You might also like
- Temps Unitaires PDFDocument6 pagesTemps Unitaires PDFFadiga Kalilou80% (20)
- °td-Examens Optique-Geo FSM 2020 SMPCDocument36 pages°td-Examens Optique-Geo FSM 2020 SMPCBakary KeitaNo ratings yet
- Metrologie de BaseDocument8 pagesMetrologie de BaseA. samir86% (7)
- Espaces VectorielsDocument8 pagesEspaces Vectorielsossama100% (1)
- Radu Cinamar - Le Mystere EgyptienDocument207 pagesRadu Cinamar - Le Mystere Egyptienraoul ducool100% (1)
- 2ac Hydrostatique CorrigeDocument14 pages2ac Hydrostatique CorrigeMejdi Abassi75% (4)
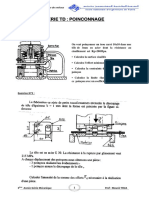
- TD PoinconnageDocument12 pagesTD Poinconnagegadri100% (4)
- Exercice Cinématique Solide Avec CorrectionDocument6 pagesExercice Cinématique Solide Avec Correctionomar EL AADDAMNo ratings yet
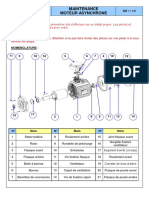
- Démontage Remontage - Maintenance Moteur PDFDocument5 pagesDémontage Remontage - Maintenance Moteur PDFMayor Nfmn100% (2)
- 12 - Synthese de L'aspirine CorDocument6 pages12 - Synthese de L'aspirine CorChartier Julien100% (3)
- Corrige D Examen MNT PRV 4fDocument3 pagesCorrige D Examen MNT PRV 4fNasserNo ratings yet
- Regressions Et Trajectoires 3DDocument34 pagesRegressions Et Trajectoires 3DJJacquelin100% (11)
- Pompe A Pistons Axiaux PDFDocument8 pagesPompe A Pistons Axiaux PDFNadia DridiNo ratings yet
- C 04-02 PDFDocument8 pagesC 04-02 PDFkharrat samirNo ratings yet
- m14 Sensibilisation A La Qualite Ge EsaDocument75 pagesm14 Sensibilisation A La Qualite Ge EsaNadia DridiNo ratings yet
- Chapitre.3 Partie.1Document38 pagesChapitre.3 Partie.1Nadia DridiNo ratings yet
- Calcul Des Boulons Au CisaillementDocument2 pagesCalcul Des Boulons Au CisaillementNadia DridiNo ratings yet
- Pompe A Pistons Axiaux PDFDocument8 pagesPompe A Pistons Axiaux PDFNadia DridiNo ratings yet
- Designation Materiaux v4Document6 pagesDesignation Materiaux v4Hatem LaajiliNo ratings yet
- Tap PDFDocument248 pagesTap PDFNadia DridiNo ratings yet
- Position Protection Animale ChasseDocument9 pagesPosition Protection Animale ChasseNadia DridiNo ratings yet
- Caracteristiques Des HuilesDocument9 pagesCaracteristiques Des Huilessl1962100% (1)
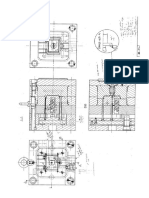
- Plan de MouleDocument1 pagePlan de MouleNadia DridiNo ratings yet
- Examen 2013Document4 pagesExamen 2013Brahim MouhcineNo ratings yet
- EffetgyroscopiqueDocument22 pagesEffetgyroscopiqueNadia DridiNo ratings yet
- Sujet 1 PDFDocument10 pagesSujet 1 PDFLarbi ElbakkaliNo ratings yet
- Accoudoirv 5Document46 pagesAccoudoirv 5Nadia DridiNo ratings yet
- Automobile 1 V 2Document41 pagesAutomobile 1 V 2Nadia DridiNo ratings yet
- Moule D'injectionDocument3 pagesMoule D'injectionNadia DridiNo ratings yet
- Empreintesv 6Document17 pagesEmpreintesv 6amrNo ratings yet
- Carte de L'europe À ImprimerDocument1 pageCarte de L'europe À ImprimerNadia DridiNo ratings yet
- Vocabulaire Moule DinjectionDocument1 pageVocabulaire Moule DinjectionMouradBenSedrineNo ratings yet
- Operations Geometriques 2DDocument12 pagesOperations Geometriques 2DNadia DridiNo ratings yet
- Implementation D Un Modele de ComportemeDocument3 pagesImplementation D Un Modele de ComportemeNadia DridiNo ratings yet
- Vocabulaire Moule DinjectionDocument1 pageVocabulaire Moule DinjectionMouradBenSedrineNo ratings yet
- Torsion Act (Banc D'essai)Document4 pagesTorsion Act (Banc D'essai)Nadia DridiNo ratings yet
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 pagesCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiNo ratings yet
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 pagesCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiNo ratings yet
- Généralités Sur Le Traitement D'imagesDocument52 pagesGénéralités Sur Le Traitement D'imagesNadia Boumkheld50% (4)
- 03 Complexes Complements ExosDocument5 pages03 Complexes Complements ExosBourama DjireNo ratings yet
- TC 13 Serie1generalitesfonctionsDocument1 pageTC 13 Serie1generalitesfonctionsMed Amine LagraineNo ratings yet
- GlycérideDocument59 pagesGlycérideImi GosseNo ratings yet
- M1-HU-Machines Hydr - Fiche de TP1Document8 pagesM1-HU-Machines Hydr - Fiche de TP1nonoNo ratings yet
- BOUYAHIAOUI Oussama KOUROUGHLI Mohamed Amin PDFDocument96 pagesBOUYAHIAOUI Oussama KOUROUGHLI Mohamed Amin PDFHhhh100% (2)
- Clefs: Les Énergies Les ÉnergiesDocument108 pagesClefs: Les Énergies Les Énergiesguglu doljno bit pohNo ratings yet
- MeclibreDocument3 pagesMeclibreabdelkrim salemNo ratings yet
- Alternative Methods For EMC Testing in SituDocument12 pagesAlternative Methods For EMC Testing in SitucatrysseNo ratings yet
- TD L1 S1 Biomeca 2023 StatiqueDocument40 pagesTD L1 S1 Biomeca 2023 Statiquevxcfmy2j4tNo ratings yet
- Giroux Solutions 4.8Document4 pagesGiroux Solutions 4.8Yannick DsprbsNo ratings yet
- ! Séries D'exercices ! Sujets Corrigés ! Fiches Mémo: Edition BaldDocument59 pages! Séries D'exercices ! Sujets Corrigés ! Fiches Mémo: Edition BaldAminata PouyeNo ratings yet
- PenetronDocument2 pagesPenetronyoussefNo ratings yet
- Exerxices CapacitifDocument8 pagesExerxices CapacitifFarah OûNo ratings yet
- Projet de Département Géosciences Et Génie CivilDocument14 pagesProjet de Département Géosciences Et Génie CivilOmar Rodriguez del VillarrealNo ratings yet
- 13-Stabilisateurs Sur ChantierDocument23 pages13-Stabilisateurs Sur ChantierPerotNo ratings yet
- Electrocinetique Filtres PDFDocument6 pagesElectrocinetique Filtres PDFSiraj ChahbounNo ratings yet
- Ajp jp4199404C104 PDFDocument19 pagesAjp jp4199404C104 PDFPaz BalladaresNo ratings yet
- Page Machines E5Document4 pagesPage Machines E5tresorkaomba1No ratings yet
- Activités Distiller Des MélangesDocument8 pagesActivités Distiller Des MélangesNouha JhiderNo ratings yet
- Fluage Fbaguelin Jubile F. SchlosserDocument29 pagesFluage Fbaguelin Jubile F. SchlosserBenlala Aghiles AzzedineNo ratings yet