You might also like
- Energies: Dynamic Analysis of Wind Turbine Gearbox ComponentsDocument18 pagesEnergies: Dynamic Analysis of Wind Turbine Gearbox Componentsmohammed khadrNo ratings yet
- Energies 13 02108Document21 pagesEnergies 13 02108eqNo ratings yet
- Finite Element Structural Analysis of Wind Turbine Gearbox ConsideringDocument7 pagesFinite Element Structural Analysis of Wind Turbine Gearbox Consideringashok_abclNo ratings yet
- InTech-Wind Turbine Gearbox TechnologiesDocument18 pagesInTech-Wind Turbine Gearbox TechnologieshamdimouhhiNo ratings yet
- LISPEN_ECM_2023_AMORETTIDocument34 pagesLISPEN_ECM_2023_AMORETTIcepheid_luNo ratings yet
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- Resistencia de MaterialesDocument11 pagesResistencia de MaterialesMikel1020No ratings yet
- Wind Turbine Gearbox Technologies: April 2010Document19 pagesWind Turbine Gearbox Technologies: April 2010Adarsh ShindeNo ratings yet
- Structural analysis of a wind turbine drive train using flexible multibody simulationDocument16 pagesStructural analysis of a wind turbine drive train using flexible multibody simulationrachitmatNo ratings yet
- machines-12-00227-v2Document23 pagesmachines-12-00227-v2Etienne UiSNo ratings yet
- Energies 06 02741 PDFDocument18 pagesEnergies 06 02741 PDFnicos1No ratings yet
- есть данные комбайнаDocument19 pagesесть данные комбайнаdimaNo ratings yet
- Stiffness of GearDocument14 pagesStiffness of GearShivkant SharmaNo ratings yet
- Research Article: Explicit Nonlinear Finite Element Geometric Analysis of Parabolic Leaf Springs Under Various LoadsDocument12 pagesResearch Article: Explicit Nonlinear Finite Element Geometric Analysis of Parabolic Leaf Springs Under Various LoadsraajaahNo ratings yet
- Article Vilebrequin F8L413Document12 pagesArticle Vilebrequin F8L413Maarten BaanNo ratings yet
- Dynamic Load and Stress Analyis of CrankshaftDocument8 pagesDynamic Load and Stress Analyis of Crankshaftsathya_rangaNo ratings yet
- Rolling Element Bearing and Squeeze Film Damper DynamicsDocument14 pagesRolling Element Bearing and Squeeze Film Damper DynamicsRonald GeorgeNo ratings yet
- Analysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGDocument5 pagesAnalysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGThaiHuynhNgocNo ratings yet
- A Study On The Dynamic Analysis Modelling For High-Speed Roller BearingsDocument10 pagesA Study On The Dynamic Analysis Modelling For High-Speed Roller BearingsRCUNo ratings yet
- Jurnal V-Belt Rafa Pradipta 9122015Document8 pagesJurnal V-Belt Rafa Pradipta 9122015afdhdan winataNo ratings yet
- Influence of Thrust Bearings in Lateral VibrationDocument13 pagesInfluence of Thrust Bearings in Lateral VibrationHuang XiaodianNo ratings yet
- Energy: Abbas Ebrahimi, Mahmood SekandariDocument15 pagesEnergy: Abbas Ebrahimi, Mahmood Sekandarimohdsolihat1No ratings yet
- Paper Rotor DynamicsDocument12 pagesPaper Rotor DynamicsTony HeNo ratings yet
- A Mechatronic Approach For Anti-Slip Control in Railway TractionDocument6 pagesA Mechatronic Approach For Anti-Slip Control in Railway TractionLoftie DeyzelNo ratings yet
- D 012222333Document11 pagesD 012222333IOSRjournalNo ratings yet
- A Novel Power Splitting Drive Train For Variable Speed Wind Power GeneratorsDocument11 pagesA Novel Power Splitting Drive Train For Variable Speed Wind Power GeneratorsDork654651No ratings yet
- Design and Implementation of A Controllable ModelDocument11 pagesDesign and Implementation of A Controllable ModelNour3' 'No ratings yet
- GL Offshore Wind Turbine Jacket Design PaperDocument8 pagesGL Offshore Wind Turbine Jacket Design PaperJolly JackNo ratings yet
- Research Article: Dynamic Characteristics of Air Cycle Machine Rotor SystemDocument17 pagesResearch Article: Dynamic Characteristics of Air Cycle Machine Rotor SystemEmandi RajeshNo ratings yet
- Assessment of Dynamic Parameters of Heavy-Duty GearsDocument6 pagesAssessment of Dynamic Parameters of Heavy-Duty GearsMohammad HosseiniNo ratings yet
- Crank Shaft Full ReportDocument77 pagesCrank Shaft Full ReportpramodassNo ratings yet
- Longitudinal Vehicle Dynamics Using Simulink/Matlab: January 2010Document7 pagesLongitudinal Vehicle Dynamics Using Simulink/Matlab: January 2010Helen IkedaNo ratings yet
- Analysis of The Furling Behavior of Small Wind Turbines 2010 Applied EnergyDocument15 pagesAnalysis of The Furling Behavior of Small Wind Turbines 2010 Applied EnergygeoNo ratings yet
- Rotor Dynamics of Aircraft Gas Turbine EnginesDocument5 pagesRotor Dynamics of Aircraft Gas Turbine EnginesfengrotorNo ratings yet
- Study and Analysis of Stress and Pressure Variations On Indian Railway WheelDocument7 pagesStudy and Analysis of Stress and Pressure Variations On Indian Railway WheelBoussalia LatifaNo ratings yet
- Wind Turbine Seismic Load Analysis Based On Numerical CalculationDocument10 pagesWind Turbine Seismic Load Analysis Based On Numerical CalculationYasin ÖzenNo ratings yet
- Crank ShaftDocument49 pagesCrank Shaftpramo_dassNo ratings yet
- Structural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightDocument20 pagesStructural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightNasser ShelilNo ratings yet
- Important Short Questions DYNAMICS AND DESIGN OF MACHINERYDocument32 pagesImportant Short Questions DYNAMICS AND DESIGN OF MACHINERYramos mingoNo ratings yet
- Research Article: Crankshaft Optimization Based On Experimental Design and Response Surface MethodDocument15 pagesResearch Article: Crankshaft Optimization Based On Experimental Design and Response Surface MethodAmine EL FERHANINo ratings yet
- Planetary Bearing Load Comparison in Wind Turbine GearboxesDocument20 pagesPlanetary Bearing Load Comparison in Wind Turbine GearboxesMikel1020No ratings yet
- AMME2500 Assignment 3Document12 pagesAMME2500 Assignment 3Drago6678No ratings yet
- A Textbook of Machine Design by R.S.khurMI and J.K.guptADocument17 pagesA Textbook of Machine Design by R.S.khurMI and J.K.guptAVikas SharmaNo ratings yet
- Integrated Load and Strength Analysis For Offshore Wind Turbines With Jacket StructuresDocument8 pagesIntegrated Load and Strength Analysis For Offshore Wind Turbines With Jacket StructuresChunhong ZhaoNo ratings yet
- About The Preliminary Design of The Suspension SPRDocument7 pagesAbout The Preliminary Design of The Suspension SPRalinNo ratings yet
- Yawing Dynamics Optimization of Wind TurbinesDocument9 pagesYawing Dynamics Optimization of Wind TurbinesRevan TaeNo ratings yet
- Towards Rotordynamic Analysis With COMSOL Multiphysics Towards Rotordynamic Analysis With COMSOL MultiphysicsDocument5 pagesTowards Rotordynamic Analysis With COMSOL Multiphysics Towards Rotordynamic Analysis With COMSOL MultiphysicsjaypallaNo ratings yet
- Modeling of Wind Turbine Gearbox Mounting: Morten Haastrup Michael R. Hansen Morten K. EbbesenDocument9 pagesModeling of Wind Turbine Gearbox Mounting: Morten Haastrup Michael R. Hansen Morten K. Ebbesendiyako dadkhahNo ratings yet
- Research ArticleDocument13 pagesResearch Articlesuman_tkgtppNo ratings yet
- Flywheel Batteries for Vehicles: Energy StorageDocument3 pagesFlywheel Batteries for Vehicles: Energy StorageLalith KrishnanNo ratings yet
- Design of Flywheel RotorsDocument3 pagesDesign of Flywheel RotorskhayatNo ratings yet
- Energies: Performance Analysis and Structure Optimization of A Nautilus Isometric Spiral Wind TurbineDocument20 pagesEnergies: Performance Analysis and Structure Optimization of A Nautilus Isometric Spiral Wind TurbineftahNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Document15 pagesTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spNo ratings yet
- Effect Analysis of Friction and Damping On Anti-Backlash Gear Based On Dynamics Model With Time-Varying Mesh StiffnessDocument11 pagesEffect Analysis of Friction and Damping On Anti-Backlash Gear Based On Dynamics Model With Time-Varying Mesh StiffnessSantiago F.No ratings yet
- Wevj 10 00009 v2 PDFDocument16 pagesWevj 10 00009 v2 PDFFethi ben mebarekNo ratings yet
- Train Coupler Longitudinal Effect 13Document22 pagesTrain Coupler Longitudinal Effect 13Chuck LiddellNo ratings yet
- 2010-Fan C.C-Fluid ind Inst elim of Rot-b sys with EM exciter-Intl JMSDocument9 pages2010-Fan C.C-Fluid ind Inst elim of Rot-b sys with EM exciter-Intl JMSAlex CooperNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- NCERT Class 11 Geography Part 1 PDFDocument146 pagesNCERT Class 11 Geography Part 1 PDFGayatri ChNo ratings yet
- Sensitivity Analysis of Natural Frequency For Gear Driven System of Wind TurbineDocument4 pagesSensitivity Analysis of Natural Frequency For Gear Driven System of Wind TurbineGayatri ChNo ratings yet
- NCERT Class 11 Geography Part 2 PDFDocument102 pagesNCERT Class 11 Geography Part 2 PDFGayatri ChNo ratings yet
- ILP 2018 Indian Climate and Monsoon PDFDocument29 pagesILP 2018 Indian Climate and Monsoon PDFGayatri ChNo ratings yet
- IEC Wind Turbine Standards PDFDocument8 pagesIEC Wind Turbine Standards PDFGayatri ChNo ratings yet
- Spectral KurtosisDocument26 pagesSpectral KurtosisGayatri ChNo ratings yet
- 7Document16 pages7Gayatri ChNo ratings yet
- Wind Turbine ComponetsDocument10 pagesWind Turbine ComponetsGayatri ChNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Gear Train NewDocument108 pagesGear Train NewArchana MaskeNo ratings yet
- ACE Engineering Academy provides comprehensive mechanical engineering coachingDocument72 pagesACE Engineering Academy provides comprehensive mechanical engineering coachingRanga SriNo ratings yet
- Bowex Spojnice Tip m24Document16 pagesBowex Spojnice Tip m24МиланNo ratings yet
- SEWDocument76 pagesSEWCasHeerNo ratings yet
- Gear Windage: A Review: Carol N. EastwickDocument6 pagesGear Windage: A Review: Carol N. EastwickR Prabhu SekarNo ratings yet
- ME3491 Course PlanDocument9 pagesME3491 Course Planmanoj1316kumar_63152No ratings yet
- Meeka Brochure HoistDocument16 pagesMeeka Brochure HoistMeeka Machinery Pvt. Ltd.No ratings yet
- Abs Landing Gear Guide2Document60 pagesAbs Landing Gear Guide2Fayçal MahieddineNo ratings yet
- 75306RR Eng 2012 - 12 Repair ManualDocument204 pages75306RR Eng 2012 - 12 Repair ManualRC Perumal100% (1)
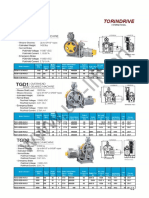
- Torin Drive ManualDocument9 pagesTorin Drive ManualRebecca DangNo ratings yet
- DMM-2 3 1 Q&aDocument6 pagesDMM-2 3 1 Q&aAnand vinayNo ratings yet
- Kluber Centoplex GL 500 PDFDocument1 pageKluber Centoplex GL 500 PDFJorgeAndrésOrtegaBerríosNo ratings yet
- Gear CalculationsDocument14 pagesGear CalculationsBabette FreyNo ratings yet
- Gears: Ken Youssefi Mechanical Engineering DeptDocument19 pagesGears: Ken Youssefi Mechanical Engineering DeptRaghavendra PrasadNo ratings yet
- Major Overhaul Procedure Chart (Using Remanufactured Components)Document2 pagesMajor Overhaul Procedure Chart (Using Remanufactured Components)carlos gallego100% (1)
- LTM1200 en PDFDocument10 pagesLTM1200 en PDFdepi_rachmanNo ratings yet
- CBS-880 Instruction Manual 2013 DougCareDocument39 pagesCBS-880 Instruction Manual 2013 DougCareMike PandeyNo ratings yet
- 13 Ways To Kill A Mechanical Seal FINALDocument16 pages13 Ways To Kill A Mechanical Seal FINALRanjit Koshy AlexanderNo ratings yet
- Engine Report Sriwantha PDFDocument14 pagesEngine Report Sriwantha PDFSriwantha HewageNo ratings yet
- Department of Mechanical Engineering National Institute of Technology, Rourkela, Orissa, India-769 008Document1 pageDepartment of Mechanical Engineering National Institute of Technology, Rourkela, Orissa, India-769 008montymilkyNo ratings yet
- Y14 32 1M 1994Document16 pagesY14 32 1M 1994Henry Javier RíosNo ratings yet
- FEM Analysis of Flashless Ring Gear Forging DiesDocument15 pagesFEM Analysis of Flashless Ring Gear Forging Diespedram khazaieNo ratings yet
- Brushless Vexta Motor AXHDocument10 pagesBrushless Vexta Motor AXHChihiya Fitria NurhayatiNo ratings yet
- Shell Omala S2 G150 DatasheetDocument3 pagesShell Omala S2 G150 Datasheetphankhoa83-1No ratings yet
- 3D Modeling of Five Speed Manual Transmission SystemDocument5 pages3D Modeling of Five Speed Manual Transmission SystemNguyenNo ratings yet
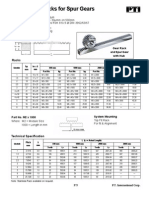
- Metric Gear Racks For Spur GearDocument1 pageMetric Gear Racks For Spur GearMaey AkimNo ratings yet
- AEN Micro ProjectDocument11 pagesAEN Micro Projectvedantbakal043No ratings yet
- Affolter Af90+af45 enDocument2 pagesAffolter Af90+af45 enJayakrishnaNo ratings yet
- Design and Static Analysis of Gearbox For A CNCDocument9 pagesDesign and Static Analysis of Gearbox For A CNCأحمد دعبسNo ratings yet
- Vibration BasicsDocument120 pagesVibration Basicspradeep.selvarajan100% (1)