You might also like
- Excel PPTDocument25 pagesExcel PPTShanmugapriyaVinodkumar83% (6)
- Anthea Operation and Installation Manual PDFDocument64 pagesAnthea Operation and Installation Manual PDFmilen65100% (1)
- 95SA Installation Manual 1010Document89 pages95SA Installation Manual 1010belial111No ratings yet
- Installation Manual Sailor 6588 Gnss DgnssDocument102 pagesInstallation Manual Sailor 6588 Gnss DgnssAnonymous XnufDzrpoNo ratings yet
- Echosounder 4620Document118 pagesEchosounder 4620VM ServicesNo ratings yet
- Apt - SVDR 3000Document5 pagesApt - SVDR 3000hmmbaconNo ratings yet
- JUE 251 501 Installation ManualDocument113 pagesJUE 251 501 Installation Manualpapaki2100% (3)
- 6280 81 82 AIS Installation ManualDocument142 pages6280 81 82 AIS Installation ManualATF20140% (1)
- Radar Manual STN ATLASDocument122 pagesRadar Manual STN ATLAScozdim86% (7)
- Installation Manual: VDR Voyage Master II, III and IVDocument28 pagesInstallation Manual: VDR Voyage Master II, III and IVJay Sanchaniya100% (1)
- Yokogawa CMZ700B - GyroCompass GS 30oct99 EDocument4 pagesYokogawa CMZ700B - GyroCompass GS 30oct99 EPatricio Campbell100% (1)
- JSS-720EMaintenance 020419 SWDocument12 pagesJSS-720EMaintenance 020419 SWRobin LalNo ratings yet
- Instructions For Installing VisionMaster FT in The FieldDocument53 pagesInstructions For Installing VisionMaster FT in The FieldMohamed ElhossenyNo ratings yet
- SAILOR 6120 Installation ManualDocument116 pagesSAILOR 6120 Installation ManualFernando Rebolo100% (1)
- How To Access The UKHO FTP SiteDocument1 pageHow To Access The UKHO FTP SiteNishant Pandya100% (1)
- CXC CSEC Information Technology January 2017 P2Document22 pagesCXC CSEC Information Technology January 2017 P2Jaleel Jones0% (1)
- CGI EA Maturity ModelDocument1 pageCGI EA Maturity ModelneternityNo ratings yet
- JHS-770 Software Upgrade ProcedureDocument19 pagesJHS-770 Software Upgrade ProcedureGOGO COllZZss100% (2)
- Radarpilot 1100Document7 pagesRadarpilot 1100ioannides_christos100% (1)
- Operation Manual V3.1Document35 pagesOperation Manual V3.1Zakaria ChowdhuryNo ratings yet
- JLN-205MKII Installation Manual 7ZPNA3605 PDFDocument54 pagesJLN-205MKII Installation Manual 7ZPNA3605 PDFKuang Ah HockNo ratings yet
- Installation Manual For BNWAS HighlanderDocument48 pagesInstallation Manual For BNWAS HighlanderZakaria ChowdhuryNo ratings yet
- Password: Remarks Password Remarks Password C. Operation Unit Master Compass Code NoDocument1 pagePassword: Remarks Password Remarks Password C. Operation Unit Master Compass Code Noueg liepajaNo ratings yet
- UAIS DEBEG 3400 Technical ManualDocument72 pagesUAIS DEBEG 3400 Technical Manualborisgolodenko100% (3)
- TR8000.Operator and Installation Manual Part 2 1790181Document32 pagesTR8000.Operator and Installation Manual Part 2 1790181milen65No ratings yet
- Furuno RadarDocument195 pagesFuruno RadarПавел СубботинNo ratings yet
- Jma 9102 - Jma 9252 - Jma 9303 - Jma 7102 - Jma 7252 - Jma 7303 Field Service ManuelDocument192 pagesJma 9102 - Jma 9252 - Jma 9303 - Jma 7102 - Jma 7252 - Jma 7303 Field Service Manuelmurat100% (1)
- 11 - NautoAlarm Serv - Man ++Document22 pages11 - NautoAlarm Serv - Man ++MariosNo ratings yet
- Abcdef: Meridian Gyrocompass System ManualDocument82 pagesAbcdef: Meridian Gyrocompass System ManualMorseunited100% (5)
- Gyro Compass Equipment Standard 20 Plus With TMC: Service ManualDocument84 pagesGyro Compass Equipment Standard 20 Plus With TMC: Service ManualArchanaSingh100% (3)
- Furuno Fa-150 Ais Installation ManualDocument52 pagesFuruno Fa-150 Ais Installation ManualDwightFerrer100% (2)
- E900 V2 Level 300 2018 PDFDocument161 pagesE900 V2 Level 300 2018 PDFahmedshirazarNo ratings yet
- Rutter VDR-100 G2 - G3 Diagnostic Checklist - Rev 8.0 PDFDocument11 pagesRutter VDR-100 G2 - G3 Diagnostic Checklist - Rev 8.0 PDFajc2_1984100% (1)
- Sailor Tt3000 Minic Gmdss ManualDocument97 pagesSailor Tt3000 Minic Gmdss ManualLito VertziniNo ratings yet
- JMA-9800 Instruction ManualDocument372 pagesJMA-9800 Instruction ManualMorseunited100% (1)
- TRANSAS T105 AIS User-Manual-1363692Document85 pagesTRANSAS T105 AIS User-Manual-1363692Mike Olumide Johnson67% (3)
- General Specifications: GS 80B10M16E 1 CMZ900S GyrocompassDocument11 pagesGeneral Specifications: GS 80B10M16E 1 CMZ900S Gyrocompasszied nasriNo ratings yet
- TT3026 Software Reference ManualDocument218 pagesTT3026 Software Reference ManualSandreaneSchwartzNo ratings yet
- VDR Operation Manual - HMT-100 PDFDocument28 pagesVDR Operation Manual - HMT-100 PDFdotatchuongNo ratings yet
- 3027 Installation MZ v4Document87 pages3027 Installation MZ v4EvgeniiNo ratings yet
- Bnwas JRCDocument100 pagesBnwas JRCSang Aji Jaya Suseno67% (3)
- JMA-5300 ServiceManualDocument160 pagesJMA-5300 ServiceManualOAT100% (1)
- Furuno Felcom 18 Installation ManualDocument60 pagesFuruno Felcom 18 Installation ManualtariktunadNo ratings yet
- Arpa Radar - Vision Master - Arpa Radarchart Radar - Ship's Manual Volume 2 (Configuration, Chart Installation & Commissioning) PDFDocument436 pagesArpa Radar - Vision Master - Arpa Radarchart Radar - Ship's Manual Volume 2 (Configuration, Chart Installation & Commissioning) PDFCarlos Eduardo Galvão100% (1)
- 7080 HandbookDocument139 pages7080 Handbookdony prabuNo ratings yet
- Samyung RadioCommunication STR6000A ServiceManualDocument47 pagesSamyung RadioCommunication STR6000A ServiceManualnikola28100% (3)
- Maintenance Manual Maintenance Manual Maintenance Manual Maintenance ManualDocument102 pagesMaintenance Manual Maintenance Manual Maintenance Manual Maintenance ManualЮрий. Б0% (1)
- JRC SSAS InstructionDocument50 pagesJRC SSAS InstructionAl Nakheel100% (2)
- SVDR-Pro Installation 071015 Rev.1.2Document76 pagesSVDR-Pro Installation 071015 Rev.1.2lollardNo ratings yet
- Tron 40VDR Float Free Capsule Inst & Tech ManualDocument16 pagesTron 40VDR Float Free Capsule Inst & Tech Manualleo.wainer50% (2)
- SR03-01Universal NMEA To Synchro ConverterDocument47 pagesSR03-01Universal NMEA To Synchro Converterkostasxave80% (5)
- RGC11Document194 pagesRGC11cristipoc100% (1)
- JRC jss-296 jss-596 jss-896 SMDocument220 pagesJRC jss-296 jss-596 jss-896 SMMahfooz Ali100% (2)
- Samyung SRG-1150DN Service ManualDocument47 pagesSamyung SRG-1150DN Service Manualsoporte67% (3)
- JCY1900 APT Procedure-NewDocument29 pagesJCY1900 APT Procedure-NewMacro Love0% (1)
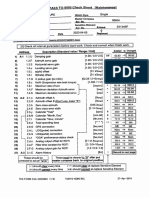
- TG-8000 Check Sheet (MAINTENANCE)Document3 pagesTG-8000 Check Sheet (MAINTENANCE)REY JESUS HERNANDEZ JIMENEZ100% (1)
- Tg-8000 Gyro Blank ChecklistDocument3 pagesTg-8000 Gyro Blank ChecklistNishant PandyaNo ratings yet
- GYRO COMPASS TG-8000 Check SheetDocument3 pagesGYRO COMPASS TG-8000 Check SheetUday LikerNo ratings yet
- TG6000 Maintenance ChecklistDocument3 pagesTG6000 Maintenance Checklistsaju.hostmostenggNo ratings yet
- TG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Document12 pagesTG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Al NakheelElectronicsNo ratings yet
- TG-8000 Check Sheet Maintenance REVISEDDocument3 pagesTG-8000 Check Sheet Maintenance REVISEDartur.damascenoNo ratings yet
- Wisco Adventure - Ani GyroDocument2 pagesWisco Adventure - Ani Gyroshaikh junaidNo ratings yet
- Special Purpose Gear Units Api 613 Fifth Edition Data Sheet Si UnitsDocument4 pagesSpecial Purpose Gear Units Api 613 Fifth Edition Data Sheet Si UnitstutuionutNo ratings yet
- 2008-07-31 074935 04 CelicaDocument10 pages2008-07-31 074935 04 CelicaCesar Alarcón Solis100% (1)
- Thakkar Bapa JivanDocument26 pagesThakkar Bapa JivanNishant PandyaNo ratings yet
- VevishalDocument315 pagesVevishalNishant PandyaNo ratings yet
- RagangajaliyoDocument287 pagesRagangajaliyoNishant PandyaNo ratings yet
- Is IEC 60947-2 No of Samples For Test For Rayzon Solar PanelsDocument2 pagesIs IEC 60947-2 No of Samples For Test For Rayzon Solar PanelsNishant PandyaNo ratings yet
- Shiva Stotra NamavaliDocument7 pagesShiva Stotra NamavaliNishant PandyaNo ratings yet
- Radhiyali RaatDocument209 pagesRadhiyali RaatNishant PandyaNo ratings yet
- KillolDocument89 pagesKillolNishant PandyaNo ratings yet
- RadarsDocument2 pagesRadarsNishant PandyaNo ratings yet
- Radar Observation of Wind Farms in Various Weather ConditionsDocument5 pagesRadar Observation of Wind Farms in Various Weather ConditionsNishant PandyaNo ratings yet
- Test Report QO7NG3051S30KW 1588883Document124 pagesTest Report QO7NG3051S30KW 1588883Nishant PandyaNo ratings yet
- Naval Radar Systems 4 2Document12 pagesNaval Radar Systems 4 2Nishant Pandya100% (1)
- Rayzon Poly Crystaline Solar PanelDocument2 pagesRayzon Poly Crystaline Solar PanelNishant PandyaNo ratings yet
- IEC For Rayzon PanelsDocument4 pagesIEC For Rayzon PanelsNishant PandyaNo ratings yet
- IEC For Rayzon PanelsDocument4 pagesIEC For Rayzon PanelsNishant PandyaNo ratings yet
- User Guide: Maris ECDIS900 Backup/ Restore Procedures For SW UpgradesDocument26 pagesUser Guide: Maris ECDIS900 Backup/ Restore Procedures For SW UpgradesNishant Pandya100% (1)
- Installation Manual: Master Bridge AssistantDocument24 pagesInstallation Manual: Master Bridge AssistantNishant PandyaNo ratings yet
- Quick Reference Card: MARIS Bridge AssistantDocument8 pagesQuick Reference Card: MARIS Bridge AssistantNishant PandyaNo ratings yet
- Mantadigital MultifunctionDocument2 pagesMantadigital MultifunctionNishant PandyaNo ratings yet
- MACKAY MARINE Magnetron Cross-Reference by Radar Make & ModelDocument1 pageMACKAY MARINE Magnetron Cross-Reference by Radar Make & ModelNishant PandyaNo ratings yet
- FMD 3300 - CPA-TCPA Settings-2 PDFDocument1 pageFMD 3300 - CPA-TCPA Settings-2 PDFNishant PandyaNo ratings yet
- fmd-3200 Cmap Professional Update Procedures PDFDocument6 pagesfmd-3200 Cmap Professional Update Procedures PDFNishant PandyaNo ratings yet
- Technical Notification: Using The Old TT-3026x Cable Together With The TT-3027x TransceiverDocument5 pagesTechnical Notification: Using The Old TT-3026x Cable Together With The TT-3027x TransceiverNishant PandyaNo ratings yet
- TECDIS Feature Guide 25Document6 pagesTECDIS Feature Guide 25Nishant PandyaNo ratings yet
- T-2424 FerdigDocument6 pagesT-2424 FerdigNishant PandyaNo ratings yet
- 1603PDF Catalogue No. M-1556cDocument8 pages1603PDF Catalogue No. M-1556cNishant PandyaNo ratings yet
- 988-10959-001 ECDIS900 Technical ManualDocument72 pages988-10959-001 ECDIS900 Technical ManualNishant PandyaNo ratings yet
- FMD 3300 - CPA-TCPA Settings PDFDocument1 pageFMD 3300 - CPA-TCPA Settings PDFNishant PandyaNo ratings yet
- Tokimec TG-6000-Service-Manual PDFDocument220 pagesTokimec TG-6000-Service-Manual PDFNishant Pandya100% (1)
- IoT-Lecture-05 Embedded SystemDocument29 pagesIoT-Lecture-05 Embedded Systemutkarsh.shrivastava.ug21No ratings yet
- User - S Manual of Haiwell Cloud BoxDocument28 pagesUser - S Manual of Haiwell Cloud BoxMOHAMMED AKILNo ratings yet
- All Sim Whatapp Package PDFDocument4 pagesAll Sim Whatapp Package PDFSheikh Muhammad AsifNo ratings yet
- Facets Test Factory PDFDocument4 pagesFacets Test Factory PDFArnabNo ratings yet
- Healthcare SEM PDFDocument7 pagesHealthcare SEM PDFN InbasagaranNo ratings yet
- India Insurance Perspective PDFDocument24 pagesIndia Insurance Perspective PDFaishwarya raikarNo ratings yet
- Commodore Magazine Vol-08-N03 1987 MarDocument132 pagesCommodore Magazine Vol-08-N03 1987 MarSteven DNo ratings yet
- Fujitsu Lifebook A530Document87 pagesFujitsu Lifebook A530Tomasz SkrzypińskiNo ratings yet
- OB100Document6 pagesOB100Hoangvinh DuongNo ratings yet
- Control Statements in RDocument34 pagesControl Statements in Rajith kumar n.k.bNo ratings yet
- Esp32-S2 Technical Reference Manual enDocument420 pagesEsp32-S2 Technical Reference Manual enZafer AtakanNo ratings yet
- Microsoft - Practicetest.dp 900.study - Guide.2021 Mar 06.by - Cash.75q.vceDocument20 pagesMicrosoft - Practicetest.dp 900.study - Guide.2021 Mar 06.by - Cash.75q.vceKarthigai SelvanNo ratings yet
- BhsInggris The WorldWideWeb2Document2 pagesBhsInggris The WorldWideWeb2Daniel TendeanNo ratings yet
- Report 2Document8 pagesReport 2moenali338No ratings yet
- PHP MySQL Course ContentsDocument2 pagesPHP MySQL Course ContentsKalPurushNo ratings yet
- Inkjet Printer: Smart Handheld Printing PlatformDocument2 pagesInkjet Printer: Smart Handheld Printing PlatformMelahel Global SolutionsNo ratings yet
- Titled SectionsDocument3 pagesTitled SectionsNino UklebaNo ratings yet
- Using An Online Auction System in Open Source PDFDocument8 pagesUsing An Online Auction System in Open Source PDFRachmat Aulia0% (1)
- Band in A Box 2016 ManualDocument644 pagesBand in A Box 2016 Manualmartzo-0% (1)
- Field BusDocument41 pagesField BussabinashyjiNo ratings yet
- Phrasal VerbsDocument7 pagesPhrasal VerbsmahaNo ratings yet
- CVSS Guide 2Document33 pagesCVSS Guide 2tesNo ratings yet
- Instruction Sheet For HTML Spoken Tutorial Team, IIT Bombay: 5.1 Instructions To PractiseDocument2 pagesInstruction Sheet For HTML Spoken Tutorial Team, IIT Bombay: 5.1 Instructions To PractiseAjit PriyadarshiNo ratings yet
- SiteMap 3 - Sheet1Document17 pagesSiteMap 3 - Sheet1Muhammad Farzad100% (1)
- Posting Comments Into The NC File: Using To Format CommentsDocument4 pagesPosting Comments Into The NC File: Using To Format CommentsHoang LamNo ratings yet
- Compiler 2021 Module 1Document15 pagesCompiler 2021 Module 1ZealNo ratings yet
- ORA-01555 and Other Errors While Exporting Table With LOBs, How To Detect Lob Corruption. (Doc ID 452341.1)Document1 pageORA-01555 and Other Errors While Exporting Table With LOBs, How To Detect Lob Corruption. (Doc ID 452341.1)Alberto Hernandez HernandezNo ratings yet