You might also like
- Control Digital: Función de Transferencia y SimulinkDocument23 pagesControl Digital: Función de Transferencia y SimulinkCsar PariapazaNo ratings yet
- Modelado de Un PénduloDocument5 pagesModelado de Un PénduloReNé ShunNo ratings yet
- Función de TransferenciaDocument5 pagesFunción de TransferenciaJose EkNo ratings yet
- Asignacion de PolosDocument12 pagesAsignacion de PolosMarlon Avila TarrilloNo ratings yet
- Señales en MatlabDocument13 pagesSeñales en MatlabserfaryNo ratings yet
- Teoría de control, examen final, modelo de espacio de estados de un telescopio espacialDocument1 pageTeoría de control, examen final, modelo de espacio de estados de un telescopio espacialJuan David Amaya MontoyaNo ratings yet
- SINTONIZAcion Ziegler NicholsDocument13 pagesSINTONIZAcion Ziegler NicholsAnonymous YDxuBwNo ratings yet
- Variables de EstadoDocument12 pagesVariables de EstadofreddyNo ratings yet
- Resumen Capitulo 1 - Sistemas de Control en Tiempo Discreto, OgataDocument8 pagesResumen Capitulo 1 - Sistemas de Control en Tiempo Discreto, OgataAngel De la TorreNo ratings yet
- Práctica de Controlabilidad y ObservabilidadDocument15 pagesPráctica de Controlabilidad y ObservabilidadsantiagoNo ratings yet
- Tarea 2 Control Automatico FullDocument33 pagesTarea 2 Control Automatico FullSergio Enrique Berrios GonzalezNo ratings yet
- Lab 7.0Document20 pagesLab 7.0Paula MéndezNo ratings yet
- Estanque Diluidor PiramidalDocument6 pagesEstanque Diluidor PiramidalPatricia Nicole Castro Mora0% (1)
- Analisis Temporal y Estabilidad MatlabDocument7 pagesAnalisis Temporal y Estabilidad MatlabJulian AvilaNo ratings yet
- Laboratorio #2. Modelado de Sistemas LinealesDocument6 pagesLaboratorio #2. Modelado de Sistemas LinealesRenzo GutiérrezNo ratings yet
- Clase 1 - Intro Matlab PDFDocument61 pagesClase 1 - Intro Matlab PDFMateo Felipe Ramirez ArbelaezNo ratings yet
- LGR Control AutomaticoDocument23 pagesLGR Control AutomaticoCarlos VergaraNo ratings yet
- Guia Control I Unexpo PDFDocument59 pagesGuia Control I Unexpo PDFSanders GoycoNo ratings yet
- 3 - Perceptron Multicapa PDFDocument18 pages3 - Perceptron Multicapa PDFDiego J RubioNo ratings yet
- Matlab fundamentos controlDocument67 pagesMatlab fundamentos controlDoobereiner CeronNo ratings yet
- La Transformada Z PDFDocument30 pagesLa Transformada Z PDFGabriel Oyaga RomeroNo ratings yet
- Tema 04 - Respuesta Temporal Con Routh v2 - VicenteDocument80 pagesTema 04 - Respuesta Temporal Con Routh v2 - Vicentecristianc2ga92No ratings yet
- La Transformada Z y Respuesta en Frecuencia Usando Matlab PDFDocument5 pagesLa Transformada Z y Respuesta en Frecuencia Usando Matlab PDFDaniel ToaquizaNo ratings yet
- Control climático invernaderos usando lógica difusaDocument12 pagesControl climático invernaderos usando lógica difusaFernando Acevedo FernandezNo ratings yet
- Funciones Transfer en CIA de PulsosDocument7 pagesFunciones Transfer en CIA de PulsosFabian Gerardo Vallejo JimenezNo ratings yet
- Practica - Funciones de TransferenciaDocument19 pagesPractica - Funciones de TransferenciaRafael Aguilar RiosNo ratings yet
- Funcion DescriptivaDocument21 pagesFuncion DescriptivaDerlis Romero75% (4)
- Modelado Matemático de Sistemas DinámicosDocument19 pagesModelado Matemático de Sistemas Dinámicospiwy017No ratings yet
- Transformada Z (Informe Ieee) .1Document6 pagesTransformada Z (Informe Ieee) .1misusibuNo ratings yet
- ObservadorDocument40 pagesObservadorJosé Eduardo ChairezNo ratings yet
- Variables de Estado DiscretaDocument11 pagesVariables de Estado DiscretaMauricio MenaNo ratings yet
- Control Moderno: Realimentación, LQR y H-infinitoDocument19 pagesControl Moderno: Realimentación, LQR y H-infinitoPerez AldairNo ratings yet
- Modelado y Linealización de Sistemas No Lineales Usando MATLAB y SIMULINKDocument5 pagesModelado y Linealización de Sistemas No Lineales Usando MATLAB y SIMULINKcristina_cano_29No ratings yet
- Filtros de KalmanDocument9 pagesFiltros de KalmanFrancisco SerranoNo ratings yet
- Diseño de controlador de estados para ubicación de polosDocument7 pagesDiseño de controlador de estados para ubicación de polosXfrali Medina GuevaraNo ratings yet
- Observador LuenbergerDocument5 pagesObservador LuenbergerJose CansecoNo ratings yet
- Transformada Z EjemplosDocument4 pagesTransformada Z EjemplosJeeferson Chirinos0% (1)
- Motero Contioso Vanessa María TFG PDFDocument90 pagesMotero Contioso Vanessa María TFG PDFLiza Montalvo BarreraNo ratings yet
- 1 Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko OgataDocument757 pages1 Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko OgataAlexandra RomeroNo ratings yet
- Simulacion de Sistemas Dinamicos Con SimulinkDocument40 pagesSimulacion de Sistemas Dinamicos Con Simulinkmanu79_7No ratings yet
- Coleccion Problem As CA 3Document134 pagesColeccion Problem As CA 3Cristian TarazonaNo ratings yet
- Compensadores de AdelantoDocument15 pagesCompensadores de Adelantosamuel0987516No ratings yet
- Control Predictivo y Cascada en Ingeniería de SistemasDocument32 pagesControl Predictivo y Cascada en Ingeniería de SistemasGeraldine Burgos GonzalesNo ratings yet
- Solucionario Mecánica de Fluidos - Robert Mott, 6ta Edición-CopiarDocument299 pagesSolucionario Mecánica de Fluidos - Robert Mott, 6ta Edición-CopiarAndy GuazhaNo ratings yet
- Adaptacion Con Un Transformador Cuarto de OndaDocument2 pagesAdaptacion Con Un Transformador Cuarto de OndaEzel IngrafNo ratings yet
- Curso Arduino Con Matlab y LabVIEWDocument4 pagesCurso Arduino Con Matlab y LabVIEWAlan Aguilar100% (1)
- Modelado Matemático de Sistemas FísicosDocument44 pagesModelado Matemático de Sistemas FísicosRicardoSntiagoNo ratings yet
- Lugar de Las Raices y BodeDocument34 pagesLugar de Las Raices y Boderufino1961No ratings yet
- Guía de Ejercicios Prueba N°2Document1 pageGuía de Ejercicios Prueba N°2Esbany Lanchipa SanchezNo ratings yet
- 04 Discretizacion Sistemas ContinuosDocument12 pages04 Discretizacion Sistemas ContinuosChristian Canchignia0% (1)
- Discretizacion y Transformada ZDocument4 pagesDiscretizacion y Transformada ZOscar David Contreras RodriguezNo ratings yet
- Cotizacion 6767312-3Document1 pageCotizacion 6767312-3JeanpBalbinNo ratings yet
- Sistema de Gases Medicos Una Guia Practica para El DisenoDocument22 pagesSistema de Gases Medicos Una Guia Practica para El DisenoJuan Manuel Valdez Von FürthNo ratings yet
- Módulo 9. Seguimiento, Evaluación de Cumplimiento y MejoraDocument11 pagesMódulo 9. Seguimiento, Evaluación de Cumplimiento y MejoraJeanpBalbinNo ratings yet
- Mortero UniconDocument2 pagesMortero UniconErick PeñaNo ratings yet
- Insht ntp078Document8 pagesInsht ntp078aldo3abNo ratings yet
- Discrepancia Con NTS 110Document4 pagesDiscrepancia Con NTS 110JeanpBalbinNo ratings yet
- Consultas Parte ElectricaDocument39 pagesConsultas Parte ElectricaJeanpBalbinNo ratings yet
- Cotizacion 6767934Document1 pageCotizacion 6767934JeanpBalbinNo ratings yet
- Cotizacion 6767934Document1 pageCotizacion 6767934JeanpBalbinNo ratings yet
- PromartDocument2 pagesPromartJeanpBalbinNo ratings yet
- Consultas IieeDocument15 pagesConsultas IieeJeanpBalbinNo ratings yet
- ManualDocument24 pagesManualManuel Alonso FernandezNo ratings yet
- Ha 10ele de Eett 1Document131 pagesHa 10ele de Eett 1JeanpBalbinNo ratings yet
- Rfi Inst. Elect. 1Document6 pagesRfi Inst. Elect. 1JeanpBalbinNo ratings yet
- La Clase en La Educación SuperiorDocument15 pagesLa Clase en La Educación SuperiorDouglas Payares PayaresNo ratings yet
- ClasesDocument43 pagesClasesMariano PerezNo ratings yet
- Grupo electrógeno Caterpillar DE250E0 250 kVA con cuadro de transferenciaDocument9 pagesGrupo electrógeno Caterpillar DE250E0 250 kVA con cuadro de transferenciaFerNo ratings yet
- Sistema de Gases Medicos Una Guia Practica para El DisenoDocument22 pagesSistema de Gases Medicos Una Guia Practica para El DisenoJuan Manuel Valdez Von FürthNo ratings yet
- Instrumento de Evaluación de Fichaje y Modelo Equipo NDocument12 pagesInstrumento de Evaluación de Fichaje y Modelo Equipo NGreka D-oNo ratings yet
- Instrumento de Evaluación de Fichaje y Modelo Equipo NDocument12 pagesInstrumento de Evaluación de Fichaje y Modelo Equipo NGreka D-oNo ratings yet
- RD 175 2021 Minem Dgaam PDFDocument32 pagesRD 175 2021 Minem Dgaam PDFJeanpBalbinNo ratings yet
- Zoom - Manual de UsuarioDocument37 pagesZoom - Manual de UsuarioRocio VelezNo ratings yet
- C250D6Document2 pagesC250D6JeanpBalbinNo ratings yet
- Equipos de Levante TeclesDocument47 pagesEquipos de Levante TeclesTerrorista Financiero0% (1)
- 397190c Informacionweb2020Document2 pages397190c Informacionweb2020William Ronald OSCANOA GUADALUPENo ratings yet
- Cátedra Vallejo Cronograma de ActividadesDocument3 pagesCátedra Vallejo Cronograma de ActividadesJeanpBalbinNo ratings yet
- Retiros en Cajeros para Clientes Mundo Sueldo Tcm1105-479848Document2 pagesRetiros en Cajeros para Clientes Mundo Sueldo Tcm1105-479848Jhon Alexander Córdova TorresNo ratings yet
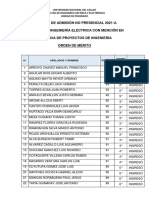
- Resultados Admisin Gerencia - 2021 ADocument2 pagesResultados Admisin Gerencia - 2021 AJeanpBalbinNo ratings yet
- Thank You - Tienda VirtualDocument2 pagesThank You - Tienda VirtualJeanpBalbinNo ratings yet
- PISO CONDUCTIVO Completo-Compressed - 2Document13 pagesPISO CONDUCTIVO Completo-Compressed - 2Nilton Y. Apaza AtencioNo ratings yet
- La Bios y Dual BiosDocument30 pagesLa Bios y Dual BiosreneNo ratings yet
- Instala HEC4 64 Bits 2019 PDFDocument11 pagesInstala HEC4 64 Bits 2019 PDFchristianNo ratings yet
- Medidas de AlmacenamientoDocument2 pagesMedidas de AlmacenamientoCLAUDIA SALAS100% (1)
- Programacion Orientada A Objetos 1ra EdiciónDocument17 pagesProgramacion Orientada A Objetos 1ra Edicióngiba269No ratings yet
- Constante de Los Inversos de Fibonacci - Wikipedia, La Enciclopedia LibreDocument1 pageConstante de Los Inversos de Fibonacci - Wikipedia, La Enciclopedia LibreFabian Alexis AstorgaNo ratings yet
- Especificaciones Técnicas Teléfono IPDocument3 pagesEspecificaciones Técnicas Teléfono IPJosue Luigi VilcapomaNo ratings yet
- GDP - Curso Ept PDFDocument25 pagesGDP - Curso Ept PDFDSOQUINo ratings yet
- Cómo Instalar Aplicaciones A Tu Tablet Android Manualmente Sin Google Play StoreDocument13 pagesCómo Instalar Aplicaciones A Tu Tablet Android Manualmente Sin Google Play StoreJasmin Mendoza Martinez100% (1)
- Practica MC ADocument5 pagesPractica MC ADaniela Paola Marcillo CedeñoNo ratings yet
- Manual GreatcutDocument18 pagesManual GreatcutBaby HermanasNo ratings yet
- Información para El Video de Navegadores SegurosDocument20 pagesInformación para El Video de Navegadores SegurosWaltDuri BlogNo ratings yet
- Tutorial Raspberry Pi - 3. Eye Toy Camera PS2 Motion SystemDocument22 pagesTutorial Raspberry Pi - 3. Eye Toy Camera PS2 Motion SystemVtdraculNo ratings yet
- 189 - PDFsam - Refactoring UI v1.0.2.Document30 pages189 - PDFsam - Refactoring UI v1.0.2.Jose Daniel Orio IslasNo ratings yet
- Examen 2 DLPDocument6 pagesExamen 2 DLPFranklin Edix Estrada MongeNo ratings yet
- Impresoras 3DDocument3 pagesImpresoras 3DCandelaria MarinoNo ratings yet
- ProyectodeBasesdeDatosavanzadaen MySQLDocument3 pagesProyectodeBasesdeDatosavanzadaen MySQLMayra FrancaNo ratings yet
- T Ucsg Pre Eco Cica 216 PDFDocument178 pagesT Ucsg Pre Eco Cica 216 PDFJuanNo ratings yet
- Ug Dialog4422 BP EsDocument114 pagesUg Dialog4422 BP EsPerico PalotesNo ratings yet
- Politicas Aplicadas en Las Maquinas Virtuales2Document11 pagesPoliticas Aplicadas en Las Maquinas Virtuales2Adrian YesirNo ratings yet
- Trabajo 3 Tecnico Asistente - Auxiliar Administrativo - HERRAMIENTAS TECNOLÓGICAS APLICADASDocument3 pagesTrabajo 3 Tecnico Asistente - Auxiliar Administrativo - HERRAMIENTAS TECNOLÓGICAS APLICADASMaria Caro Gaviria50% (4)
- Python ETL ProjectDocument2 pagesPython ETL ProjectFatima SánchezNo ratings yet
- Desarrollo WebDocument2 pagesDesarrollo WebfredmarroNo ratings yet
- Autoevaluación 1 S02.s1 - 20 puntos en 2 minutosDocument5 pagesAutoevaluación 1 S02.s1 - 20 puntos en 2 minutosCarlos Paul Vera MollaNo ratings yet
- Manual Usuario Transferencias ExteriorDocument12 pagesManual Usuario Transferencias ExteriorPablo MartínezNo ratings yet
- JUav P2 DRico UasMasterDocument31 pagesJUav P2 DRico UasMasterJavier MendozaNo ratings yet
- Evaluacion Diagnostica 4Document4 pagesEvaluacion Diagnostica 4Flor Maria Dominguez MegoNo ratings yet
- Facilito PasosDocument35 pagesFacilito PasosAdrian MamaniNo ratings yet
- Una Mirada Alternativa Sobre El Cancionero de PalacioDocument14 pagesUna Mirada Alternativa Sobre El Cancionero de PalaciovivesvivesNo ratings yet
- Como Enviar Correspondencia Por Correo ElectronicoDocument7 pagesComo Enviar Correspondencia Por Correo ElectronicoLevin MeridaNo ratings yet
- PVS Gfe 112Document206 pagesPVS Gfe 112Julio Cesar VegaNo ratings yet