You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Icf 7 Module First YearDocument180 pagesIcf 7 Module First YearMarvin PanlilioNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Crack Width Design - IS456-2000Document1 pageCrack Width Design - IS456-2000Nitesh SinghNo ratings yet
- Customer Churn Analysis and PredictionDocument4 pagesCustomer Churn Analysis and PredictionATSNo ratings yet
- Disc Brake System ReportDocument20 pagesDisc Brake System ReportGovindaram Rajesh100% (1)
- User's Manual HEIDENHAIN Conversational Format ITNC 530Document747 pagesUser's Manual HEIDENHAIN Conversational Format ITNC 530Mohamed Essam Mohamed100% (2)
- Laboratory Manual: BTY351 Plant Biotechnology LaboratoryDocument40 pagesLaboratory Manual: BTY351 Plant Biotechnology LaboratoryRetik KoulNo ratings yet
- Campus Placement Analyzer: Using Supervised Machine Learning AlgorithmsDocument5 pagesCampus Placement Analyzer: Using Supervised Machine Learning AlgorithmsATSNo ratings yet
- Android-Based High School Management Information SystemDocument5 pagesAndroid-Based High School Management Information SystemATSNo ratings yet
- Wine Quality Prediction Using Machine Learning AlgorithmsDocument4 pagesWine Quality Prediction Using Machine Learning AlgorithmsATS100% (1)
- Search Engine Development To Enhance User CommunicationDocument3 pagesSearch Engine Development To Enhance User CommunicationATSNo ratings yet
- Application of Matrices in Human's LifeDocument6 pagesApplication of Matrices in Human's LifeATSNo ratings yet
- License Plate Detection and Recognition Using OCR Based On Morphological OperationDocument5 pagesLicense Plate Detection and Recognition Using OCR Based On Morphological OperationATSNo ratings yet
- Investigation and Chemical Constituents of MuskmelonsDocument6 pagesInvestigation and Chemical Constituents of MuskmelonsATSNo ratings yet
- Effect of Wind Environment On High Voltage Transmission Lines SpanDocument6 pagesEffect of Wind Environment On High Voltage Transmission Lines SpanATSNo ratings yet
- Modeling and Analysis of Lightning Arrester For Transmission Line Overvoltage ProtectionDocument5 pagesModeling and Analysis of Lightning Arrester For Transmission Line Overvoltage ProtectionATSNo ratings yet
- Electronic Transcript Management SystemDocument5 pagesElectronic Transcript Management SystemATSNo ratings yet
- Air Quality Prediction Using Machine Learning AlgorithmsDocument4 pagesAir Quality Prediction Using Machine Learning AlgorithmsATS100% (1)
- Applications of Machine Learning For Prediction of Liver DiseaseDocument3 pagesApplications of Machine Learning For Prediction of Liver DiseaseATSNo ratings yet
- Restaurants Rating Prediction Using Machine Learning AlgorithmsDocument4 pagesRestaurants Rating Prediction Using Machine Learning AlgorithmsATSNo ratings yet
- Engineering College Admission Preferences Based On Student PerformanceDocument6 pagesEngineering College Admission Preferences Based On Student PerformanceATSNo ratings yet
- A Review of Fuzzy Logic Model For Analysis of Computer Network Quality of ExperienceDocument12 pagesA Review of Fuzzy Logic Model For Analysis of Computer Network Quality of ExperienceATSNo ratings yet
- Expert System For Student Placement PredictionDocument5 pagesExpert System For Student Placement PredictionATSNo ratings yet
- Individual Household Electric Power Consumption Forecasting Using Machine Learning AlgorithmsDocument4 pagesIndividual Household Electric Power Consumption Forecasting Using Machine Learning AlgorithmsATSNo ratings yet
- Website-Based High School Management Information SystemDocument5 pagesWebsite-Based High School Management Information SystemATSNo ratings yet
- Notification Features On Android-Based Job Vacancy Information SystemDocument6 pagesNotification Features On Android-Based Job Vacancy Information SystemATSNo ratings yet
- Design of Microstrip Reflective Array AntennaDocument8 pagesDesign of Microstrip Reflective Array AntennaATSNo ratings yet
- The "Promotion" and "Call For Service" Features in The Android-Based Motorcycle Repair Shop MarketplaceDocument5 pagesThe "Promotion" and "Call For Service" Features in The Android-Based Motorcycle Repair Shop MarketplaceATSNo ratings yet
- Expert System For Problem Solution in Quality Assurance SystemDocument3 pagesExpert System For Problem Solution in Quality Assurance SystemATSNo ratings yet
- Design of Cloud Computing-Based Geographic Information Systems For Mapping Tutoring AgenciesDocument8 pagesDesign of Cloud Computing-Based Geographic Information Systems For Mapping Tutoring AgenciesATSNo ratings yet
- Optimization of Lift Gas Allocation Using Evolutionary AlgorithmsDocument5 pagesOptimization of Lift Gas Allocation Using Evolutionary AlgorithmsATSNo ratings yet
- E-Readiness System E-Government (Case of Communication and Information Office of Badung Regency)Document4 pagesE-Readiness System E-Government (Case of Communication and Information Office of Badung Regency)ATSNo ratings yet
- A Learnability Model For Children Mobile ApplicationsDocument14 pagesA Learnability Model For Children Mobile ApplicationsATSNo ratings yet
- Density Based Traffic Signalling System Using Image ProcessingDocument4 pagesDensity Based Traffic Signalling System Using Image ProcessingATSNo ratings yet
- Frequent Itemset in Sequential Pattern Matching Using BigdataDocument3 pagesFrequent Itemset in Sequential Pattern Matching Using BigdataATSNo ratings yet
- A Model For Code Restructuring, A Tool For Improving Systems Quality in Compliance With Object Oriented Coding PracticeDocument5 pagesA Model For Code Restructuring, A Tool For Improving Systems Quality in Compliance With Object Oriented Coding PracticeATSNo ratings yet
- Review Paper On Distributed ArchitectureDocument28 pagesReview Paper On Distributed ArchitectureWeb GuruNo ratings yet
- Unit-3 BPDocument48 pagesUnit-3 BPShreyas ShreyuNo ratings yet
- F3 Chapter 1 (SOALAN) - RespirationDocument2 pagesF3 Chapter 1 (SOALAN) - Respirationleong cheng liyNo ratings yet
- Factors That Affect College Students' Attitudes Toward MathematicsDocument17 pagesFactors That Affect College Students' Attitudes Toward MathematicsAnthony BernardinoNo ratings yet
- Chap006 - Process Selection & Facility Layout-1Document48 pagesChap006 - Process Selection & Facility Layout-1Ohud AlanaziNo ratings yet
- Articles On SidisDocument146 pagesArticles On SidisMircea492003100% (1)
- SpaceClaim - Developers Guide-5-6Document2 pagesSpaceClaim - Developers Guide-5-6Alexgh1993No ratings yet
- Data Visualization For Python - Sales Retail - r1Document19 pagesData Visualization For Python - Sales Retail - r1Mazhar MahadzirNo ratings yet
- I C Engine LabDocument3 pagesI C Engine LabDevNo ratings yet
- Lab Assignment - 2: CodeDocument8 pagesLab Assignment - 2: CodeKhushal IsraniNo ratings yet
- K20 Engine Control Module X3 (Lt4) Document ID# 4739106Document3 pagesK20 Engine Control Module X3 (Lt4) Document ID# 4739106Data TécnicaNo ratings yet
- Incompressible Flow in Pipe Networks.Document7 pagesIncompressible Flow in Pipe Networks.Ayub Ali WehelieNo ratings yet
- Sap SCM TrainingDocument5 pagesSap SCM TrainingGLOBAL TEQNo ratings yet
- Coek - Info The Fabric of RealityDocument5 pagesCoek - Info The Fabric of RealityFredioGemparAnarqiNo ratings yet
- Gen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Document13 pagesGen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Angeline TumananNo ratings yet
- Class - B Complementary Symmetry Power AmplifierDocument3 pagesClass - B Complementary Symmetry Power AmplifierAnonymous SH0A20No ratings yet
- Which Is The Best Solid Modelling - Dhyan AcademyDocument3 pagesWhich Is The Best Solid Modelling - Dhyan Academydhyanacademy engineersNo ratings yet
- 7PA30121AA000 Datasheet enDocument2 pages7PA30121AA000 Datasheet enMirko DjukanovicNo ratings yet
- Infinera Ds Isfp Timedivision Multiplexing ModulesDocument3 pagesInfinera Ds Isfp Timedivision Multiplexing ModulesAnonymous bpf0OZSd9No ratings yet
- Science BDocument2 pagesScience BIyer JuniorNo ratings yet
- Famous MathematicianDocument116 pagesFamous MathematicianAngelyn MontibolaNo ratings yet
- TE-419891-001 - 862-U-2301 - BIOCIDE DOSING PACKAGE - Rev.BDocument12 pagesTE-419891-001 - 862-U-2301 - BIOCIDE DOSING PACKAGE - Rev.Brizwan.zamanNo ratings yet
- University of Cambridge International Examinations General Certificate of Education Advanced LevelDocument4 pagesUniversity of Cambridge International Examinations General Certificate of Education Advanced LevelHubbak KhanNo ratings yet
- New Features in IbaPDA v7.1.0Document39 pagesNew Features in IbaPDA v7.1.0Miguel Ángel Álvarez VázquezNo ratings yet
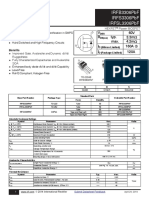
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNo ratings yet