You might also like
- Hierarchical Structure and Bus Voltage Control of DC MicrogridDocument13 pagesHierarchical Structure and Bus Voltage Control of DC MicrogridAli KarasukogluNo ratings yet
- 1 - Bidram2012Document14 pages1 - Bidram2012kareemNo ratings yet
- 2Document1 page2Anonymous rTRz30fNo ratings yet
- Hierarchical Linear-Nonlinear DC Microgrid Control: Juan S. Velez-Ramirez, Eduardo GiraldoDocument7 pagesHierarchical Linear-Nonlinear DC Microgrid Control: Juan S. Velez-Ramirez, Eduardo GiraldoBenny Wijaya NababanNo ratings yet
- Review of Primary Voltage and FrequencyDocument11 pagesReview of Primary Voltage and FrequencyDeepak GehlotNo ratings yet
- 1 Impacts of Renewables in Power GridDocument16 pages1 Impacts of Renewables in Power Gridzawad mridulNo ratings yet
- Electrical Power and Energy Systems: SciencedirectDocument9 pagesElectrical Power and Energy Systems: SciencedirectMina Youssef HalimNo ratings yet
- Hybrid - MG - Part - 2 - Control - Submission2 - BlackDocument18 pagesHybrid - MG - Part - 2 - Control - Submission2 - BlackivoNo ratings yet
- Supervisory Power Quality Control Scheme For A Grid-Off MicrogridDocument8 pagesSupervisory Power Quality Control Scheme For A Grid-Off MicrogridRamya PothurNo ratings yet
- Hierarchical Control of Parallel AC-DC C PDFDocument10 pagesHierarchical Control of Parallel AC-DC C PDFAditya jhaNo ratings yet
- Robust Voltage Control of DC Microgrids with Plug-and-Play CapabilityDocument11 pagesRobust Voltage Control of DC Microgrids with Plug-and-Play CapabilitymaynaraNo ratings yet
- Applied EnerDocument12 pagesApplied Enersoumiya mekraziNo ratings yet
- A Review On DC Microgrid Control TechniquesDocument11 pagesA Review On DC Microgrid Control TechniquesAyman KhalfallaNo ratings yet
- A Review On Overall Control of DC MicrogridsDocument26 pagesA Review On Overall Control of DC MicrogridsJaynendraSahuNo ratings yet
- Renewable and Sustainable Energy Reviews: Ebrahim Rokrok, Miadreza Sha Fie-Khah, João P.S. CatalãoDocument11 pagesRenewable and Sustainable Energy Reviews: Ebrahim Rokrok, Miadreza Sha Fie-Khah, João P.S. CatalãoPrabhat KumarNo ratings yet
- Advanced Control Solutions For Enhanced Resilience of Modern Power-Electronic-Interfaced Distribution SystemsDocument15 pagesAdvanced Control Solutions For Enhanced Resilience of Modern Power-Electronic-Interfaced Distribution Systemsndaryanto 92No ratings yet
- Distributed Adaptive Droop Control For DC Distribution SystemsDocument13 pagesDistributed Adaptive Droop Control For DC Distribution SystemsArian MahdavianNo ratings yet
- Distributed Secondary and Optimal Active Power Sharing Control For Islanded Microgrids With Communication DelaysDocument13 pagesDistributed Secondary and Optimal Active Power Sharing Control For Islanded Microgrids With Communication DelaysAmitMallickNo ratings yet
- Flexible Voltage Control Strategy Considering DisDocument10 pagesFlexible Voltage Control Strategy Considering DisKoti BabuNo ratings yet
- Sliding Droop Control For Distributed Generation in MicrogridsDocument10 pagesSliding Droop Control For Distributed Generation in MicrogridstiojejaoNo ratings yet
- Fardapaper Control Strategy For AC DC Microgrid With Hybrid Energy Storage Under Different Operating ModesDocument10 pagesFardapaper Control Strategy For AC DC Microgrid With Hybrid Energy Storage Under Different Operating ModesPradeep Kumar SahuNo ratings yet
- Renewable and Sustainable Energy Reviews: A. Rosini, A. Labella, A. Bonfiglio, R. Procopio, Josep M. GuerreroDocument21 pagesRenewable and Sustainable Energy Reviews: A. Rosini, A. Labella, A. Bonfiglio, R. Procopio, Josep M. GuerreroAli KhanNo ratings yet
- Design - Implementation - and - Operation - of - An - Education - Laboratory-Scale - Microgrid - IEEE Access Apr.2021Document18 pagesDesign - Implementation - and - Operation - of - An - Education - Laboratory-Scale - Microgrid - IEEE Access Apr.2021Chaymae MarzoukiNo ratings yet
- A Microgrid Multilayer Control Concept For Optimal Power Scheduling and Voltage ControlDocument10 pagesA Microgrid Multilayer Control Concept For Optimal Power Scheduling and Voltage ControlSumit RathorNo ratings yet
- Renewable and Sustainable Energy Reviews: Hamdi Abdi, Soheil Derafshi Beigvand, Massimo La ScalaDocument25 pagesRenewable and Sustainable Energy Reviews: Hamdi Abdi, Soheil Derafshi Beigvand, Massimo La Scalafateh oualiNo ratings yet
- Load Frequency Control of An Isolated Micro GridDocument11 pagesLoad Frequency Control of An Isolated Micro GridnhatvpNo ratings yet
- Evaluation of Control StrategyDocument14 pagesEvaluation of Control StrategyAnurag SrivastavaNo ratings yet
- Microgridsoperationinislandedmode FINAL R1Document28 pagesMicrogridsoperationinislandedmode FINAL R1Rodrigo AndradeNo ratings yet
- (R) - 2Document10 pages(R) - 2Nguyen Van QuyenNo ratings yet
- Energies 14 00510 With CoverDocument26 pagesEnergies 14 00510 With CoverMarcel NicolaNo ratings yet
- Control of DC MicrogridDocument21 pagesControl of DC MicrogridsureshNo ratings yet
- Energies 03 01622 PDFDocument17 pagesEnergies 03 01622 PDFSorin MiuNo ratings yet
- Review of Primary and Secondary Controls in Microgrid InvertersDocument17 pagesReview of Primary and Secondary Controls in Microgrid InvertersBright MelbaNo ratings yet
- Overview of The Project 1.1Document44 pagesOverview of The Project 1.1sharmila saravananNo ratings yet
- 1 s2.0 S037877962200164X MainDocument12 pages1 s2.0 S037877962200164X MainFernando OrnelasNo ratings yet
- Maintaining Power Quality in Off-Grid Microgrids via Coordinated DG ControlDocument8 pagesMaintaining Power Quality in Off-Grid Microgrids via Coordinated DG ControlSeekay Alais Karuppaiah CNo ratings yet
- Liu 2019Document14 pagesLiu 2019Ssadik CharadiNo ratings yet
- Distributed Cooperative Control Strategy For Stable Voltage Restoration and Optimal Power Sharing in Islanded DC MicrogridsDocument13 pagesDistributed Cooperative Control Strategy For Stable Voltage Restoration and Optimal Power Sharing in Islanded DC MicrogridsSM FerdousNo ratings yet
- A Review of Optimal Power Ow Studies Applied To Smart Grids and MicrogridsDocument3 pagesA Review of Optimal Power Ow Studies Applied To Smart Grids and MicrogridsJohn Duran Prevención Daño MecánicoNo ratings yet
- A Two-Layer Distributed Control Method For Islanded Networked Microgrid SystemsDocument14 pagesA Two-Layer Distributed Control Method For Islanded Networked Microgrid SystemsJEMAL DAWITNo ratings yet
- Voltage Regulations in Distribution Grids A SurveyDocument17 pagesVoltage Regulations in Distribution Grids A SurveybartolomeukrisNo ratings yet
- A Hybrid Power Sharing Control To Enhance The Small Signal Stability in DC MicrogridsDocument12 pagesA Hybrid Power Sharing Control To Enhance The Small Signal Stability in DC MicrogridsSM FerdousNo ratings yet
- Review On Primary Voltage & Frequency Control of Islanded MicrogridDocument5 pagesReview On Primary Voltage & Frequency Control of Islanded MicrogridQasim KhanNo ratings yet
- Survey On Microgrid Control Strategies: Energy ProcediaDocument7 pagesSurvey On Microgrid Control Strategies: Energy Procediasureh32No ratings yet
- Control Strategies For Microgrids With Distributed Energy Storage Systems - An OverviewDocument15 pagesControl Strategies For Microgrids With Distributed Energy Storage Systems - An OverviewJoão Adolpho VictorioNo ratings yet
- A Modeling and Simulation of Optimized Interconnection Between DC Microgrids With Novel Strategies of Voltage, Power and ControlDocument6 pagesA Modeling and Simulation of Optimized Interconnection Between DC Microgrids With Novel Strategies of Voltage, Power and ControlASHISHNo ratings yet
- 10.1109-JSYST.2013.2296075-Control Methods and Objectives For Electronically Coupled Distributed Energy Resources in Microgrids - A ReviewDocument13 pages10.1109-JSYST.2013.2296075-Control Methods and Objectives For Electronically Coupled Distributed Energy Resources in Microgrids - A Reviewarashalavi2006No ratings yet
- Smart Grid Integration of Renewable Energy Systems: October 2018Document6 pagesSmart Grid Integration of Renewable Energy Systems: October 2018Nur CaatoNo ratings yet
- Microgrid Central Controller Development and Hierarchical Control Implementation in The Intelligent Microgrid Lab of Aalborg UniversityDocument8 pagesMicrogrid Central Controller Development and Hierarchical Control Implementation in The Intelligent Microgrid Lab of Aalborg Universitygag aaNo ratings yet
- Energies 17 00293Document21 pagesEnergies 17 00293kvmtbvNo ratings yet
- Optimal Design of Microgrids in Autonomous and Grid-Connected Modes Using Particle Swarm OptimizationDocument15 pagesOptimal Design of Microgrids in Autonomous and Grid-Connected Modes Using Particle Swarm OptimizationAhmed WestministerNo ratings yet
- Electricity 03 00006Document33 pagesElectricity 03 00006ThịnhNo ratings yet
- Fully Distributed Cooperative Secondary Frequency and Voltage Control of Islanded MicrogridsDocument11 pagesFully Distributed Cooperative Secondary Frequency and Voltage Control of Islanded MicrogridsSwagath Kumar PandaNo ratings yet
- 10.1002@asjc.2021Document11 pages10.1002@asjc.2021hamidamza4No ratings yet
- 1 s2.0 S0142061522005956 MainDocument13 pages1 s2.0 S0142061522005956 MainBhargavi KmNo ratings yet
- Kaviri 2017Document8 pagesKaviri 2017Aqeel AnwarNo ratings yet
- 10 1109@tste 2019 2891072Document11 pages10 1109@tste 2019 2891072Aqeel AnwarNo ratings yet
- Hybrid_isochronous-droop_control_for_power_management_in_DC_microgridsDocument9 pagesHybrid_isochronous-droop_control_for_power_management_in_DC_microgridsamina.eloualiNo ratings yet
- Nonlinear Adaptive Control of Grid-Connected Three-Phase Inverters For Renewable Energy ApplicationsDocument17 pagesNonlinear Adaptive Control of Grid-Connected Three-Phase Inverters For Renewable Energy Applicationsimran5705074No ratings yet
- Load Forecasting in Electrical Distribution Grid of Medium VoltageDocument8 pagesLoad Forecasting in Electrical Distribution Grid of Medium VoltageOMARNo ratings yet
- Presentation - Seminar - Semantic WebDocument22 pagesPresentation - Seminar - Semantic WebOMARNo ratings yet
- Cleaning Process SOPDocument12 pagesCleaning Process SOPOMARNo ratings yet
- Only Page OneDocument10 pagesOnly Page OneOMARNo ratings yet
- Schéma Poste 225/20kV LydecDocument15 pagesSchéma Poste 225/20kV LydecOMARNo ratings yet
- How Does The BRAIN WorksDocument4 pagesHow Does The BRAIN WorksOMARNo ratings yet
- Incident 4 November 2006Document85 pagesIncident 4 November 2006OMARNo ratings yet
- S2 IS Ch-8 NotesDocument4 pagesS2 IS Ch-8 Noteshmdjqd2jpkNo ratings yet
- Quiz 1 Elecs 4Document182 pagesQuiz 1 Elecs 4Lance IanNo ratings yet
- Mos - Practice Book PDFDocument69 pagesMos - Practice Book PDFDipika GuptaNo ratings yet
- Semikron Datasheet Skhi 23 17 R l5002373Document11 pagesSemikron Datasheet Skhi 23 17 R l5002373Cristian Mena HidalgoNo ratings yet
- LTspice - IV PresentationDocument263 pagesLTspice - IV PresentationrobertNo ratings yet
- Moroccan Ministry of EnergyDocument2 pagesMoroccan Ministry of EnergySiyuan SunNo ratings yet
- Standing Waves LabDocument17 pagesStanding Waves LabOmarZinAbidineNo ratings yet
- 5-KW Solar System QuotationDocument1 page5-KW Solar System QuotationKidzee KidzeeNo ratings yet
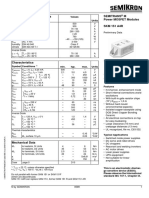
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDocument5 pagesAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- CAD Paniola Azad Kashmir 2018 DynamicsDocument3 pagesCAD Paniola Azad Kashmir 2018 DynamicsKhizer Tariq QureshiNo ratings yet
- Lesson Plan in Science 7Document7 pagesLesson Plan in Science 7Jon Mitchel GalangNo ratings yet
- Class 12 Cbse Physics Syllabus 2012-13Document7 pagesClass 12 Cbse Physics Syllabus 2012-13Sunaina RawatNo ratings yet
- Experimental Investigation of A Lysholm Turbine Operating WithDocument8 pagesExperimental Investigation of A Lysholm Turbine Operating WithmehmacarNo ratings yet
- Magnetism Guided NotesDocument14 pagesMagnetism Guided Notesdericksonj32No ratings yet
- Chapter 2 - AerospaceDocument36 pagesChapter 2 - AerospaceNuqman ZamzamNo ratings yet
- Course: Applied Thermodynamics Course Code: 10ME43 Course Type: Core Sem: 4Document3 pagesCourse: Applied Thermodynamics Course Code: 10ME43 Course Type: Core Sem: 4Prashanth JagadeeshNo ratings yet
- Holip 201207110500417645Document105 pagesHolip 201207110500417645Jose Sanchez Palma100% (2)
- All Questions of GT QuizzesDocument10 pagesAll Questions of GT QuizzesnaumanNo ratings yet
- Rr310204-Power ElectronicsDocument1 pageRr310204-Power ElectronicssivabharathamurthyNo ratings yet
- MEL 417 Lubrication Lec 030211Document37 pagesMEL 417 Lubrication Lec 030211Gamini SureshNo ratings yet
- Transmission Lines-2Document46 pagesTransmission Lines-2Dhruv GolaniNo ratings yet
- MULTIPRESSURE SYSTEMSDocument6 pagesMULTIPRESSURE SYSTEMSeslam AtitoNo ratings yet
- Accu-Touch Forehead Thermometer: User GuideDocument26 pagesAccu-Touch Forehead Thermometer: User GuideGUstavo RUizNo ratings yet
- PYL 100 2016 QMLect 02 ProbContEqDocument15 pagesPYL 100 2016 QMLect 02 ProbContEqPulkit AgarwalNo ratings yet
- DLN Bleed HeatDocument10 pagesDLN Bleed HeatCharles WilliamsNo ratings yet
- DC Power Supply and Voltage RegulatorsDocument73 pagesDC Power Supply and Voltage RegulatorsRalph Justine NevadoNo ratings yet
- HW1 Solution PDFDocument6 pagesHW1 Solution PDFZuhair AliNo ratings yet
- EXP1 - Photoelectric EffectDocument37 pagesEXP1 - Photoelectric Effectsteve jobsNo ratings yet
- Certificate of Reference Material #2 255-103 Viscosity Standard Mineral Oil Op 35 IPT 80Document2 pagesCertificate of Reference Material #2 255-103 Viscosity Standard Mineral Oil Op 35 IPT 80Renaldo MoontriNo ratings yet
- Steam Engineering Principles and Heat TransferDocument99 pagesSteam Engineering Principles and Heat Transferalex mobileNo ratings yet
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet
- A Mind at Play: How Claude Shannon Invented the Information AgeFrom EverandA Mind at Play: How Claude Shannon Invented the Information AgeRating: 4 out of 5 stars4/5 (52)
- Electrical Principles and Technology for EngineeringFrom EverandElectrical Principles and Technology for EngineeringRating: 4 out of 5 stars4/5 (4)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)