You might also like
- Scalars, Vectors and Tensors ExplainedDocument12 pagesScalars, Vectors and Tensors ExplainedHamed MemarianNo ratings yet
- 3 - Stress TensorDocument23 pages3 - Stress TensorRishan Joshua DsilvaNo ratings yet
- Fluid Dynamics Lecture Notes: Kinematics of Fluid MotionDocument4 pagesFluid Dynamics Lecture Notes: Kinematics of Fluid MotionAntonio Perez OrtizNo ratings yet
- Full Elementary Aerodynamics Course by MITDocument158 pagesFull Elementary Aerodynamics Course by MIT34plt34No ratings yet
- Entropy Production and Diabatic Term For Single Component FluidDocument8 pagesEntropy Production and Diabatic Term For Single Component Fluidjano_masekNo ratings yet
- Test 1 RevDocument6 pagesTest 1 RevSAYAN BAGCHINo ratings yet
- Differential Equations NoteDocument25 pagesDifferential Equations NoteSumudu DilshanNo ratings yet
- Cuerpo RigidoDocument37 pagesCuerpo RigidoByron AyalaNo ratings yet
- Elasticity Theory BasisDocument9 pagesElasticity Theory BasisGiovanni Morais TeixeiraNo ratings yet
- Design the Bottom Steel PlateDocument7 pagesDesign the Bottom Steel PlateTousif MahmoodNo ratings yet
- Stress-Strain Relationship For A Newtonian Fluid: Ij I JDocument3 pagesStress-Strain Relationship For A Newtonian Fluid: Ij I JMuhammad AamirNo ratings yet
- Lecture - 36: Wave Propagation in Continuum SystemDocument4 pagesLecture - 36: Wave Propagation in Continuum SystemgauthamNo ratings yet
- Relativistic DampingDocument18 pagesRelativistic DampingChrisTselentisNo ratings yet
- Engineering AnalysisDocument11 pagesEngineering AnalysisMhamedNo ratings yet
- bk978 0 7503 1401 5ch1Document19 pagesbk978 0 7503 1401 5ch1Putu IndraNo ratings yet
- Linear elasticity boundary value problemsDocument6 pagesLinear elasticity boundary value problemsSAYEENo ratings yet
- Damped Vibration: Viscous and Coulomb DampingDocument14 pagesDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNo ratings yet
- MDP Module 2Document84 pagesMDP Module 2ADITYA RAJ CHOUDHARYNo ratings yet
- Eerste HoofdstukDocument22 pagesEerste HoofdstukJanit JijiNo ratings yet
- Lecture 3Document15 pagesLecture 3ansgcekNo ratings yet
- SEISMOLOGY, Lecture 2Document38 pagesSEISMOLOGY, Lecture 2Singgih Satrio WibowoNo ratings yet
- The University of Calgary: Schulich School of EngineeringDocument9 pagesThe University of Calgary: Schulich School of EngineeringAzizi3ameelNo ratings yet
- Waves MechanicalDocument81 pagesWaves MechanicalChandrali DasNo ratings yet
- Mechanics quiz forces and motion problemsDocument2 pagesMechanics quiz forces and motion problemsAdam TraoreNo ratings yet
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- ch10 PDFDocument19 pagesch10 PDFJuan Sebastian Olarte UribeNo ratings yet
- CH 10Document19 pagesCH 10Juan Sebastian Olarte UribeNo ratings yet
- Principal StressesDocument15 pagesPrincipal StressesTibebu MerideNo ratings yet
- 1.3 Linear Elasticity: 1.3.1 DeformationsDocument4 pages1.3 Linear Elasticity: 1.3.1 DeformationsKawa Mustafa AzizNo ratings yet
- 17.lecture 27 Finite Element Derivation PDFDocument17 pages17.lecture 27 Finite Element Derivation PDFKarina NaudéNo ratings yet
- Mathcad - Young 2.mcd PDFDocument4 pagesMathcad - Young 2.mcd PDFrobertobaggio9No ratings yet
- Classical Mechanics NotesDocument54 pagesClassical Mechanics NotesAmichai LevyNo ratings yet
- W W V V : Topic IntroductionDocument2 pagesW W V V : Topic Introductionarcee.sevenNo ratings yet
- Mechanical Component Failure Theories ExplainedDocument39 pagesMechanical Component Failure Theories Explainedmarwan alobaidiNo ratings yet
- Solving Problems by Indefinite IntegrationDocument8 pagesSolving Problems by Indefinite IntegrationMary Joy BalaisNo ratings yet
- ME338A Continuum Mechanics Lecture Notes on Volumetric-Deviatoric Stress DecompositionDocument9 pagesME338A Continuum Mechanics Lecture Notes on Volumetric-Deviatoric Stress DecompositionSüleyman TüreNo ratings yet
- Chap6 BeamdeflectionDocument34 pagesChap6 BeamdeflectionMark Lester AndayaNo ratings yet
- A Mixed-Enhanced Formulation For Tetrahedral Finite ElementsDocument24 pagesA Mixed-Enhanced Formulation For Tetrahedral Finite ElementsAlfito Januar HNo ratings yet
- Selected Exercises From Susskind's General Relativity (TTM4)Document14 pagesSelected Exercises From Susskind's General Relativity (TTM4)Pier Franco NaliNo ratings yet
- ABAQUS Implementation of Isotropic Power-Law Hardening PlasticityDocument11 pagesABAQUS Implementation of Isotropic Power-Law Hardening PlasticitycsmanienNo ratings yet
- Approximation Methods in Quantum MechanicsDocument10 pagesApproximation Methods in Quantum MechanicsJohn100% (1)
- Sdof DynDocument29 pagesSdof DynAnkur KurmiNo ratings yet
- Energy method solutionsDocument25 pagesEnergy method solutionsArnab PaulNo ratings yet
- 1_2_SeparateVariablesDocument13 pages1_2_SeparateVariablesMuavha MadembeNo ratings yet
- The Integrating Factor Method (Sect. 1.1) : Constant Coefficients. The Initial Value ProblemDocument9 pagesThe Integrating Factor Method (Sect. 1.1) : Constant Coefficients. The Initial Value ProblemMohamed MenaaNo ratings yet
- Kinetics of A Particle: Impulse and Momentum (I) : by Dr. Toh Hoong ThiamDocument24 pagesKinetics of A Particle: Impulse and Momentum (I) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Von Mises Yield CriterionDocument4 pagesVon Mises Yield CriterionJanatan ChoiNo ratings yet
- Lec Week3asfasdfasdfDocument3 pagesLec Week3asfasdfasdfShahimulk KhattakNo ratings yet
- University of British Columbia - St. Venant TorsionDocument15 pagesUniversity of British Columbia - St. Venant TorsionFrancisco ContrerasNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTheypartygirlNo ratings yet
- 5 - Tensor Notation (Advanced)Document9 pages5 - Tensor Notation (Advanced)panquanNo ratings yet
- A Numerical Example: SolutionDocument6 pagesA Numerical Example: Solutionreza2224No ratings yet
- Numerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeDocument9 pagesNumerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeVe LopiNo ratings yet
- Tesch - On Invariants of Fluid Mechanics TensorsDocument8 pagesTesch - On Invariants of Fluid Mechanics TensorsSandeepNo ratings yet
- Chapter 2 ProblemssDocument91 pagesChapter 2 Problemssarsovamaya1No ratings yet
- Chapter 2 ProblemsssDocument104 pagesChapter 2 Problemsssarsovamaya1No ratings yet
- Mechanics of SolidsDocument10 pagesMechanics of SolidsAnshuman SinghNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Summary17 PDFDocument1 pageSummary17 PDFDilip KumarNo ratings yet
- Summary10 PDFDocument1 pageSummary10 PDFDilip KumarNo ratings yet
- Linear Deformation Theory SummaryDocument1 pageLinear Deformation Theory SummaryDilip KumarNo ratings yet
- Summary2 PDFDocument1 pageSummary2 PDFDilip KumarNo ratings yet
- Lecture 4 - Summary: The Three Laws of Motion of Isaac NewtonDocument1 pageLecture 4 - Summary: The Three Laws of Motion of Isaac NewtonDilip KumarNo ratings yet
- Lecture 14-Summary: Beam Section Strength Criterion: Coupled Moment and Normal LoadDocument1 pageLecture 14-Summary: Beam Section Strength Criterion: Coupled Moment and Normal LoadDilip KumarNo ratings yet
- Summary10 PDFDocument1 pageSummary10 PDFDilip KumarNo ratings yet
- Lecture 12-Summary: Mohr-Coulomb Strength Criterion Physical Meaning: StrengthDocument1 pageLecture 12-Summary: Mohr-Coulomb Strength Criterion Physical Meaning: StrengthDilip KumarNo ratings yet
- Lecture 16 - Summary: Topic: How To Measure and Describe DeformationDocument1 pageLecture 16 - Summary: Topic: How To Measure and Describe DeformationDilip KumarNo ratings yet
- Lecture 6 - Summary: Review: Continuum ModelDocument1 pageLecture 6 - Summary: Review: Continuum ModelDilip KumarNo ratings yet
- Summary19 PDFDocument1 pageSummary19 PDFDilip KumarNo ratings yet
- Lecture 5 - Summary: Structural Scale (H, B, D..) REV Molecular ScaleDocument1 pageLecture 5 - Summary: Structural Scale (H, B, D..) REV Molecular ScaleDilip KumarNo ratings yet
- Lecture 3 - summary of Pi-theorem applications and analysesDocument1 pageLecture 3 - summary of Pi-theorem applications and analysesDilip KumarNo ratings yet
- Summary1 PDFDocument1 pageSummary1 PDFDilip KumarNo ratings yet
- Lecture 13-Summary: Beam Section Strength CriterionDocument1 pageLecture 13-Summary: Beam Section Strength CriterionDilip KumarNo ratings yet
- 1.050 Engineering Mechanics I: Beam Elasticity - Problem Solving Technique and ExamplesDocument6 pages1.050 Engineering Mechanics I: Beam Elasticity - Problem Solving Technique and ExamplesDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Example - Detailed StepsDocument7 pages1.050 Engineering Mechanics: Example - Detailed StepsDilip KumarNo ratings yet
- Stress distribution in foundation on two soilsDocument1 pageStress distribution in foundation on two soilsDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Strength Models 3D Model - Mohr-Coulomb Model Application To Sand PilesDocument6 pages1.050 Engineering Mechanics: Strength Models 3D Model - Mohr-Coulomb Model Application To Sand PilesDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Beam Elasticity - Derivation of Governing EquationDocument7 pages1.050 Engineering Mechanics: Beam Elasticity - Derivation of Governing EquationDilip KumarNo ratings yet
- General Solution Procedure: D W DDDocument6 pagesGeneral Solution Procedure: D W DDDilip KumarNo ratings yet
- 1.050 Engineering Mechanics I: Beam Elasticity - Problem Solving Technique and ExamplesDocument6 pages1.050 Engineering Mechanics I: Beam Elasticity - Problem Solving Technique and ExamplesDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Lecture 2: Dimensional Analysis and Atomic ExplosionDocument12 pages1.050 Engineering Mechanics: Lecture 2: Dimensional Analysis and Atomic ExplosionDilip KumarNo ratings yet
- Engineering Mechanics - Stresses and EquilibriumDocument4 pagesEngineering Mechanics - Stresses and EquilibriumDilip KumarNo ratings yet
- Engineering Mechanics - Stresses and EquilibriumDocument4 pagesEngineering Mechanics - Stresses and EquilibriumDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Lecture 6: Stresses and Equilibrium Application: Hoover DamDocument8 pages1.050 Engineering Mechanics: Lecture 6: Stresses and Equilibrium Application: Hoover DamDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Lecture 4: Stresses and Strength Stresses and Equilibrium Discrete ModelDocument16 pages1.050 Engineering Mechanics: Lecture 4: Stresses and Strength Stresses and Equilibrium Discrete ModelDilip KumarNo ratings yet
- Lec9 PDFDocument5 pagesLec9 PDFDilip KumarNo ratings yet
- 1.050 Engineering Mechanics: Lecture 3: Dimension Analysis and Application To Engineering StructuresDocument6 pages1.050 Engineering Mechanics: Lecture 3: Dimension Analysis and Application To Engineering StructuresDilip KumarNo ratings yet
- Bindura University of Science Education Chemistry DepartmentDocument3 pagesBindura University of Science Education Chemistry DepartmentdestinyyNo ratings yet
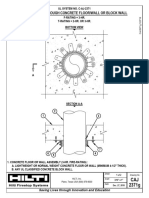
- Firestop System Details ASSET DOC LOC 2135392Document2 pagesFirestop System Details ASSET DOC LOC 2135392Amir IqbalNo ratings yet
- Mapetex Sel: Mapetex Ma Pe Te X Sel S ElDocument4 pagesMapetex Sel: Mapetex Ma Pe Te X Sel S ElrenandNo ratings yet
- CapstoneDocument9 pagesCapstoneDe-Andrie GotuatoNo ratings yet
- Analysis and Experimental Test of Electrical Characteristics On Bonding WireDocument21 pagesAnalysis and Experimental Test of Electrical Characteristics On Bonding WireCristian RoblesNo ratings yet
- PC Solutions GuideDocument31 pagesPC Solutions GuideNikola Randjelovic75% (4)
- Revised NEQSDocument10 pagesRevised NEQSKhalid Masood GhaniNo ratings yet
- Clean Steel Assessment PDFDocument25 pagesClean Steel Assessment PDFSk Wasim HaidarNo ratings yet
- Accepted Manuscript: 10.1016/j.jddst.2018.04.020Document25 pagesAccepted Manuscript: 10.1016/j.jddst.2018.04.020kieu trinhNo ratings yet
- Tablet and Capsule ManufacturingDocument28 pagesTablet and Capsule ManufacturingShibaprasad DandapatNo ratings yet
- Chapter 20-The First Law of Thermodynamics: Multiple ChoiceDocument13 pagesChapter 20-The First Law of Thermodynamics: Multiple ChoiceJhajha AlboniaNo ratings yet
- Wa0036.Document2 pagesWa0036.GMHSS VehariNo ratings yet
- 1pCRlAWRVB 50PyNhewz9gl6nwqJMTJP5Document27 pages1pCRlAWRVB 50PyNhewz9gl6nwqJMTJP5Rica Mae EsmenosNo ratings yet
- Reservoir Fluid Sampling & RecombinationDocument9 pagesReservoir Fluid Sampling & Recombinationdrojas70No ratings yet
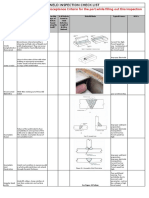
- Weld Inspection Check ListDocument3 pagesWeld Inspection Check ListBGRLNo ratings yet
- Pipe Welding Electrodes 1Document5 pagesPipe Welding Electrodes 1Adura OgunnuNo ratings yet
- Effectiveness of Ternary Blends in Mitigating ASR Demonstrated On The Modified Mortar-Bar TestDocument8 pagesEffectiveness of Ternary Blends in Mitigating ASR Demonstrated On The Modified Mortar-Bar TestjavNo ratings yet
- " Work Experience in Ishan Equipments Pvt. LTD.": Internship Presentation OnDocument20 pages" Work Experience in Ishan Equipments Pvt. LTD.": Internship Presentation OnrajivNo ratings yet
- Transistor Parameters FinalDocument2 pagesTransistor Parameters FinalgfdgNo ratings yet
- Const Estimate Made Easy by Engr Cajilla V0 99Document25 pagesConst Estimate Made Easy by Engr Cajilla V0 99Al Patrick Dela CalzadaNo ratings yet
- Mag General Business: Quality CertificateDocument1 pageMag General Business: Quality CertificateAnonymous 6LwW4qi6TiNo ratings yet
- Chapter 2 The Gaseous StateDocument3 pagesChapter 2 The Gaseous StateChai LianNo ratings yet
- Chemical Dechlorination of PCBs From Dielectric OilsDocument6 pagesChemical Dechlorination of PCBs From Dielectric Oilsgerodot2falconNo ratings yet
- Material Characterization Lab 2Document7 pagesMaterial Characterization Lab 2siddant vardeyNo ratings yet
- AbstractDocument2 pagesAbstractVivek SinghNo ratings yet
- 18.J.K.mitchell&K.soga - Fundamentals of Soil BehaviourDocument505 pages18.J.K.mitchell&K.soga - Fundamentals of Soil BehaviourJose Eduardo Murillo Fernandez88% (17)
- Food Coloring ChromatographyDocument7 pagesFood Coloring ChromatographyHenry Lee100% (1)
- Try at Home Make FerrofluidDocument2 pagesTry at Home Make FerrofluidJorge FarinhaNo ratings yet
- Thermodynamic Considerations in The Interactions of Nitrogen Oxides and Oxy Acids in The AtmosphereDocument5 pagesThermodynamic Considerations in The Interactions of Nitrogen Oxides and Oxy Acids in The AtmosphereKing Ray TabalbaNo ratings yet
- Creep Damage and Expected Creep LifeDocument9 pagesCreep Damage and Expected Creep LifeTrương Ngọc SơnNo ratings yet