You might also like
- Contactores eléctricos: clasificación y funcionamientoDocument38 pagesContactores eléctricos: clasificación y funcionamientoalperdaNo ratings yet
- Automata Programables y Elementos de Potencia (Teorico - Ministerio)Document45 pagesAutomata Programables y Elementos de Potencia (Teorico - Ministerio)Patricio Berbel100% (1)
- SecuencialesDocument15 pagesSecuencialesjose gonzalezNo ratings yet
- Eler11 PDFDocument8 pagesEler11 PDFAbraham Sanchez DelCampoNo ratings yet
- Montaje y Mecanizado de Cuadros EléctricosDocument55 pagesMontaje y Mecanizado de Cuadros Eléctricosangelmejias67% (3)
- infoPLC Net Guia 3 Instrucciones Basicas en Los Automatas ProgramablesDocument19 pagesinfoPLC Net Guia 3 Instrucciones Basicas en Los Automatas Programablesfuente perezNo ratings yet
- Cuadros EléctricosDocument6 pagesCuadros EléctricosALEX ESPINALNo ratings yet
- Automatismos ElectricosDocument30 pagesAutomatismos ElectricosGirenia Martinez0% (1)
- Tarea Logo 14 I PDFDocument3 pagesTarea Logo 14 I PDFBrayan BorjaNo ratings yet
- Sistemas Electronicos para Control de MotoresDocument3 pagesSistemas Electronicos para Control de MotoresJulioNo ratings yet
- 0400 El ContactorDocument7 pages0400 El ContactorDomingo ArroyoNo ratings yet
- Automatismos EléctricosDocument45 pagesAutomatismos EléctricosYuliana MaríaNo ratings yet
- Qué es un guardamotorDocument8 pagesQué es un guardamotorEdmar Noah100% (1)
- Análisis circuitos electrotecniaDocument20 pagesAnálisis circuitos electrotecniajulian_a_aNo ratings yet
- Ejercicios Diseño de AutomatismosDocument2 pagesEjercicios Diseño de AutomatismosJavier VicenteNo ratings yet
- Motores de Corriente ContinuaDocument41 pagesMotores de Corriente Continuacalo719No ratings yet
- Automatización por contactoresDocument64 pagesAutomatización por contactoresAndresLozadaNo ratings yet
- Diagramas de BodeDocument12 pagesDiagramas de BodeRenzo MahrNo ratings yet
- Instalación de Un Portero EléctricoDocument4 pagesInstalación de Un Portero EléctricoAlejo OrtizNo ratings yet
- Practica 3 Mando 2motores Restriccion de Arranque y ParadaDocument3 pagesPractica 3 Mando 2motores Restriccion de Arranque y ParadaJonnathan Tobayz100% (1)
- Arranque Y - DDocument1 pageArranque Y - DChovisteinNo ratings yet
- LOGO! in Details SPDocument120 pagesLOGO! in Details SPFidel Valenzuela Ramos100% (1)
- Conexión SteinmetzDocument5 pagesConexión SteinmetzPablo PirsNo ratings yet
- GUÍA DIDÁCTICA Máquinas EléctricasDocument42 pagesGUÍA DIDÁCTICA Máquinas EléctricasRICHARD MAYORGA CHAVEZNo ratings yet
- Diagnostico de Automatismos ElectricosDocument22 pagesDiagnostico de Automatismos ElectricosLUIS ICHAICOTO BONCANCANo ratings yet
- Arranque alternado de motoresDocument8 pagesArranque alternado de motoresPaul Mamani Paricanaza100% (1)
- Ejercicios-Resueltos Tematio o y P S eDocument4 pagesEjercicios-Resueltos Tematio o y P S eandres19712No ratings yet
- A4 - Guia de Electricida IndustrialDocument17 pagesA4 - Guia de Electricida IndustrialCristian Stiven Amado RuizNo ratings yet
- Automatismos, Autómatas y Control IndustrialDocument60 pagesAutomatismos, Autómatas y Control IndustrialPaul Jacome Freund100% (1)
- Nomenclaturas Electronicas y ElectricasDocument47 pagesNomenclaturas Electronicas y ElectricasJoseCHEO67% (6)
- 13.actividad Propuesta 13.1Document3 pages13.actividad Propuesta 13.1Mariano Suárez GuerreroNo ratings yet
- Manual de Instalacion y Configuracion AUTOCAD ELECTRICAL PDFDocument19 pagesManual de Instalacion y Configuracion AUTOCAD ELECTRICAL PDFRonilo ChoqueNo ratings yet
- Automatismos ParaninfoDocument2 pagesAutomatismos ParaninfoJavier Manso LoredoNo ratings yet
- Principios fundamentales del diagnóstico eléctricoDocument19 pagesPrincipios fundamentales del diagnóstico eléctricoLUIS ICHAICOTO BONCANCANo ratings yet
- Aparamenta EléctricaDocument22 pagesAparamenta Eléctricaluighi999No ratings yet
- Configuración de Instalaciones Domóticas y AutomáticasDocument2 pagesConfiguración de Instalaciones Domóticas y Automáticasgustavo villegas0% (2)
- Archivo 01Document6 pagesArchivo 01cacordova70No ratings yet
- Guia Didactica 1Document29 pagesGuia Didactica 1gonsanmaNo ratings yet
- Dimensionamiento de Un Laboratorio de Sistemas Eléctricos AvanzadosDocument80 pagesDimensionamiento de Un Laboratorio de Sistemas Eléctricos AvanzadosYesid GiraldoNo ratings yet
- Jose Luis Delgado - PLC (Trabajo Escrito)Document19 pagesJose Luis Delgado - PLC (Trabajo Escrito)Manuel ValdésNo ratings yet
- Tema 1 - Control y Supervisión de Los ProcesosDocument19 pagesTema 1 - Control y Supervisión de Los Procesospaco mariNo ratings yet
- Curso - Introduccion Al PLC Micro 1Document6 pagesCurso - Introduccion Al PLC Micro 1Manigoldo De la Cruz100% (2)
- Guia Basica de Puesta en Marcha 3G3MX2 PDFDocument2 pagesGuia Basica de Puesta en Marcha 3G3MX2 PDFAguirre Castillo Jose de JesusNo ratings yet
- Lógica Combinacional de Contactos o de RelésDocument4 pagesLógica Combinacional de Contactos o de RelésIngenieria_de_sistemasNo ratings yet
- Enunciado Practica3Document4 pagesEnunciado Practica3zakaria rahmaniNo ratings yet
- Mantenimiento eléctrico electrónicoDocument8 pagesMantenimiento eléctrico electrónicoVianey Guadalupe100% (1)
- Automatismos y Sistema de Arranque de Maquinas ElectricasDocument7 pagesAutomatismos y Sistema de Arranque de Maquinas ElectricasAndres Kamilo CabraNo ratings yet
- 69 - 22 Esquemas de Circuitos de Comando Con Contactores.Document3 pages69 - 22 Esquemas de Circuitos de Comando Con Contactores.Angel GutierrezNo ratings yet
- Funcionamiento Motor Inversión de GiroDocument2 pagesFuncionamiento Motor Inversión de GiroAlex DrakuNo ratings yet
- Practica N°8 ElectrotecniaDocument21 pagesPractica N°8 ElectrotecniaPam ZavaletaNo ratings yet
- El ContactorDocument6 pagesEl ContactorAlfredo GomezNo ratings yet
- Definicion Del ContactorDocument8 pagesDefinicion Del ContactorJesus Wilder Ala QuirozNo ratings yet
- Contact OresDocument19 pagesContact OresMiguel Angel Zegarra PintoNo ratings yet
- Instalacion de Contactores Electricos MiguelDocument9 pagesInstalacion de Contactores Electricos MiguelCarlos J Duran ForeNo ratings yet
- Contactores ElectricosDocument14 pagesContactores ElectricosJean CarlosNo ratings yet
- An ContactoresDocument11 pagesAn ContactoresJulio CruzNo ratings yet
- Automatismo Por ContactorDocument12 pagesAutomatismo Por ContactorYoselin Valdez ZapataNo ratings yet
- Contactores: principios y usosDocument14 pagesContactores: principios y usosMauricio Gonzalo CodegaNo ratings yet
- SIemensDocument9 pagesSIemensOmar AlmonteNo ratings yet
- ContactoresDocument5 pagesContactoresKarla RíosNo ratings yet
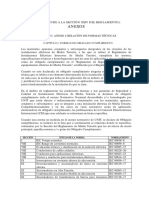
- Iso 9000 Normas TecnicasDocument4 pagesIso 9000 Normas TecnicasJuan AriguelNo ratings yet
- AntenasDocument59 pagesAntenasCristofer Muñoz HernandezNo ratings yet
- 100 Exitos de SiempreDocument51 pages100 Exitos de SiempreTrickyDicky288% (65)
- T3 Columnas Tabiques Rol de AoTransversalDocument16 pagesT3 Columnas Tabiques Rol de AoTransversalJuan AriguelNo ratings yet
- Varios - Puesta A TierraDocument21 pagesVarios - Puesta A Tierraedinm25No ratings yet
- Diodo Gunn PDFDocument4 pagesDiodo Gunn PDFJuan AriguelNo ratings yet
- Proyecto Resolucion Conduct Ores ElectricosDocument12 pagesProyecto Resolucion Conduct Ores ElectricosErick DelgadoNo ratings yet
- Iso 9000 Familia NormasDocument1 pageIso 9000 Familia NormasJuan AriguelNo ratings yet
- 0136 IE Proyecto Resolucion SENCAMER Contra IncendioDocument7 pages0136 IE Proyecto Resolucion SENCAMER Contra IncendioFranco Coco SartoriNo ratings yet
- Diodo Gunn PDFDocument4 pagesDiodo Gunn PDFJuan AriguelNo ratings yet
- Lineas de TransmisionDocument32 pagesLineas de Transmisionleseer10No ratings yet
- Ptierra PDFDocument44 pagesPtierra PDFВиктор КузнецоваNo ratings yet
- Comenzar Con DropboxDocument4 pagesComenzar Con Dropboxvalsar33No ratings yet
- Efecto Gunn Informacion PDFDocument47 pagesEfecto Gunn Informacion PDFJuan AriguelNo ratings yet
- Lineas de TransmisionDocument32 pagesLineas de Transmisionleseer10No ratings yet
- Lineas de TransmisionDocument32 pagesLineas de Transmisionleseer10No ratings yet
- Medicion Resistencias de Tierra - EnerguiaDocument5 pagesMedicion Resistencias de Tierra - EnerguiaPedro Garcia MolinaNo ratings yet
- Lineas de TransmisionDocument32 pagesLineas de Transmisionleseer10No ratings yet
- Medicion de Tierra en Zonas UrbanasDocument4 pagesMedicion de Tierra en Zonas UrbanasPyter CubaNo ratings yet
- Medición PAT IndustriaDocument20 pagesMedición PAT IndustriaJuan AriguelNo ratings yet
- Modelo de Puestas A TierrasDocument15 pagesModelo de Puestas A TierrasSteve da RiviaNo ratings yet
- Requisitos de Puesta A Tierra CenDocument84 pagesRequisitos de Puesta A Tierra Cengrover2010100% (1)
- Modelo de Puestas A TierrasDocument15 pagesModelo de Puestas A TierrasSteve da RiviaNo ratings yet
- Ignacio Agulleiro - Técnicas Modernas para La Medición de SPAT en Zonas UrbanasDocument47 pagesIgnacio Agulleiro - Técnicas Modernas para La Medición de SPAT en Zonas UrbanasJoel AngelNo ratings yet
- Estado Del Arte en El Diseño de Mallas de Tierra de Subestaciones PDFDocument11 pagesEstado Del Arte en El Diseño de Mallas de Tierra de Subestaciones PDFJuan AriguelNo ratings yet
- Masa Tierra y Neutro - Tres Conceptos DistintosDocument2 pagesMasa Tierra y Neutro - Tres Conceptos DistintosJosferbaNo ratings yet
- Electrodo Quimico Chemrod PDFDocument1 pageElectrodo Quimico Chemrod PDFJose Rojas CorralesNo ratings yet
- Ejemplo Cálculo de Tierra de Subestación de EdificioDocument19 pagesEjemplo Cálculo de Tierra de Subestación de Edificioanon_378744779No ratings yet
- Calclulo de La Malla de Puesta A Tierra de Una SubestaciónDocument6 pagesCalclulo de La Malla de Puesta A Tierra de Una SubestaciónHUgo TovarNo ratings yet
- Diseño de Sistemas de Puestas A Tierra A La Luz de La Compatibilidad Electromagnética. Ing. Favio Casas OspinaDocument8 pagesDiseño de Sistemas de Puestas A Tierra A La Luz de La Compatibilidad Electromagnética. Ing. Favio Casas OspinaObatai KhanNo ratings yet
- Ley Laboral Servidores Publicos TlaxcalaDocument29 pagesLey Laboral Servidores Publicos TlaxcalaantonioescobarvargasNo ratings yet
- IEEE Cable UtpDocument3 pagesIEEE Cable UtpEdmond AndresNo ratings yet
- Trabajo Colaborativo 2 Intervenciones ColectivasDocument12 pagesTrabajo Colaborativo 2 Intervenciones ColectivasIsabel PardoNo ratings yet
- Procedimiento Remate VehiculosDocument1 pageProcedimiento Remate VehiculosFrancisco ReyesNo ratings yet
- Manual de GerenciamientoDocument15 pagesManual de GerenciamientoJhon Hernández Pulgarín0% (1)
- Un Enfoque para Medir La Concentración Industrial y Su Aplicación Al Caso de México PDFDocument37 pagesUn Enfoque para Medir La Concentración Industrial y Su Aplicación Al Caso de México PDFJavier del RioNo ratings yet
- JOTITADocument3 pagesJOTITAflor huasqui buendiaNo ratings yet
- Hoja de Vida: I. Perfil OcupacionalDocument33 pagesHoja de Vida: I. Perfil Ocupacionalmulti correoNo ratings yet
- S15 - Reescritura. Versión Final de La PC2 (Formato UTP) (1) YA ESTADocument7 pagesS15 - Reescritura. Versión Final de La PC2 (Formato UTP) (1) YA ESTAangel pintadoNo ratings yet
- Logistica CMRDocument3 pagesLogistica CMROmalimusik TapiaNo ratings yet
- Requerimiento Ccecc-Sc-003-28.06.2021Document1 pageRequerimiento Ccecc-Sc-003-28.06.2021Elber John Chuctaya QuispeNo ratings yet
- Actividad Eje # 4, MercadosDocument24 pagesActividad Eje # 4, MercadosJeismar TellezNo ratings yet
- Politica PetroDocument1 pagePolitica PetroKevin Malqui CasianoNo ratings yet
- DEBER No. 3 D3-2UDocument5 pagesDEBER No. 3 D3-2UNICOLE PÉREZNo ratings yet
- Taller Realización Auditoria InternaDocument4 pagesTaller Realización Auditoria InternaAna Maria AlvarezNo ratings yet
- Programa Arquitectonico HospitalDocument19 pagesPrograma Arquitectonico HospitalEdison Cogua UsecheNo ratings yet
- Cronograma de ActividadesDocument4 pagesCronograma de Actividadesmario23797979No ratings yet
- Principios comunes en sistemas de gestiónDocument6 pagesPrincipios comunes en sistemas de gestiónFernando Cardenas FuentesNo ratings yet
- AsodirDocument2 pagesAsodirLesny Olier Mosquera RenteriaNo ratings yet
- Practica Comandos MS-DOSDocument7 pagesPractica Comandos MS-DOSandres NestorNo ratings yet
- Proyecto Final - Sistemas ExpertosDocument6 pagesProyecto Final - Sistemas Expertosleidymiel2585No ratings yet
- S04.s1 - Principios Filosóficos y Valores Del D.ODocument13 pagesS04.s1 - Principios Filosóficos y Valores Del D.OAndrea Alexandra Pareja MamaniNo ratings yet
- IN-GI-SPCO-002 Instructivo de Arranque para VariadoresDocument19 pagesIN-GI-SPCO-002 Instructivo de Arranque para Variadoresfrancklin100% (1)
- Polaridad de Los Transformadores EléctricosDocument2 pagesPolaridad de Los Transformadores EléctricosPablo Daniel Noe AyalaNo ratings yet
- Total A Pagar: ¡Hola! Te Enviamos Tu Recibo Del MesDocument3 pagesTotal A Pagar: ¡Hola! Te Enviamos Tu Recibo Del MesEduardo ValeraNo ratings yet
- D310 - Hoja de DatosDocument2 pagesD310 - Hoja de DatosMiguel Angel Torres AyalaNo ratings yet
- Caso The Guardian - Grupo2Document3 pagesCaso The Guardian - Grupo2rodrigo pineda schleef100% (1)
- Aceptaciones Bancarias DOSDocument4 pagesAceptaciones Bancarias DOSClaudia AlvaradoNo ratings yet
- Simulacion en Solidworks TransferenciaDocument9 pagesSimulacion en Solidworks TransferenciaWagner Aguirre RiveraNo ratings yet
- Test Auxiliar MecánicaDocument2 pagesTest Auxiliar MecánicaOlga Gómez V.No ratings yet