You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Reinforcement of Concrete StructuresDocument13 pagesReinforcement of Concrete StructurestevredeNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Russell PHD 2015 Progressive Collapse of Reinforced Concrete Flat Slab StructuresDocument238 pagesRussell PHD 2015 Progressive Collapse of Reinforced Concrete Flat Slab StructuresRm1262No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- BK Series Kilcher Bearing StripsDocument6 pagesBK Series Kilcher Bearing Stripsforbeska100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Ijsrp p46106 PDFDocument14 pagesIjsrp p46106 PDFKannan JaganNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Electric Rolling Bridge, Scientific American 24 August 1889 p120Document2 pagesElectric Rolling Bridge, Scientific American 24 August 1889 p120Rm1262No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Annerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireDocument6 pagesAnnerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireRm1262No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- ADA441347Document17 pagesADA441347habibur Rahman KhanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Henderson, Johnson & Wood 2002 Enhancing The Whole Life Structural Performance of Multi-Storey Car ParksDocument50 pagesHenderson, Johnson & Wood 2002 Enhancing The Whole Life Structural Performance of Multi-Storey Car ParksRm1262No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Technoslide Elastomeric-Plain-Sliding-Bearings-For-Bridges-Structures-BrochureDocument13 pagesTechnoslide Elastomeric-Plain-Sliding-Bearings-For-Bridges-Structures-BrochureRm1262No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Extend Abstract - 67792 - Joao GeadaDocument10 pagesExtend Abstract - 67792 - Joao GeadaRm1262No ratings yet
- Retrofitting and Rehabilitation of Fire PDFDocument134 pagesRetrofitting and Rehabilitation of Fire PDFVarun TyagiNo ratings yet
- The Concrete Society - Fire DamageDocument6 pagesThe Concrete Society - Fire DamageRm1262No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Annerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireDocument6 pagesAnnerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireRm1262No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Mera DilDocument12 pagesMera DilIqbal AhmadNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Exhibit 5f - Concept - Design - Submission 100-119Document20 pagesExhibit 5f - Concept - Design - Submission 100-119NasserZakiNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- UJ Postgraduate Engineering ManagementDocument4 pagesUJ Postgraduate Engineering ManagementRm12620% (1)
- Arup DesignYearbook 2010Document39 pagesArup DesignYearbook 2010Si MonaNo ratings yet
- IMIESA April 2021Document60 pagesIMIESA April 2021Rm1262No ratings yet
- Structural Scheme Design Guide by ArupDocument129 pagesStructural Scheme Design Guide by ArupNatalie Sullivan100% (15)
- Arup Scheme Design Guide 2006Document139 pagesArup Scheme Design Guide 2006Boris Escubio100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- STEEL CONFERENCE EXPANSION JOINTSDocument4 pagesSTEEL CONFERENCE EXPANSION JOINTSCharles Orebola OresanwoNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Swing Jib CranesDocument2 pagesSwing Jib CranesRm1262No ratings yet
- BinsDocument17 pagesBinsRm1262No ratings yet
- Cranerunwaybeams 4ed bk180 PDFDocument13 pagesCranerunwaybeams 4ed bk180 PDFMacNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
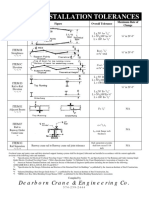
- Crane Runway Installation Tolerances-BechtelDocument1 pageCrane Runway Installation Tolerances-BechtelRm1262No ratings yet
- Narayangharh-Mugling HighwayDocument85 pagesNarayangharh-Mugling HighwayRm1262No ratings yet
- Guide To Lifting Equipment Testing Inspections 2015Document8 pagesGuide To Lifting Equipment Testing Inspections 2015Rm1262No ratings yet
- Flange BendingDocument2 pagesFlange BendingMotoro AkinwoleNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- A Challenge For Designers of Steel Silos PDFDocument6 pagesA Challenge For Designers of Steel Silos PDFRm1262No ratings yet
- How Silos FailDocument14 pagesHow Silos FailMedhat Hasanain100% (2)
- ME362 Dynamics of Machinery Course OutlineDocument16 pagesME362 Dynamics of Machinery Course OutlineMfonobong John EkottNo ratings yet
- Lesson S02C03-Moncarz P Et Al. (2000)Document5 pagesLesson S02C03-Moncarz P Et Al. (2000)gonzaloNo ratings yet
- ServoFly Applications To Use - Manual English PDFDocument13 pagesServoFly Applications To Use - Manual English PDFeletropaulomococaNo ratings yet
- Rebuilding Vessels Less Than 90 MetersDocument7 pagesRebuilding Vessels Less Than 90 MetersAxel Ivan MontaniaNo ratings yet
- BS EN 474-9-2006+A1-2009 Earth-Moving Machinery - Safety - P PDFDocument20 pagesBS EN 474-9-2006+A1-2009 Earth-Moving Machinery - Safety - P PDFFaheem KhanNo ratings yet
- Modal and ODS Analysis Using ME'scopeVES SoftwareDocument1 pageModal and ODS Analysis Using ME'scopeVES SoftwareAmir Mahmoud Mahdavi AbhariNo ratings yet
- Honeywell Switch CatalogDocument213 pagesHoneywell Switch Cataloghammondelec100% (3)
- IES 2013 Syllabus For Mechanical Engineering - ME ESE Exam SyllabusDocument3 pagesIES 2013 Syllabus For Mechanical Engineering - ME ESE Exam Syllabusjaved alamNo ratings yet
- Vibration - Fundamentals by Keith MobleyDocument302 pagesVibration - Fundamentals by Keith MobleyromadhinhoNo ratings yet
- Cmas 100Document4 pagesCmas 100Munkhnasan MonaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Factory Certificate RenewalDocument3 pagesFactory Certificate Renewalkirandevi1981No ratings yet
- Mechanical ActuatorsDocument39 pagesMechanical ActuatorsKashif UsmanNo ratings yet
- Occupational Safety and Health ActDocument71 pagesOccupational Safety and Health ActValueBrandNo ratings yet
- Mech7350 06 Steam TurbinesDocument30 pagesMech7350 06 Steam TurbinesJaime BerryNo ratings yet
- KKS StandardDocument20 pagesKKS Standardforuzz100% (1)
- European Standard Norme Européenne Europäische NormDocument14 pagesEuropean Standard Norme Européenne Europäische Normfercho2581No ratings yet
- Salient features of Leonova infinity vibration analyzerDocument7 pagesSalient features of Leonova infinity vibration analyzerNila AkterNo ratings yet
- ECO Agricultural Machinery - Proposal and Problems FinalDocument22 pagesECO Agricultural Machinery - Proposal and Problems FinalRyan Carlo Conde100% (3)
- IEC PetrochemDocument165 pagesIEC PetrochemIncredulous NoorNo ratings yet
- Interesting Standards ListDocument7 pagesInteresting Standards ListBoboskins BeeNo ratings yet
- Pune University BE Mechanical Exam Results 2013 for VBCOE CollegeDocument58 pagesPune University BE Mechanical Exam Results 2013 for VBCOE CollegeBalaji YelmarNo ratings yet
- HKS MainCatalogue Email 01Document52 pagesHKS MainCatalogue Email 01Esteban ReyesNo ratings yet
- BS en - 848 - 1 - 2007Document86 pagesBS en - 848 - 1 - 2007sangitaghaisasNo ratings yet
- CM Heavy-Duty Crane Hooks BrochureDocument12 pagesCM Heavy-Duty Crane Hooks BrochureMomchil Pekov100% (1)
- Ansi MechanicalDocument1 pageAnsi MechanicalAngelique SutantoNo ratings yet
- Show Preview AwsreDocument2 pagesShow Preview AwsreThetHeinNo ratings yet
- Drill Manual 50BDocument12 pagesDrill Manual 50BPanesar SunnyNo ratings yet
- Time Table: Semest Er Subject Name Subject Code Exam Date SessionDocument79 pagesTime Table: Semest Er Subject Name Subject Code Exam Date SessionRachel DelgadoNo ratings yet
- Reva Products CatalogueDocument33 pagesReva Products CatalogueReva CranesNo ratings yet
- Exhibitor Directory - IESS - EMS - DMS AppDocument17 pagesExhibitor Directory - IESS - EMS - DMS AppSrinathReddyNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)