548350MimiNo ratings yet
- On Digital JewelleryDocument11 pagesOn Digital JewelleryMahesh NidumoluNo ratings yet
- SoftwareDocument330 pagesSoftwareinformasi_mucilNo ratings yet
- Tutorial 9Document4 pagesTutorial 9Matthew SumNo ratings yet
- Mini Project on Web DevelopmentDocument17 pagesMini Project on Web Developmentjaggu verma100% (4)
- Top 20 CCNA Interview Questions and AnswersDocument4 pagesTop 20 CCNA Interview Questions and Answerstaha aliNo ratings yet
- F04 Checklist of Tools, Equipment, Supplies and Materials, and Facilities NEW FORM CSSDocument13 pagesF04 Checklist of Tools, Equipment, Supplies and Materials, and Facilities NEW FORM CSSgillian marbebe100% (1)
- OS TotalDocument50 pagesOS TotalHarisson Pham100% (1)
- Mic 8051Document1 pageMic 8051DaisyQueenNo ratings yet
- Zimbra MigrationWizard For ExchangeDocument24 pagesZimbra MigrationWizard For ExchangeКирилПановNo ratings yet
- Introduction To Graphics and MultimediaDocument47 pagesIntroduction To Graphics and MultimediafeisalNo ratings yet
- 25 Log Files That Will Transform Your VSphere TroubleshootingDocument9 pages25 Log Files That Will Transform Your VSphere TroubleshootingRudra VmwareNo ratings yet
- ZXSDR UniRAN V3!10!20 FDD LTE Base Station Radio Parameter ReferenceDocument182 pagesZXSDR UniRAN V3!10!20 FDD LTE Base Station Radio Parameter ReferenceAli SahalNo ratings yet
- 5 - VoIP Debug CommandsDocument14 pages5 - VoIP Debug Commandsapi-19663123No ratings yet
- KD50015 eDocument575 pagesKD50015 eOrlando Barreto100% (1)
- Open LVDS Display InterfaceDocument45 pagesOpen LVDS Display InterfaceMilan NikolićNo ratings yet
- Question Paper VlsiDocument2 pagesQuestion Paper VlsiH&P GamingNo ratings yet
- The 74LS245 Buffer ChipDocument3 pagesThe 74LS245 Buffer ChipShreerama Samartha G BhattaNo ratings yet
- QuantizationDocument89 pagesQuantizationannanndhiii100% (1)
- QR Code Based Toll Gate Accessing System Reducing ManpowerDocument3 pagesQR Code Based Toll Gate Accessing System Reducing ManpowerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cadence EDI System What's New 12.0 PDFDocument130 pagesCadence EDI System What's New 12.0 PDFStudentNo ratings yet
- Zigbee Based Heartbeat Rate Monitoring SystemDocument6 pagesZigbee Based Heartbeat Rate Monitoring SystemTabithaDsouzaNo ratings yet
- BMS - Barcovision Textile Machine Monitoring QualiMasterDocument3 pagesBMS - Barcovision Textile Machine Monitoring QualiMasterSarvadaman MajmundarNo ratings yet
- HDWriterAE (5 3L019) - ManualDocument173 pagesHDWriterAE (5 3L019) - ManualzeljavalybiNo ratings yet
- K21 Academy Oracle AppsDBA 10 Upgrade DocsDocument17 pagesK21 Academy Oracle AppsDBA 10 Upgrade DocsRa12appsNo ratings yet