You might also like
- Beam Calculator Online (Calculate The Reactions, Draws Bending Moment, Shear Force, Axial Force)Document4 pagesBeam Calculator Online (Calculate The Reactions, Draws Bending Moment, Shear Force, Axial Force)material manNo ratings yet
- BL Skill CH 3 Notes and TFDocument5 pagesBL Skill CH 3 Notes and TFapi-329922192No ratings yet
- Inter Achieve 2004 Jinkoo (EESD)Document20 pagesInter Achieve 2004 Jinkoo (EESD)bristiNo ratings yet
- Composite StructuresDocument11 pagesComposite StructuresJulianaSatizabalNo ratings yet
- Composite Structures: A. Launay, V. Keryvin, J.-C. Grandidier, P.-Y. Mechin, R. BalzeDocument9 pagesComposite Structures: A. Launay, V. Keryvin, J.-C. Grandidier, P.-Y. Mechin, R. BalzePierre-Yves Harlé-MechinNo ratings yet
- Optimal Topology of Aircraft Rib and Spar Structures Under Aeroelastic LoadsDocument23 pagesOptimal Topology of Aircraft Rib and Spar Structures Under Aeroelastic LoadsAngriot NeanNo ratings yet
- Materials and Design: Umut TopalDocument11 pagesMaterials and Design: Umut TopalPrashant Kumar ChoudharyNo ratings yet
- Optimal Design of Single-Layer Barrel Vault Frames Using Improved Magnetic Charged System SearchDocument26 pagesOptimal Design of Single-Layer Barrel Vault Frames Using Improved Magnetic Charged System SearchAntonio HenryNo ratings yet
- 10.1016 J.sandf.2014.04.015 UanwDocument8 pages10.1016 J.sandf.2014.04.015 Uanwzahra yousefiNo ratings yet
- Nonlinear Analysis of Reinforced Concrete Frames: (Received 25 April 1980)Document5 pagesNonlinear Analysis of Reinforced Concrete Frames: (Received 25 April 1980)juan carlos molano toroNo ratings yet
- A New Procedure For Load Shortening and 2017 International Journal of NavaDocument15 pagesA New Procedure For Load Shortening and 2017 International Journal of NavaTihomir MarkovicNo ratings yet
- Design and Modelling of An Anti-Buckling Compliant Universal Joint With A Compact Configuration - ScienceDirectDocument43 pagesDesign and Modelling of An Anti-Buckling Compliant Universal Joint With A Compact Configuration - ScienceDirectEwerson MatiaNo ratings yet
- 2014 Finite Element Analysis of Machine Foundation Resting On End Bearing PilesDocument22 pages2014 Finite Element Analysis of Machine Foundation Resting On End Bearing PilesBilal LoveNo ratings yet
- 4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsDocument12 pages4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsMayra ZezattiNo ratings yet
- PallDocument11 pagesPallOance Ionut SergiuNo ratings yet
- TA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANDocument11 pagesTA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANhemsladyvsky9164No ratings yet
- A Cyclic-Softening Macro Element Model For Mono-Bucket FoundationsDocument16 pagesA Cyclic-Softening Macro Element Model For Mono-Bucket Foundationsw2gxg558s6No ratings yet
- Stability and Open Loop Dynamics of VeryDocument24 pagesStability and Open Loop Dynamics of VeryRedkit ofFootHillNo ratings yet
- Aeroelastic Analysis and Optimization of High Aspect Ratio Composite Forward Swept WingsDocument9 pagesAeroelastic Analysis and Optimization of High Aspect Ratio Composite Forward Swept Wingszeeshan khanNo ratings yet
- Applied Sciences: Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered BeamsDocument21 pagesApplied Sciences: Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered BeamsHakim HakimNo ratings yet
- Calculation of The Deep Bending Collapse Response For Complex Thin-Walled Columns II. Post-Collapse PhaseDocument34 pagesCalculation of The Deep Bending Collapse Response For Complex Thin-Walled Columns II. Post-Collapse PhaseArya PrihutamaNo ratings yet
- Aero-Structural Blade Design of A High-Power Wind Turbine: Bruno M. Tojo and Andr e C. MartaDocument14 pagesAero-Structural Blade Design of A High-Power Wind Turbine: Bruno M. Tojo and Andr e C. MartaMIGUEL ANGEL DURON SAAVEDRANo ratings yet
- 02 - Optimum Topology Design For The Concentrated Force Diffusion Structure of Strap-On Launch VehicleDocument5 pages02 - Optimum Topology Design For The Concentrated Force Diffusion Structure of Strap-On Launch VehicleKalyude DiógenesNo ratings yet
- Iccste 321Document9 pagesIccste 321abuNo ratings yet
- Ask 21 Flight SimDocument33 pagesAsk 21 Flight Simsovsep100% (1)
- A Micro-Computer Program For The Elastic-Plastic Analysis and Optimum Design of Plane FramesDocument7 pagesA Micro-Computer Program For The Elastic-Plastic Analysis and Optimum Design of Plane Framesjuan carlos molano toroNo ratings yet
- FinalDocument24 pagesFinalApoorvaNo ratings yet
- Computer Pred I CT Ions For Axiaiiy-Loaded Piies With Non I Near SupportsDocument14 pagesComputer Pred I CT Ions For Axiaiiy-Loaded Piies With Non I Near SupportscmkohNo ratings yet
- Determination of The Cross Types To Be Used in A Trailer Chassis by Finite Element MethodDocument9 pagesDetermination of The Cross Types To Be Used in A Trailer Chassis by Finite Element MethodspiritveluNo ratings yet
- Flutter Analysis of Cantilever Composite Plates in SubsonicDocument8 pagesFlutter Analysis of Cantilever Composite Plates in SubsonicArivarasan JCNo ratings yet
- 2016 - Optimal Performance and Sizing of A Battery-Powered AircraftDocument13 pages2016 - Optimal Performance and Sizing of A Battery-Powered Aircraftahmad.yasser123456No ratings yet
- Math Dynamic TireDocument19 pagesMath Dynamic TiresiritapeNo ratings yet
- Equivalent Models of Corrugated Laminates For Morphing Skins - Xia, FriswellDocument10 pagesEquivalent Models of Corrugated Laminates For Morphing Skins - Xia, FriswellLucian GiliaNo ratings yet
- A I C S M B I D S: N Mproved Apacity Pectrum Ethod Ased On Nelastic Emand PectraDocument8 pagesA I C S M B I D S: N Mproved Apacity Pectrum Ethod Ased On Nelastic Emand PectraSuman Narsingh RajbhandariNo ratings yet
- Finite Element Modeling of The Crushing Behavior of TH - 2014 - Composites PartDocument9 pagesFinite Element Modeling of The Crushing Behavior of TH - 2014 - Composites Partsaif ullahNo ratings yet
- Web Compression Buckling Capacity Prediction For Unstiffened I-Sections With Opposite Patch LoadingDocument19 pagesWeb Compression Buckling Capacity Prediction For Unstiffened I-Sections With Opposite Patch LoadingGogyNo ratings yet
- 2020 Optimisation of The Lateral Buckling Strength of Corrugated CompositeDocument16 pages2020 Optimisation of The Lateral Buckling Strength of Corrugated CompositeHussein M. H. Al-KhafajiNo ratings yet
- Lagrangian Mechanics of Motorised Momentum Exchange TethersDocument17 pagesLagrangian Mechanics of Motorised Momentum Exchange TethersLeo KutsNo ratings yet
- Composite Structures: P. Nali, E. Carrera, S. LeccaDocument9 pagesComposite Structures: P. Nali, E. Carrera, S. LeccaRyuk BlackNo ratings yet
- Fasteners Modeling For MSC - Nastran Finite Element Analysis: Alexander Rutman, Adrian ViisoreanuDocument18 pagesFasteners Modeling For MSC - Nastran Finite Element Analysis: Alexander Rutman, Adrian ViisoreanuBatuhan DerNo ratings yet
- Computational Models For The Stress Analysis of Metal Composite Overwrapped Pressure Vessels - Andrey Burov2016Document5 pagesComputational Models For The Stress Analysis of Metal Composite Overwrapped Pressure Vessels - Andrey Burov2016Hiến Đinh VănNo ratings yet
- Numerical Simulation and Structural Optimization Based On An Elliptical and Cylindrical Raft Wave Energy Conversion DeviceDocument22 pagesNumerical Simulation and Structural Optimization Based On An Elliptical and Cylindrical Raft Wave Energy Conversion Device정주호No ratings yet
- 2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMDocument10 pages2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMCristiano BeckNo ratings yet
- Energies 17 00692 v2Document14 pagesEnergies 17 00692 v2uma.bhuvanNo ratings yet
- Comparison of Composite Blade Models: A Coupled-Beam Msc/Nastran Finite-Element ModelDocument16 pagesComparison of Composite Blade Models: A Coupled-Beam Msc/Nastran Finite-Element ModelVijay NidagalkarNo ratings yet
- Tabeshpour A 10 57 1 77f3196Document9 pagesTabeshpour A 10 57 1 77f3196Irfan KhanNo ratings yet
- CFD Analysis of Propeller Performance in Oblique Flow: Giulio Dubbioso, Roberto Muscari, Andrea Di MascioDocument8 pagesCFD Analysis of Propeller Performance in Oblique Flow: Giulio Dubbioso, Roberto Muscari, Andrea Di MascioNoumanNo ratings yet
- Yield and Ultimate Moment and Curvature Closed-Form Equations For Reinforced Concrete SectionsDocument13 pagesYield and Ultimate Moment and Curvature Closed-Form Equations For Reinforced Concrete SectionsDavid LopezNo ratings yet
- TCI092-IASS2023-Full Paper-Pauletti-RochaDocument12 pagesTCI092-IASS2023-Full Paper-Pauletti-RochaRuy Marcelo PaulettiNo ratings yet
- Finite Element Analysis of Ship Structures Using A New Stiffened Plate ElementDocument14 pagesFinite Element Analysis of Ship Structures Using A New Stiffened Plate Elementmilad66teh100% (1)
- Buckling - EquationsDocument66 pagesBuckling - EquationsricardoborNo ratings yet
- Design of Anis Grid Composite Lattice Conical Shell StructuresDocument8 pagesDesign of Anis Grid Composite Lattice Conical Shell StructuresCharyNo ratings yet
- J Matpr 2020 09 215Document5 pagesJ Matpr 2020 09 215assiallawi997No ratings yet
- A Study On The Modeling of A Hexacopter: December 2015Document9 pagesA Study On The Modeling of A Hexacopter: December 2015nkofodileNo ratings yet
- GoizuetaDocument17 pagesGoizuetaGabrielNo ratings yet
- Design of Flywheel RotorsDocument3 pagesDesign of Flywheel RotorskhayatNo ratings yet
- Failure Analysis of Lattice Tower Like StructuresDocument9 pagesFailure Analysis of Lattice Tower Like StructuresFrancisco Javier Torres AlvaradoNo ratings yet
- Engineering Science and Technology, An International JournalDocument11 pagesEngineering Science and Technology, An International JournalLorenzo AltonagaNo ratings yet
- Leaf Springs Design Calculation and TestDocument10 pagesLeaf Springs Design Calculation and TestJorge Leonardo Fonseca DondaNo ratings yet
- Constitutive Model For Full-Range Elasto-Plastic Behavior of Structural Steels With Yield Plateau Formulation (Hu, Et Al. 2016)Document12 pagesConstitutive Model For Full-Range Elasto-Plastic Behavior of Structural Steels With Yield Plateau Formulation (Hu, Et Al. 2016)Jose ManuelNo ratings yet
- Case Studies in Structural Engineering: Jack Bouwkamp, Mohamad Ghasem Vetr, Ali GhamariDocument14 pagesCase Studies in Structural Engineering: Jack Bouwkamp, Mohamad Ghasem Vetr, Ali GhamariJhon Smit Gonzales UscataNo ratings yet
- Non-Linear Structures: Matrix Methods of Analysis and Design by ComputersFrom EverandNon-Linear Structures: Matrix Methods of Analysis and Design by ComputersRating: 4.5 out of 5 stars4.5/5 (2)
- Internet Finite Element ResourcesDocument7 pagesInternet Finite Element Resourcesmaterial manNo ratings yet
- Kuwait University Dept. of Chemical Engineering Spring 2017/2018Document8 pagesKuwait University Dept. of Chemical Engineering Spring 2017/2018material manNo ratings yet
- FEM For Two-Dimensional Solids (Finite Element Method) Part 2Document11 pagesFEM For Two-Dimensional Solids (Finite Element Method) Part 2material manNo ratings yet
- Shaft Design ModelDocument1 pageShaft Design Modelmaterial manNo ratings yet
- Improved Viscoelastic Model For Laminate Composite Under Static and Dynamic LoadingsDocument12 pagesImproved Viscoelastic Model For Laminate Composite Under Static and Dynamic Loadingsmaterial manNo ratings yet
- Internet Finite Element ResourcesDocument7 pagesInternet Finite Element Resourcesmaterial manNo ratings yet
- Shaft DesignDocument1 pageShaft Designmaterial manNo ratings yet
- Hatching in AssemblyDocument1 pageHatching in Assemblymaterial manNo ratings yet
- التفاصيل الكاملة لبرنامج مكافأة تى اى داتا فور يو 4U - كيفيه الحصول على خصومات على الاشتراك - نجوم مصر PDFDocument12 pagesالتفاصيل الكاملة لبرنامج مكافأة تى اى داتا فور يو 4U - كيفيه الحصول على خصومات على الاشتراك - نجوم مصر PDFmaterial manNo ratings yet
- Aisi 1141 Carbon Steel (Uns g11410)Document7 pagesAisi 1141 Carbon Steel (Uns g11410)material manNo ratings yet
- What Is A Flexural Modulus - Definition From CorrosionpediaDocument5 pagesWhat Is A Flexural Modulus - Definition From Corrosionpediamaterial manNo ratings yet
- Aisi 1030 Carbon Steel (Uns g10300)Document9 pagesAisi 1030 Carbon Steel (Uns g10300)material manNo ratings yet
- Sample Midterm Problems - Engineering Graphics in DesignDocument5 pagesSample Midterm Problems - Engineering Graphics in Designmaterial manNo ratings yet
- ShearDocument1 pageShearmaterial manNo ratings yet
- Aisi 4147 Alloy Steel (Uns g41470)Document7 pagesAisi 4147 Alloy Steel (Uns g41470)material manNo ratings yet
- SolvedDocument1 pageSolvedmaterial manNo ratings yet
- 2Document1 page2material manNo ratings yet
- Engineering Drawing 3Document1 pageEngineering Drawing 3material manNo ratings yet
- AutomotiveDocument1 pageAutomotivematerial manNo ratings yet
- CubicDocument1 pageCubicmaterial manNo ratings yet
- Engineering Drawing 5Document1 pageEngineering Drawing 5material manNo ratings yet
- Introduction To Finite Elements - Axial Bar Finite Element Solution - WikiversityDocument9 pagesIntroduction To Finite Elements - Axial Bar Finite Element Solution - Wikiversitymaterial manNo ratings yet
- Engineering Drawing 4Document1 pageEngineering Drawing 4material manNo ratings yet
- lec1اساسيات هندسة التركيبات الصحية PDFDocument46 pageslec1اساسيات هندسة التركيبات الصحية PDFahmedsalemyNo ratings yet
- Case StudyDocument6 pagesCase Studymaterial manNo ratings yet
- Engineering Drawing 1Document1 pageEngineering Drawing 1material manNo ratings yet
- Engineering Drawing 2Document1 pageEngineering Drawing 2material manNo ratings yet
- 71584BDocument23 pages71584Bmaterial manNo ratings yet
- GIS 46-010-New Pressure VesselsDocument87 pagesGIS 46-010-New Pressure VesselsPippo Pippo100% (1)
- Grade 12 Chem Remedial WorksheetDocument4 pagesGrade 12 Chem Remedial Worksheetz82tynq64yNo ratings yet
- WWW NDT Ed OrgDocument2 pagesWWW NDT Ed OrgGuru SamyNo ratings yet
- CompositePro Users GuideDocument146 pagesCompositePro Users GuidebnidhalNo ratings yet
- ClimateDocument8 pagesClimateSujay MalvankarNo ratings yet
- Igf - Fuel Containment System - 5.12.Document9 pagesIgf - Fuel Containment System - 5.12.nipper7No ratings yet
- Normal Modes of Vibration: One-Dimensional Model # 1Document51 pagesNormal Modes of Vibration: One-Dimensional Model # 1Edgar PuenteNo ratings yet
- Simulation of Particle Flows and Breakage in Crushers Using DEM Part 1 - Compression CrushersDocument20 pagesSimulation of Particle Flows and Breakage in Crushers Using DEM Part 1 - Compression Crushersthe requiem LastNo ratings yet
- AHU SpecificationsDocument6 pagesAHU SpecificationsreddyrioNo ratings yet
- Water Jet MachiningDocument20 pagesWater Jet MachiningRazvan MargineanNo ratings yet
- TPFT IG1 Jan 2020 PDFDocument6 pagesTPFT IG1 Jan 2020 PDFrehanNo ratings yet
- TechNote - B008-20-Basic C-Shaped Wall Stud Behavior-WEBFINALDocument6 pagesTechNote - B008-20-Basic C-Shaped Wall Stud Behavior-WEBFINALsahanNo ratings yet
- Time-Varying Load Failures: Piyush ShakyaDocument47 pagesTime-Varying Load Failures: Piyush Shakyaraviraj kumarNo ratings yet
- Heat Ad Mass Transfer in A Cooling Tower With Special Attention To The Tower Characteristic RatioDocument5 pagesHeat Ad Mass Transfer in A Cooling Tower With Special Attention To The Tower Characteristic RatioAathithyayanSoundararajanNo ratings yet
- Heat ExchangerDocument11 pagesHeat ExchangerLouise DimaunahanNo ratings yet
- A Compressor Surge Control System: Combination Active Surge Control System and Surge Avoidance SystemDocument7 pagesA Compressor Surge Control System: Combination Active Surge Control System and Surge Avoidance SystemAbbas MohajerNo ratings yet
- Chemical Reaction Engineering (CRE) Is TheDocument24 pagesChemical Reaction Engineering (CRE) Is TheVaibhav GuptaNo ratings yet
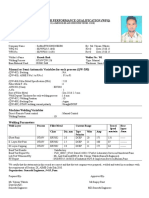
- WPQ Is 2062 Haresh Shah W1Document1 pageWPQ Is 2062 Haresh Shah W1Anand KesarkarNo ratings yet
- HOW TO DESIGN AMMONIA REFRIGERATION PLANT USING AAR STANDARD 1 2016 by Ramesh ParanjpeyDocument7 pagesHOW TO DESIGN AMMONIA REFRIGERATION PLANT USING AAR STANDARD 1 2016 by Ramesh ParanjpeyMark Anthony CentenoNo ratings yet
- 01-07-Wave Making ResistanceDocument47 pages01-07-Wave Making Resistancerahmahmed200kNo ratings yet
- SPH3UExamReview PDFDocument6 pagesSPH3UExamReview PDFshireeceNo ratings yet
- Design and Analysis of Disc Brake System in High Speed VehiclesDocument9 pagesDesign and Analysis of Disc Brake System in High Speed Vehiclessavio pullkotilNo ratings yet
- Mechanics of Solids (CIE 1051) (Makeup)Document5 pagesMechanics of Solids (CIE 1051) (Makeup)Alok KumarNo ratings yet
- Et3034tux Courseware. Question 2.3.1 Al 2.3.3Document3 pagesEt3034tux Courseware. Question 2.3.1 Al 2.3.3Luis EmprendedorNo ratings yet
- Riteflex 640aDocument3 pagesRiteflex 640aazaleaemersonNo ratings yet
- 11.1 Instrumentation and Control ObjectivesDocument3 pages11.1 Instrumentation and Control ObjectivesNoman AslamNo ratings yet
- Journal of Industrial and Engineering Chemistry: Seunghyun Ko, Yeon Ju Kwon, Jea Uk Lee, Young-Pyo JeonDocument10 pagesJournal of Industrial and Engineering Chemistry: Seunghyun Ko, Yeon Ju Kwon, Jea Uk Lee, Young-Pyo Jeonkhalid bouitiNo ratings yet
- Drilling Jar PlacementDocument3 pagesDrilling Jar Placementrdos1467% (3)
- LandauDocument21 pagesLandauLevema SiraNo ratings yet