You might also like
- Cap7 FallaAsim PDFDocument63 pagesCap7 FallaAsim PDFRichard Callo CNo ratings yet
- Conexion de MotoresDocument1 pageConexion de MotoresCristhian TapiaNo ratings yet
- Pruebas RequeridasDocument145 pagesPruebas RequeridasCristhian TapiaNo ratings yet
- Analisis de Fallas Con PowerworldDocument242 pagesAnalisis de Fallas Con PowerworldDiego Cotto50% (2)
- Simbolos y DiagramasDocument19 pagesSimbolos y Diagramasapi-383281889% (18)
- Analisis Fallas PDFDocument28 pagesAnalisis Fallas PDFMilder OruéNo ratings yet
- Introduccion Lectura de NyquistDocument2 pagesIntroduccion Lectura de NyquistCristhian TapiaNo ratings yet
- Scilab Beginners - En.esDocument33 pagesScilab Beginners - En.esCristhian TapiaNo ratings yet
- Resumen Examen GestionDocument5 pagesResumen Examen GestionCristhian TapiaNo ratings yet
- Regulación Continua Con El SFB 41 - FB 41CONT - CDocument1 pageRegulación Continua Con El SFB 41 - FB 41CONT - CCristhian TapiaNo ratings yet
- Trabajo 4 LaboratorioDocument1 pageTrabajo 4 LaboratorioCristhian TapiaNo ratings yet
- Trabajo 2 LaboratorioDocument1 pageTrabajo 2 LaboratorioCristhian TapiaNo ratings yet
- PLC ConfiguracionDocument13 pagesPLC ConfiguracionCristhian TapiaNo ratings yet
- Regulación Continua Con El SFB 41 - FB 41CONT - CDocument6 pagesRegulación Continua Con El SFB 41 - FB 41CONT - Cdanny casdiNo ratings yet
- Actividades Practicas 2016Document22 pagesActividades Practicas 2016Cristhian TapiaNo ratings yet
- Tenencia ResponzableDocument1 pageTenencia ResponzablePipePerezEspinozaNo ratings yet
- Examen Informe NatacionDocument23 pagesExamen Informe NatacionCristhian TapiaNo ratings yet
- Diagrama Unilineal Fabrica: Cuadro de Cargas de FuerzaDocument1 pageDiagrama Unilineal Fabrica: Cuadro de Cargas de FuerzaCristhian TapiaNo ratings yet
- Declaración Simple de InhabilidadDocument1 pageDeclaración Simple de InhabilidadJocsanSaavedraNo ratings yet
- PFC 2826Document175 pagesPFC 2826fradiaNo ratings yet
- Corriente de CortocircuitoDocument18 pagesCorriente de CortocircuitoELIEZERMANUELNo ratings yet
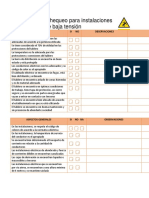
- CHEQUEODocument7 pagesCHEQUEOCristhian Tapia100% (1)
- Semana 3 Guia - de - Trabajo - DESARROLLO - LIMPIO - E - ISODocument4 pagesSemana 3 Guia - de - Trabajo - DESARROLLO - LIMPIO - E - ISOCristhian TapiaNo ratings yet
- Ejercicios EstabilizacionDocument2 pagesEjercicios EstabilizacionCristhian TapiaNo ratings yet
- Ecuación DiferencialDocument33 pagesEcuación DiferencialCristhian TapiaNo ratings yet
- Valvula Solenoide VignolaDocument15 pagesValvula Solenoide VignolatequeonNo ratings yet
- PFC 2826Document175 pagesPFC 2826fradiaNo ratings yet
- Estabilidad y Criterio de RuthDocument13 pagesEstabilidad y Criterio de RuthCristhian TapiaNo ratings yet
- InstruccionesDocument1 pageInstruccionesArcasis CrassNo ratings yet
- Fisica 1 Funcion Cuadratica y Su Grafica Fundamento Conceptual.Document3 pagesFisica 1 Funcion Cuadratica y Su Grafica Fundamento Conceptual.Maikol Alexander100% (1)
- Teoria Moderna de ControlDocument11 pagesTeoria Moderna de ControlJose Mata RamcharanNo ratings yet
- LinealizaciónDocument1 pageLinealizaciónabneralNo ratings yet
- Determinación de Sulfatos en AguasDocument10 pagesDeterminación de Sulfatos en AguasJuliette GaviriaNo ratings yet
- Informe 3 Labo FisicaDocument15 pagesInforme 3 Labo FisicaDaniela GonzalesNo ratings yet
- DiferencialesDocument8 pagesDiferencialesALEXIS CAS CASNo ratings yet
- Estimación de Las Constantes de Margules y Van Laar para Sistemas Binarios Por Correlación LinealDocument10 pagesEstimación de Las Constantes de Margules y Van Laar para Sistemas Binarios Por Correlación LinealEdgar HuancaNo ratings yet
- 31 - Tarea 2Document33 pages31 - Tarea 2Fernando robles calderonNo ratings yet
- Tema 5Document27 pagesTema 5Destruction SwordmasterNo ratings yet
- Sílabo Control Automático 2018-IDocument17 pagesSílabo Control Automático 2018-IFidel Andía GuzmánNo ratings yet
- LINEALIZACIONDocument12 pagesLINEALIZACIONJaime AlegriaNo ratings yet
- Control Por Linealizacion y ConclusionesDocument2 pagesControl Por Linealizacion y ConclusionesJose Narciso Panta FiestasNo ratings yet
- Semana 1 - Herramientas MatemáticasDocument16 pagesSemana 1 - Herramientas MatemáticasCamilo San JuanNo ratings yet
- Trabajo de Investigación-Grupo 02Document20 pagesTrabajo de Investigación-Grupo 02Stefano Andrei RamosNo ratings yet
- Manual Unidad IVDocument18 pagesManual Unidad IVyaser takeshi curasma muñozNo ratings yet
- Control de Un Helicoptero Con Dos Grados de Libertad Por Medio de Un Controlador Difuso y Un Controlador Por Realimentacion de EstadosDocument2 pagesControl de Un Helicoptero Con Dos Grados de Libertad Por Medio de Un Controlador Difuso y Un Controlador Por Realimentacion de EstadosA-SanThiago Rojas Llerena100% (1)
- Linealización de Sistemas NoDocument3 pagesLinealización de Sistemas NoSebastian GuamanNo ratings yet
- Control de NivelDocument12 pagesControl de NivelPatyHernándezNo ratings yet
- Modelado y Linealización de Sistemas No Lineales Usando MATLAB y SIMULINKDocument5 pagesModelado y Linealización de Sistemas No Lineales Usando MATLAB y SIMULINKRaúl QCNo ratings yet
- Informe ADocument9 pagesInforme AJose PintoNo ratings yet
- Tesis: Síntesis de Sistemas de Control Borroso Estables Por DiseñoDocument311 pagesTesis: Síntesis de Sistemas de Control Borroso Estables Por DiseñoA: Javier BarragánNo ratings yet
- Informe-Laboratorio 5Document9 pagesInforme-Laboratorio 5Amalia Moreira CatataNo ratings yet
- T3 Linealizar PDFDocument25 pagesT3 Linealizar PDFJose Garcia NovoaNo ratings yet
- Introduccion A Los Laboratorios de FisicaDocument26 pagesIntroduccion A Los Laboratorios de FisicaLuis Germán Caicedo SantanaNo ratings yet
- Andy Ramirez Parte IIDocument26 pagesAndy Ramirez Parte IICARLOS JAVIER COTRINA SAAVEDRANo ratings yet
- Insrumentación - Método para Linealizar La Salida de Un SensorDocument4 pagesInsrumentación - Método para Linealizar La Salida de Un Sensorvadmanh100% (1)
- Análisis Del Punto de Equilibrio: Sistemas No LinealesDocument7 pagesAnálisis Del Punto de Equilibrio: Sistemas No LinealesRomeo ShakespeareNo ratings yet
- Función CuadráticaDocument2 pagesFunción CuadráticaCaballero Alférez Roy TorresNo ratings yet
- Ejemplos Modelado e Identificacion de SistemasDocument91 pagesEjemplos Modelado e Identificacion de SistemasJuan José Ortiz Valderrama100% (1)