You might also like
- Actividad 1. Circuitos Con DiodosDocument5 pagesActividad 1. Circuitos Con DiodosMaria FernandaNo ratings yet
- Práctica No. 10 Conversor Gray A BinarioDocument18 pagesPráctica No. 10 Conversor Gray A BinarioANAHI SOSA ROMERONo ratings yet
- Introducción a la Mecatrónica - Actividad #6: Características y aplicaciones del circuito integrado 7432Document5 pagesIntroducción a la Mecatrónica - Actividad #6: Características y aplicaciones del circuito integrado 7432Pedro LozanoNo ratings yet
- Computacion 2012 1Document7 pagesComputacion 2012 1PaIacios G GPalaciosNo ratings yet
- Ilovepdf MergedDocument7 pagesIlovepdf MergedEmmanuel Alejandro Piña TapiaNo ratings yet
- Procesamiento Digital de SeñalesDocument5 pagesProcesamiento Digital de SeñalesEduardo Lopez SalasNo ratings yet
- Syllabus PDS 2015 II V1Document3 pagesSyllabus PDS 2015 II V1Parco Camasca VidalNo ratings yet
- Practica #4 Sumador de 4 Bits Unidad 2Document6 pagesPractica #4 Sumador de 4 Bits Unidad 2AbrahamMejíaNo ratings yet
- Circuitos DigitalesDocument3 pagesCircuitos DigitalesJavier SolisNo ratings yet
- Laboratorio Digital2Document2 pagesLaboratorio Digital2Lujum Irt Mojam Urb0% (1)
- DIGITALES SillabusDocument3 pagesDIGITALES SillabusJESUS ANGEL CRUZ CAJANo ratings yet
- Circuitos CombinacionalesDocument196 pagesCircuitos Combinacionalesjavier132No ratings yet
- Práctica 1 - Control de Maquinas EléctricasDocument9 pagesPráctica 1 - Control de Maquinas EléctricasJOSE ISAI CHON GRIJALVANo ratings yet
- Curso de Electrónica RecreativaDocument27 pagesCurso de Electrónica Recreativamiguelon2009_4545No ratings yet
- Silabos Electronica InfDocument101 pagesSilabos Electronica InfJoseNo ratings yet
- Ciclo-05-Ie-Circuitos Digitales-MoscosoDocument2 pagesCiclo-05-Ie-Circuitos Digitales-MoscosoRomel Cárdenas JavierNo ratings yet
- Metodos Computacionales en Ingenieria IIDocument5 pagesMetodos Computacionales en Ingenieria IIJose OrtizNo ratings yet
- 4.5. Analisis y Diseño de Circuitos DigitalesDocument3 pages4.5. Analisis y Diseño de Circuitos DigitalesJuan Jose Nina CharajaNo ratings yet
- Formato Visita TécnicaDocument4 pagesFormato Visita TécnicaLoko Darwin D D FNo ratings yet
- Compuertas and or Semana 7Document7 pagesCompuertas and or Semana 7RickNo ratings yet
- Reporte Practica 8 Edgar Ulises Mendoza Salazar 20300602 5G PDFDocument5 pagesReporte Practica 8 Edgar Ulises Mendoza Salazar 20300602 5G PDFUlises MendozaNo ratings yet
- Reporte de Practica 1 OceaDocument7 pagesReporte de Practica 1 OceaLuis Gerardo Villarruel Ramirez 蛇No ratings yet
- M.A. Sensores y Acondicionamiento de Se AlesDocument36 pagesM.A. Sensores y Acondicionamiento de Se AlesRafael Villegas MetelinNo ratings yet
- Manual de Informatica Forense IDocument596 pagesManual de Informatica Forense IMarc75% (4)
- Sylabus Electricidad y Electrónica Industrial 2018-IIDocument3 pagesSylabus Electricidad y Electrónica Industrial 2018-IIJorge Arias AcevedoNo ratings yet
- Curso de ElectrónicaDocument73 pagesCurso de ElectrónicaMarcelo Nicolas VegaNo ratings yet
- Actividad 4 Sistemas DigitalesDocument2 pagesActividad 4 Sistemas DigitalesJeiner AnayaNo ratings yet
- Actividad 4 Sistemas DigitalesDocument2 pagesActividad 4 Sistemas DigitalesJeiner AnayaNo ratings yet
- Medición V-I salida AND DTLDocument19 pagesMedición V-I salida AND DTLJavier Antonio (Solis Valles)No ratings yet
- Silabo Tecnologia ElectronicaDocument5 pagesSilabo Tecnologia ElectronicaEddy TorresNo ratings yet
- Laboratorio Nº4 ContadoresDocument4 pagesLaboratorio Nº4 ContadoresJOSENo ratings yet
- Sensor InductivoDocument7 pagesSensor InductivoWalter ScaNo ratings yet
- Silabo MT127Document4 pagesSilabo MT127Alejo977xNo ratings yet
- Practicas de Electronica Analogica Parte 2 PDFDocument30 pagesPracticas de Electronica Analogica Parte 2 PDFfusfernandoNo ratings yet
- Fasciculo 03 - El Laboratorio de Electronica (1) - OCRDocument34 pagesFasciculo 03 - El Laboratorio de Electronica (1) - OCRLuis Angel Vazquez GonzalezNo ratings yet
- CarátulasDocument4 pagesCarátulasDaniel Moruco TalaveraNo ratings yet
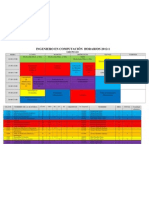
- Horario de Grupo 4MT1Document1 pageHorario de Grupo 4MT1Oswaldo Sánchez HernándezNo ratings yet
- 3 Correlativas Licenciatura en Redes de Comunicaciones PDFDocument24 pages3 Correlativas Licenciatura en Redes de Comunicaciones PDFhernanraviolNo ratings yet
- Tesis Estrella ElectronicaDocument72 pagesTesis Estrella ElectronicajesuscantuariasNo ratings yet
- Ejemplos de Implementacion de Arduino Con SensoresDocument5 pagesEjemplos de Implementacion de Arduino Con SensoresMax Linder Villegas DiapizNo ratings yet
- 22 Valverde N. - Manual para La Optimizacion de Servicios Sobre DomoticaDocument60 pages22 Valverde N. - Manual para La Optimizacion de Servicios Sobre DomoticaJuanNo ratings yet
- Saldaña MD PDFDocument177 pagesSaldaña MD PDFInesitaAlmachiNo ratings yet
- CurriculumDocument6 pagesCurriculumarsenal997No ratings yet
- Silabo-Instrumentacion y Automatizacion (2020-A)Document5 pagesSilabo-Instrumentacion y Automatizacion (2020-A)Carlos AlvaNo ratings yet
- CircuitosProtoDocument2 pagesCircuitosProtoGustavo Renzo Meza Flores100% (1)
- Digi Silabo Ee635Document3 pagesDigi Silabo Ee635Aomine DaikiNo ratings yet
- Fieldbus LibroDocument120 pagesFieldbus LibroIsaac EliasNo ratings yet
- Tema 4 - Practicas Del 3 Al 6Document32 pagesTema 4 - Practicas Del 3 Al 6David Staser ToralNo ratings yet
- Int P5Document2 pagesInt P5Pedro Rodríguez AlvarezNo ratings yet
- Puente H control motor DCDocument3 pagesPuente H control motor DCEduardo CajasNo ratings yet
- Libros de Automatas ProgramablesDocument3 pagesLibros de Automatas ProgramablesPipe CastilloNo ratings yet
- Club 38 - TSE-E1-Lec3y4 PDFDocument75 pagesClub 38 - TSE-E1-Lec3y4 PDFantonio de jesus reyes luzardoNo ratings yet
- Roxana Flores CV ULASALLEDocument10 pagesRoxana Flores CV ULASALLEShagun Condori SacariNo ratings yet
- Lab07 OptoElectrónicaDocument11 pagesLab07 OptoElectrónicamakens pomaNo ratings yet
- Practica 7Document7 pagesPractica 7Pedro LozanoNo ratings yet
- Electrotecnia I (Cuestionario)Document4 pagesElectrotecnia I (Cuestionario)Alex Gerson Perez RojasNo ratings yet
- Reingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)From EverandReingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)Rating: 5 out of 5 stars5/5 (2)
- Arduino. Edición 2018 Curso prácticoFrom EverandArduino. Edición 2018 Curso prácticoRating: 4 out of 5 stars4/5 (15)
- Proyeto de IluminacionDocument12 pagesProyeto de IluminacionHiram LoyaNo ratings yet
- CiclosDocument2 pagesCiclosHiram LoyaNo ratings yet
- Dominio, URLDocument1 pageDominio, URLHiram LoyaNo ratings yet
- Practica Nro 3 HDocument6 pagesPractica Nro 3 HHiram LoyaNo ratings yet
- El Potencial de La Radiacion SolarDocument14 pagesEl Potencial de La Radiacion SolarHiram LoyaNo ratings yet
- Tarifas agrícolas México 2020Document5 pagesTarifas agrícolas México 2020Hiram LoyaNo ratings yet
- Parques eólicos en IndiaDocument5 pagesParques eólicos en IndiaHiram LoyaNo ratings yet
- Memoria Técnico DescriptivaDocument2 pagesMemoria Técnico DescriptivaHiram LoyaNo ratings yet
- Tarea 1 PLCDocument4 pagesTarea 1 PLCHiram LoyaNo ratings yet
- Practica PLCDocument14 pagesPractica PLCHiram LoyaNo ratings yet
- Practica PLCDocument14 pagesPractica PLCHiram LoyaNo ratings yet
- Presentacion sIMATIC S71200RDocument72 pagesPresentacion sIMATIC S71200RDiana Patricia Vélez GranadaNo ratings yet
- Evolución automatización industrial 70 añosDocument2 pagesEvolución automatización industrial 70 añoslloga77341No ratings yet
- Circuitos Secuenciales: Los 4 tipos básicos de Flip-FlopsDocument6 pagesCircuitos Secuenciales: Los 4 tipos básicos de Flip-FlopsHiram LoyaNo ratings yet
- Practica PLCDocument14 pagesPractica PLCHiram LoyaNo ratings yet
- Componenetes NeumaticosDocument5 pagesComponenetes NeumaticosHiram LoyaNo ratings yet
- Investigacion U 2Document23 pagesInvestigacion U 2Hiram LoyaNo ratings yet
- Metodo Transformada de LaplaceDocument12 pagesMetodo Transformada de LaplaceHiram LoyaNo ratings yet
- Redes de Aire ComprimidoDocument15 pagesRedes de Aire ComprimidoHiram LoyaNo ratings yet
- Prueba de Aislamiento de Un TransformadorDocument7 pagesPrueba de Aislamiento de Un TransformadorHiram LoyaNo ratings yet
- Trabajo de Investigación-Física ModernaDocument16 pagesTrabajo de Investigación-Física ModernaHiram LoyaNo ratings yet
- Analisis de Circuitos Con FourierDocument48 pagesAnalisis de Circuitos Con Fouriergabriel olivas50% (4)
- SexoDocument6 pagesSexoHiram LoyaNo ratings yet
- Modelos de Negociacion.Document6 pagesModelos de Negociacion.Hiram LoyaNo ratings yet
- SexoDocument4 pagesSexoHiram LoyaNo ratings yet
- Instrumentos Básicos de Medición EquipoDocument24 pagesInstrumentos Básicos de Medición EquipoHiram LoyaNo ratings yet
- practicanro6HCIRCUITOS 2Document9 pagespracticanro6HCIRCUITOS 2Hiram LoyaNo ratings yet
- Condensado de BoseDocument10 pagesCondensado de BoseHiram LoyaNo ratings yet
- Trabajo de Investigación-Física ModernaDocument16 pagesTrabajo de Investigación-Física ModernaHiram LoyaNo ratings yet
- Clase4Document15 pagesClase4holaNo ratings yet
- Hoja-Datos-Pce-Atp-1-Kit 2Document2 pagesHoja-Datos-Pce-Atp-1-Kit 2nicolas espinosaNo ratings yet
- Diapositiva Memoria SecundariaDocument4 pagesDiapositiva Memoria Secundariaedgar sebastian quispe berrocalNo ratings yet
- Modulo Multiusuario y en RedDocument56 pagesModulo Multiusuario y en RedzahidantoNo ratings yet
- Computaci̇on Pri̇mari̇a 456Document10 pagesComputaci̇on Pri̇mari̇a 456Leiny Ugaz BardalesNo ratings yet
- Actividad de La Unidad IV.Document5 pagesActividad de La Unidad IV.Araceli FrancoNo ratings yet
- El Software y HardwareDocument21 pagesEl Software y HardwarecontabilidadsabadoluisaNo ratings yet
- 060 SubrayadoDocument48 pages060 SubrayadoerNo ratings yet
- Introduccion A Los Sistemas MicroprocesadosDocument49 pagesIntroduccion A Los Sistemas MicroprocesadosFreddy Cantero ChicoNo ratings yet
- Tema 1. Fundamentos de HardwareDocument32 pagesTema 1. Fundamentos de HardwareIlyas BakchichNo ratings yet
- Simm CuadeSrnoDocument26 pagesSimm CuadeSrnokarensyluna1999No ratings yet
- Base de Datos DistribuidasDocument20 pagesBase de Datos DistribuidasDiego JoaquinNo ratings yet
- Tema 8 Introducción A Los Sistemas Operativos: ContenidoDocument19 pagesTema 8 Introducción A Los Sistemas Operativos: Contenidodvds_okNo ratings yet
- Dispositivos de AlmacenmientoDocument7 pagesDispositivos de AlmacenmientojmjmmosqueNo ratings yet
- Precio: $799.90: Sistema de Computadora Yoytec Exigente Incluye Teclado, Ratón Óptico y BocinasDocument2 pagesPrecio: $799.90: Sistema de Computadora Yoytec Exigente Incluye Teclado, Ratón Óptico y BocinasabrahamNo ratings yet
- Resumen Examen Final EstructuraDocument5 pagesResumen Examen Final EstructuraJoaqui RodriguezNo ratings yet
- 1.7 ControlDocument5 pages1.7 ControlAGLAE GUTIERREZ VELARDENo ratings yet
- Informe Tecnico InformaticaDocument3 pagesInforme Tecnico Informaticajeferson sotilloNo ratings yet
- Administrador Red Hat Fedora v2-6Document164 pagesAdministrador Red Hat Fedora v2-6oscarinsfranNo ratings yet
- Gestión memoria: jerarquía, caché, virtual, asignaciónDocument9 pagesGestión memoria: jerarquía, caché, virtual, asignaciónTau MinNo ratings yet
- Listado Ledacom 30 09 2020Document14 pagesListado Ledacom 30 09 2020Andres Felipe Gomez EcheverriNo ratings yet
- GrubDocument11 pagesGrubCERON203200732No ratings yet
- Eléctrónica Digital 2Document3 pagesEléctrónica Digital 2Wara TorrezNo ratings yet
- Diseño de Una Memoria CacheDocument4 pagesDiseño de Una Memoria CacheOLIVIA BURGOS BLANCONo ratings yet
- Inmovilizador ElectronicoDocument19 pagesInmovilizador ElectronicoRicardo Javier flores romeroNo ratings yet
- Computación MóvilDocument6 pagesComputación MóvilCitlalli Morales MartinezNo ratings yet
- Diseño Sistemas Información Medida NegocioDocument2 pagesDiseño Sistemas Información Medida NegocioRoly Mañuico FloresNo ratings yet
- 06 La Memoria Ram PDFDocument1 page06 La Memoria Ram PDFEduardo GarcíaNo ratings yet
- Manual de UsuariovigenteDocument48 pagesManual de UsuariovigentemarenaNo ratings yet
- Desensamble y Esamble de Computadoras Portatiles 1Document20 pagesDesensamble y Esamble de Computadoras Portatiles 1Alix ContrerasNo ratings yet