You might also like
- AP Robótica Industrial (Mazaira)Document74 pagesAP Robótica Industrial (Mazaira)Henrique MarkNo ratings yet
- RoboticaDocument16 pagesRoboticaxianomaniNo ratings yet
- Introdução A RobóticaDocument22 pagesIntrodução A RobóticachnanduNo ratings yet
- Robótica IndustrialDocument93 pagesRobótica IndustrialFernando SoaresNo ratings yet
- Apostila Iniciação À RobóticaDocument117 pagesApostila Iniciação À RobóticaMaycon SouzaNo ratings yet
- Intro 2 RoboticsDocument39 pagesIntro 2 RoboticsLindalva BarrosNo ratings yet
- Robotica 4º Ano 1º BimDocument9 pagesRobotica 4º Ano 1º BimMauro Sergio MartinsNo ratings yet
- Relatório de SkillsDocument6 pagesRelatório de SkillsFlávio Rodrigo GloriaNo ratings yet
- Apostila de RoboticaDocument65 pagesApostila de RoboticaVALDECIRDOMINGOSNo ratings yet
- Introdução A RoboticaDocument112 pagesIntrodução A Roboticanilsonery100% (2)
- Material RoboticaDocument29 pagesMaterial RoboticaPedro LuisNo ratings yet
- Introd Robotica Paulo Ferreira16 (Modo de Compatibilidade)Document55 pagesIntrod Robotica Paulo Ferreira16 (Modo de Compatibilidade)MecatrônicaNo ratings yet
- Robótica - Texto CompletoDocument92 pagesRobótica - Texto CompletoBebasso LokoNo ratings yet
- RoboticaDocument14 pagesRoboticaDaniel José BasílioNo ratings yet
- Introducao À RoboticaDocument30 pagesIntroducao À RoboticaMarcellus PinheiroNo ratings yet
- Robo Movel ArduinoDocument4 pagesRobo Movel ArduinoMarília PioNo ratings yet
- 01 Introducao Robos IndustriaisDocument15 pages01 Introducao Robos IndustriaisRafael MarksonNo ratings yet
- T5 LvaeDocument12 pagesT5 LvaeAdriánLópezNo ratings yet
- SENAI - Robótica IndustrialDocument9 pagesSENAI - Robótica IndustrialsidbomNo ratings yet
- Livro Digital 255 Robótica Industrial Tema 3Document8 pagesLivro Digital 255 Robótica Industrial Tema 3LLuthy SouzaNo ratings yet
- Robótica Industrial .Document38 pagesRobótica Industrial .Mateus NizzylandNo ratings yet
- 83-Texto Do Artigo-4562-1-10-20190117Document7 pages83-Texto Do Artigo-4562-1-10-20190117Antonio Augusto Pinto JuniorNo ratings yet
- Robôs ManipuladoresDocument25 pagesRobôs Manipuladoresdanieldcbueno100% (1)
- Slides - Introdução RobóticaDocument114 pagesSlides - Introdução RobóticaLuis BarrosoNo ratings yet
- Apêndice - Curso Completo Robôs Industriais para IniciantesDocument45 pagesApêndice - Curso Completo Robôs Industriais para IniciantesHelio rodrigues da silva cabeça100% (1)
- 17 Robos IndustriaisDocument9 pages17 Robos IndustriaisSicelino MeiraNo ratings yet
- Apostila de Robotica - Rev 03 PDFDocument26 pagesApostila de Robotica - Rev 03 PDFvrjr100% (2)
- Apostila 1. Introdução À Robótica - Ação MoradiaDocument14 pagesApostila 1. Introdução À Robótica - Ação MoradiaEmmanuel TolêdoNo ratings yet
- Atividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoDocument4 pagesAtividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoaradilrpgNo ratings yet
- Automacao e Robotica Industrial Uma ReviDocument12 pagesAutomacao e Robotica Industrial Uma Revisebastiao miguel kinangaNo ratings yet
- ROBOTICA 02 A Componentes PDFDocument56 pagesROBOTICA 02 A Componentes PDFHelder Anibal HerminiNo ratings yet
- Robo Modular OmnidirecionalDocument4 pagesRobo Modular OmnidirecionalGabriel CalzaNo ratings yet
- Aula 01Document32 pagesAula 01Madson RicardoNo ratings yet
- Inteligência Artifical NavegaçãoDocument5 pagesInteligência Artifical NavegaçãoSergio RicardoNo ratings yet
- Robot 02 NDocument8 pagesRobot 02 NEliasibe AlvesNo ratings yet
- Apostila Robótica Educacional Módulo 1Document97 pagesApostila Robótica Educacional Módulo 1Robovix Cursos81% (16)
- Aula 01 - Introdução À RobóticaDocument37 pagesAula 01 - Introdução À RobóticaRobótica AlvimarNo ratings yet
- Robótica Aula 1 MorfologiaEDocument82 pagesRobótica Aula 1 MorfologiaEDomingosInacioCaetanoDieyc100% (1)
- RobóticaDocument6 pagesRobóticaLudmila KarinaNo ratings yet
- RB ApostilaDocument95 pagesRB ApostilaLuiz Carlos VidalNo ratings yet
- Slide para Oficina de RobóticaDocument33 pagesSlide para Oficina de RobóticaMárcio NunesNo ratings yet
- Braço RoboticoDocument72 pagesBraço RoboticoAlmir AndradeNo ratings yet
- Dados Motor EsteiraDocument5 pagesDados Motor EsteiraWenison SantosNo ratings yet
- IF66J-17a RT RoboAranhaDocument15 pagesIF66J-17a RT RoboAranhasamaraNo ratings yet
- Robot 02 QDocument2 pagesRobot 02 QEliasibe AlvesNo ratings yet
- Fundamentos de Robotica - SenaispDocument11 pagesFundamentos de Robotica - SenaispJoao Paulo CecilioNo ratings yet
- Anatomia de Manipuladores RobóticosDocument75 pagesAnatomia de Manipuladores RobóticosThiago MaiaNo ratings yet
- Braço RobóticoDocument12 pagesBraço RobóticoRick Jones Martins FerreiraNo ratings yet
- Robos IndustriaisDocument3 pagesRobos IndustriaisMedson FrazaoNo ratings yet
- AulaAutomaoIndustrialRobtica 20161109120348 PDFDocument108 pagesAulaAutomaoIndustrialRobtica 20161109120348 PDFLory VianaNo ratings yet
- Braço Articulado PDFDocument6 pagesBraço Articulado PDFEloi Myszka JuniorNo ratings yet
- Invenções Que Se Movem: Introdução À RobóticaDocument24 pagesInvenções Que Se Movem: Introdução À Robóticapaulapereira6836No ratings yet
- 4 0 Parte 5Document7 pages4 0 Parte 5Vinicius CaieroNo ratings yet
- Material Complementar Modulo2 ROBOTICADocument31 pagesMaterial Complementar Modulo2 ROBOTICAFernanda Maria Messias FreitasNo ratings yet
- Teoria Braco RoboticoDocument15 pagesTeoria Braco RoboticoHeittor DinizNo ratings yet
- Robotica Teoria e Pratica ROBOTICA TEORIDocument173 pagesRobotica Teoria e Pratica ROBOTICA TEORIRafael SantosNo ratings yet
- ROBOTICA Parte1Document33 pagesROBOTICA Parte1TiagoNo ratings yet
- 9888 18845 1 PBDocument6 pages9888 18845 1 PBDausten VitorNo ratings yet
- Arquitectura de Computadores PDFDocument99 pagesArquitectura de Computadores PDFpggsNo ratings yet
- A Tragédia Grega Na Poética SlidesDocument26 pagesA Tragédia Grega Na Poética SlidesRafael CensonNo ratings yet
- A Sua Maneira (Simplificada)Document1 pageA Sua Maneira (Simplificada)Giovany Pereira ValleNo ratings yet
- MecFund Aula 08 - Oscilador Harmonico Amortecido PDFDocument57 pagesMecFund Aula 08 - Oscilador Harmonico Amortecido PDFLeonardoMaiaNo ratings yet
- Manual Técnico Aparelho de Anestesia Takaoka Sat 500Document188 pagesManual Técnico Aparelho de Anestesia Takaoka Sat 500CENTRO OESTE100% (1)
- A Maturidade Na Perspectiva de Eclesiastes 12Document37 pagesA Maturidade Na Perspectiva de Eclesiastes 12ÁudioVisual PIBItaqueraNo ratings yet
- Sexo Privilegiado (O Fim Do Mito Da Fragilidade Feminina) PDFDocument8 pagesSexo Privilegiado (O Fim Do Mito Da Fragilidade Feminina) PDFShirley Kettili100% (5)
- Folheto Crisma 1Document2 pagesFolheto Crisma 1Murilo Vilas BoasNo ratings yet
- Bingo CientirinhasDocument10 pagesBingo CientirinhasCARLOS FALCASSA100% (2)
- Questo Es - Qui Mica Ba Sica - Parte 1Document8 pagesQuesto Es - Qui Mica Ba Sica - Parte 1Manoele DominicNo ratings yet
- Afasia de ConduçãoDocument55 pagesAfasia de ConduçãopatriciasusckingNo ratings yet
- Editora BAGAI - Filosofia AfricanaDocument110 pagesEditora BAGAI - Filosofia Africanadomingos beula fortunato100% (1)
- 06 LIGACAO CUBO-EIXO - Chavetas Rev-CDocument41 pages06 LIGACAO CUBO-EIXO - Chavetas Rev-CLuiz Carlos BrandaliseNo ratings yet
- SRTV Televisao MonocromaticoDocument14 pagesSRTV Televisao MonocromaticoBruno MozNo ratings yet
- Máquina Envasadora de CremeDocument33 pagesMáquina Envasadora de CremefabriniNo ratings yet
- As Microcervejarias No Brasil Atual - Eduardo MarcussoDocument171 pagesAs Microcervejarias No Brasil Atual - Eduardo MarcussoodairnettoNo ratings yet
- A Influência Do Suporte Familiar Na Depressão em AdolescentesDocument5 pagesA Influência Do Suporte Familiar Na Depressão em AdolescentesisabelsardNo ratings yet
- Avaliação 30 Dias NOVODocument4 pagesAvaliação 30 Dias NOVORodrigo GuterresNo ratings yet
- ESTRUTURADocument9 pagesESTRUTURACarlos Felipe Bezerra De LimaNo ratings yet
- JW1 - Projeto Executivos - Pontos Elétricos e Hidráulicos WilkeDocument6 pagesJW1 - Projeto Executivos - Pontos Elétricos e Hidráulicos WilkeJean silvaNo ratings yet
- Dezembro LaranjaDocument7 pagesDezembro LaranjaLetíciaNo ratings yet
- Soprador Omel - Dados SRTVDocument7 pagesSoprador Omel - Dados SRTVDenilson MarinhoNo ratings yet
- A Revolução Industrial: Instituto Estadual de EducaçãoDocument4 pagesA Revolução Industrial: Instituto Estadual de EducaçãoProfessor Jefferson BragaNo ratings yet
- Líder, Como Motivar e Engajar Seus LideradosDocument19 pagesLíder, Como Motivar e Engajar Seus LideradosFranks Lennon Figueiredo RibeiroNo ratings yet
- Montando Um Descarregador de CapacitoresDocument4 pagesMontando Um Descarregador de CapacitoresriofelizNo ratings yet
- PCC BiocelDocument3 pagesPCC Biocelallisonassun10No ratings yet
- LaudoSodre-1635106089 53Document3 pagesLaudoSodre-1635106089 53Romario de SousaNo ratings yet
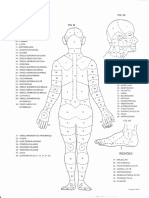
- Topografia Corpo HumanoDocument2 pagesTopografia Corpo Humanoestevaocanan100% (9)
- Transmissor Com Ba1404 e 2sc2458Document8 pagesTransmissor Com Ba1404 e 2sc2458carrlosalbertodossantossilvaNo ratings yet