You might also like
- PhDreport 1styearDocument2 pagesPhDreport 1styearKarthick DharmarajanNo ratings yet
- AbstractDocument2 pagesAbstractKarthick DharmarajanNo ratings yet
- PhDreport 1styearDocument2 pagesPhDreport 1styearKarthick DharmarajanNo ratings yet
- Ph.D. Research Proposal: Collision Avoidance in Space EnvironmentDocument8 pagesPh.D. Research Proposal: Collision Avoidance in Space EnvironmentKarthick DharmarajanNo ratings yet
- Calendar First Semester 2017 - 2018Document1 pageCalendar First Semester 2017 - 2018Karthick DharmarajanNo ratings yet
- Ph.D. Research Proposal: Collision Avoidance in Space EnvironmentDocument8 pagesPh.D. Research Proposal: Collision Avoidance in Space EnvironmentKarthick DharmarajanNo ratings yet
- Ph.D. Research Proposal: Collision Avoidance in Space EnvironmentDocument8 pagesPh.D. Research Proposal: Collision Avoidance in Space EnvironmentKarthick DharmarajanNo ratings yet
- Review Dates For Ug PT and PG R PT Jul 14 - Apr 15Document1 pageReview Dates For Ug PT and PG R PT Jul 14 - Apr 15Karthick DharmarajanNo ratings yet
- Time Table For Aeronautical Sathyabama UniversityDocument1 pageTime Table For Aeronautical Sathyabama UniversityKarthick DharmarajanNo ratings yet
- HMT Question BankDocument20 pagesHMT Question BankKarthick DharmarajanNo ratings yet
- Sathyabama Mech Time TableDocument2 pagesSathyabama Mech Time TableKarthick DharmarajanNo ratings yet
- Qestions FRM Composite... and RocktDocument2 pagesQestions FRM Composite... and RocktKarthick DharmarajanNo ratings yet
- Schlieren Is German For Striations'. The Term Was Coined by Albert Töpler, Who Developed TheDocument20 pagesSchlieren Is German For Striations'. The Term Was Coined by Albert Töpler, Who Developed TheKarthick DharmarajanNo ratings yet
- Aerodynamics II 2008Document2 pagesAerodynamics II 2008Karthick DharmarajanNo ratings yet
- All Events ListDocument7 pagesAll Events ListKarthick DharmarajanNo ratings yet
- Abstract 001Document1 pageAbstract 001Karthick DharmarajanNo ratings yet
- Event X: Prize Money Worth INR 7000Document1 pageEvent X: Prize Money Worth INR 7000Karthick DharmarajanNo ratings yet
- Schlieren Is German For Striations'. The Term Was Coined by Albert Töpler, Who Developed TheDocument20 pagesSchlieren Is German For Striations'. The Term Was Coined by Albert Töpler, Who Developed TheKarthick DharmarajanNo ratings yet
- FrictionDocument14 pagesFrictionKarthick DharmarajanNo ratings yet
- Sensor TechnologyDocument3 pagesSensor TechnologyKarthick DharmarajanNo ratings yet
- BreathalyzerDocument7 pagesBreathalyzerKarthick DharmarajanNo ratings yet
- Bentley Audi A4 B6 RadioDocument82 pagesBentley Audi A4 B6 RadioKarthick DharmarajanNo ratings yet
- Como Desenhar Mangá - Básico e ExpressõesDocument7 pagesComo Desenhar Mangá - Básico e Expressõesvinicius0398No ratings yet
- How To Draw Anime For Beginner (ENG)Document153 pagesHow To Draw Anime For Beginner (ENG)yuu12399% (194)
- How To Draw Anime For Beginner (ENG)Document153 pagesHow To Draw Anime For Beginner (ENG)yuu12399% (194)
- BreathalyzerDocument7 pagesBreathalyzerKarthick DharmarajanNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
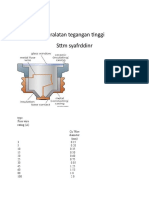
- PCBDesign Tutorial Rev ADocument70 pagesPCBDesign Tutorial Rev Asyafruddinr_68006517No ratings yet
- TRC Srp40a Power SupplyDocument2 pagesTRC Srp40a Power SupplyFrederic ReblewskiNo ratings yet
- The Role of Magnetizing and Leakage InductanceDocument7 pagesThe Role of Magnetizing and Leakage InductanceJosNo ratings yet
- Mechanical SpringDocument49 pagesMechanical SpringYeamlak SisayNo ratings yet
- IEEE - C37.04i - 1991 AC HV Circuit BreakersDocument3 pagesIEEE - C37.04i - 1991 AC HV Circuit BreakersSamir MukhtarNo ratings yet
- Paul White - Piano Technique PDFDocument80 pagesPaul White - Piano Technique PDFOmar ValenzuelaNo ratings yet
- Wavesproblems PDFDocument23 pagesWavesproblems PDFThols TholkapiyanNo ratings yet
- Installation Instructions: Protector Trip Relays DIN Rail & Wall Mounted 250 Series Paralleling & Reverse PowerDocument8 pagesInstallation Instructions: Protector Trip Relays DIN Rail & Wall Mounted 250 Series Paralleling & Reverse PowerAnonymous RcxX0FcNo ratings yet
- RMC-131D Data Sheet 4921240104 UK - 2014.06.25Document8 pagesRMC-131D Data Sheet 4921240104 UK - 2014.06.25Muhammad AhmadNo ratings yet
- Reducing The Fault Current and Overvoltage in A Distribution System With Distributed Generation Units Through An Active Type SFCLDocument5 pagesReducing The Fault Current and Overvoltage in A Distribution System With Distributed Generation Units Through An Active Type SFCLReddyKvmNo ratings yet
- MG Standard Motors: 3 Phase 0.25 - 22 KWDocument7 pagesMG Standard Motors: 3 Phase 0.25 - 22 KWLuis D. RodriguezNo ratings yet
- Electrical Specifications Division 16 SECTION 16120 WIRES AND CABLESDocument11 pagesElectrical Specifications Division 16 SECTION 16120 WIRES AND CABLESeng_asayedNo ratings yet
- Loss Evaluation of HVAC and HVDC PDFDocument10 pagesLoss Evaluation of HVAC and HVDC PDFmkızılelmaNo ratings yet
- JJ207 Thermodynamic Topic 2 First Law of ThermodynamicsDocument34 pagesJJ207 Thermodynamic Topic 2 First Law of ThermodynamicsAh Tiang50% (2)
- Laser Torch Based Voice Transmitter and ReceiverDocument30 pagesLaser Torch Based Voice Transmitter and ReceiverUma Mahesh50% (4)
- CEP Assignmnet Number 2 Network AnalysisDocument3 pagesCEP Assignmnet Number 2 Network AnalysisHussain MustafaNo ratings yet
- Heat Elements Hot-Plates PDFDocument18 pagesHeat Elements Hot-Plates PDFcupid75100% (1)
- Tneb - 1Document266 pagesTneb - 1Imran ZakirNo ratings yet
- Calculo de Tierras FisicasDocument12 pagesCalculo de Tierras FisicasVae Alk100% (1)
- Protection Coordination Report: Camerich Paper Private LTDDocument42 pagesProtection Coordination Report: Camerich Paper Private LTDramesh cuppuNo ratings yet
- Indian Standards On Earthquake EngineeringDocument12 pagesIndian Standards On Earthquake EngineeringHari RNo ratings yet
- User Manual: SGQ - Ats Automatic Transfer SwitchDocument11 pagesUser Manual: SGQ - Ats Automatic Transfer SwitchJulio Cesar Hinostroza AlarconNo ratings yet
- Mechatronics: Electrical Actuation SystemsDocument32 pagesMechatronics: Electrical Actuation SystemsKARTHIK S SNo ratings yet
- 1.6 Surface Tension and Capillarity - CE 309-CE22S2 - Fluid MechanicsDocument4 pages1.6 Surface Tension and Capillarity - CE 309-CE22S2 - Fluid MechanicsRusselNo ratings yet
- Understanding and Managing Power: System HarmonicsDocument58 pagesUnderstanding and Managing Power: System HarmonicsRajendra Prasad ShuklaNo ratings yet
- Technology and Vocational Education: Quarter 03 - W1Document36 pagesTechnology and Vocational Education: Quarter 03 - W1Jake Baluya60% (5)
- Classical Theory of Electrical ConductionDocument3 pagesClassical Theory of Electrical ConductionRey Angelo Carbilledo Jr.No ratings yet
- Mil-Hdbk-304 - (Package Cushioning Design)Document104 pagesMil-Hdbk-304 - (Package Cushioning Design)Alex DobrescuNo ratings yet
- The Current Transformer Model With ATP-EMTP For Transient Response Characteristic and Its Effect On Differential Relays PerformnceDocument6 pagesThe Current Transformer Model With ATP-EMTP For Transient Response Characteristic and Its Effect On Differential Relays Performnceamir amirNo ratings yet
- Chapter 2Document61 pagesChapter 2TrueManSoulNo ratings yet